

Планетарные механизмы с двумя подвижностями (дифференциалы)
К дифференциальным (или просто дифференциалам) относятся механизмы у которых нет опорного колеса, т.е. оба центральных колеса в них подвижны. Дифференциал имеет две степени свободы, так как при заданном угле поворота одного из его центральных звеньев углы поворота двух других не являются определёнными. Поэтому передаточное отношение в дифференциале не имеет определенного значения.
На практике в качестве дифференциальных
механизмов c
![]() наиболее часто применяются планетарные
зубчатые механизмы, или, как их еще
называют, планетарные дифференциалы.
Это название справедливо для механизмов,
в которых входной энергетический поток
разделяется на два выходных потока.
Если входные энергетические потоки
суммируются на выходе в один выходной
поток, то такие механизмы следует
называть суммирующими, или интегральными.
наиболее часто применяются планетарные
зубчатые механизмы, или, как их еще
называют, планетарные дифференциалы.
Это название справедливо для механизмов,
в которых входной энергетический поток
разделяется на два выходных потока.
Если входные энергетические потоки
суммируются на выходе в один выходной
поток, то такие механизмы следует
называть суммирующими, или интегральными.
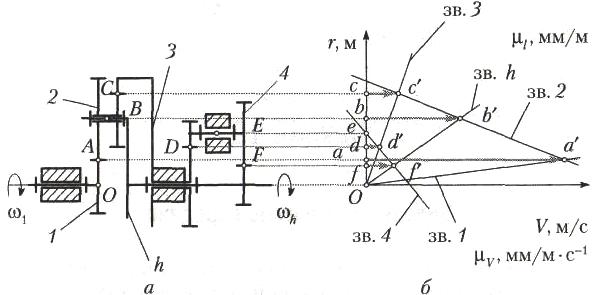
Все рассмотренные типовые схемы планетарных механизмов можно выполнить с двумя степенями свободы. Рассмотрим в качестве примера двухрядный механизм со смешанным зацеплением. Угловые скорости звеньев в каждом из рассматриваемых движений приведены в таблице
|
Звенья Тип движения |
Центральные звенья | |||
|
1 |
2-3 |
4 |
«в» | |
|
Действительное |
ω1 |
ωс |
ω4 |
ωв |
|
Дополнительное |
–ωв |
–ωв |
–ωв |
–ωв |
|
Суммарное |
ω1–ωв |
ωс–ωв |
ω4–ωв |
0 |
По формуле Виллиса отношение угловых
скоростей звеньев для внешнего зацепления
колес
![]() и
и![]() .
.
![]()
для внутреннего зацепления колес
![]() и
и![]()
![]()
Перемножим правые и левые части этих
уравнений с учетом
![]() и получим соотношение между угловыми
скоростями механизма с двумя степенями
свободы
и получим соотношение между угловыми
скоростями механизма с двумя степенями
свободы

Чтобы из механизма с двумя степенями свободы получить одноподвижный механизм, необходимо либо остановить одно из подвижных звеньев, либо связать между собой функционально (например, простой зубчатой передачей) два подвижных звена. Механизмы, образованные по второму способу, называются замкнутыми дифференциалами или дифференциалом с замыкающей цепью. Схема такого замкнутого дифференциального механизма приведена на рис
Для определения передаточного отношения дифференциала с замыкающей цепью его мысленно разбивают на составляющие механизмы: дифференциал и замыкающую цепь. Дифференциал преобразуют в приведенный механизм, применяя метод остановки водила, и составляют уравнение, связывающее угловые скорости трех центральных звеньев дифференциала. Далее составляют уравнение, устанавливающее связь между угловыми скоростями центральных звеньев замыкающей цепи. При этом если замыкающая цепь представляет собой зубчатую передачу с неподвижными осями вращения колес, то уравнение получают непосредственной подстановкой действительных угловых скоростей звеньев, выраженных через радиусы или числа зубьев колес. Если же замыкающая цепь выполнена в виде простого планетарного механизма, то для получения уравнения, связывающего угловые скорости звеньев, простой планетарный механизм преобразуют с помощью метода остановки водила в приведенный, и уже для этого механизма находят передаточное отношение между центральными звеньями, которое затем выражают через радиусы или числа зубьев колес. Искомое передаточное отношение заданного механизма определяют из совместного решения двух полученных уравнений - для дифференциала и для замыкающей цепи.
При определении передаточного отношения графическим способом решение можно начинать с любого звена для простого или сложного планетарного механизма. Исключение составляет замкнутый дифференциал, в котором нельзя задаваться скоростью его свободного звена. Во избежание ошибок можно рекомендовать начинать графическое решение дифференциала с его замыкающей цепи.