

.Проектирование устройств и систем с высокоскоростными соединениями
.pdfУправляющий кадр допускает в своем составе как данные, так и управляющую информацию. Он начинается с 2-битной последовательности 10; 8 бит в поле типа определяют формат 56-разрядной нагрузки. Например, если поле типа содержит значение 0xCC (шестнадцатеричный код), то структура нагрузки имеет вид как на рис. 2.9, где символ с 0-й длиной (Т) – это лишь форма представления, а не реальные биты.
Рис. 2.9. Кадр с кодом типа 0xCC
Схема кодирования насчитывает 15 типов кадров, определяющих «x» байт данных, за которыми следует «у» байт управления или наоборот. К управляющим символам с нулевой длинной относятся такие символы, как:
S (Start) – обозначает начало пакета;
T (Terminate) – обозначает конец пакета.
В качестве примера рассмотрим преобразование данных, поступающих через интерфейс XGMII (10 Gigabit Media Independent Interface), используемый для соединений внутри ИС в код 64b/66b для дальнейшей передачи через интерфейс XFI между ИС. Для передачи XGMII используется 32 линии данных
(TXD(31:0) – 4 байта) и 4 линии управления (TXC(3:0)). Значе-
ние 1 в TXC(i) говорит о том, что i-й байт TXD переносит управляющую информацию. На рис. 2.10 приведен пример передачи короткого кадра XGMII через XFI, где 0х07 (idle), 0xfb (S) и 0xfd
(T) – коды управляющих символов XGMII.
В кодирование 64b/67b введен механизм DC-баланса, так как скремблирование не дает 100-процентной гарантии баланса 0 и 1. Все биты каждого символа, включая бит 66, участвуют в подсчете текущей диспропорции RD. Когда бит 66 устанавливается в 1, биты [63:0] инвертируются. Допустимыми значениями битов синхронизации [66:64] являются следующие:
41

001 – символ данных, нет инверсии;
010 – символ управления, нет инверсии;
101 – символ данных, биты [63:0] инвертируются;
110 – символ управления, биты [63:0] инвертируются.
TXC/TXD |
|
последовательность XGMII |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
F /07070707 |
|
F/07070707 |
|
8/ fbD1 D2 D3 |
0/D4 D5 D6 D7 |
0 |
/D0 D1 D2 D3 |
0/D4 D5 D6 D7 |
1/D1 D2 D3fd |
F/07070707 |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
кадр |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
C0 C1 C2 C3 C4 C5 C6 C7 |
|
|
S0 D1 D2 D3 D4 D5 D6 D7 |
|
|
|
|
|
D0 D1 D2 D3 D4 D5 D6 D7 |
|
|
D0 D1 D2 T3C0 C1 C2 C3 |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
64b/66 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
10 |
|
1E000000 00000000 |
|
10 |
78D1D2D3D4 D5D6 D7 |
|
01 |
|
|
D0D1D2D3D4D5D6D7 |
10 |
B4 D0D1D2 00000000 |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 2.10. Пример передачи короткого кадра XGMII через XFI
Рис. 2.11. Блок-схема алгоритма блокировки границы символа кода 64 B/67 B
На рис. 2.11 приведена блок-схема алгоритма блокировки границы символа кода 64 B/67 B.
42
2.3.КОРРЕКЦИЯ ТАКТИРОВАНИЯ
ИFIFO-БУФЕРЫ, СВЯЗЫВАНИЕ КАНАЛА
Необходимость коррекции тактирования двух взаимодействующих устройств (например, печатных плат) возникает из-за того, что каждое устройство имеет свой задающий генератор со своей уникальной частотой.
Пусть два таких задающих генератора работают на частоте 1 ГГц с точностью 1 ppm (миллионных долей, в нашем случае это + –1000 Гц). Пусть информационный поток для передачи между блоками до сериализации (параллельные данные) возникает с частотой, равной 1/20 от задающей частоты. Следовательно, на приеме может возникнуть погрешность при обработке данных, равная + –1000 · 20 тактов задающего генератора на 1 такт параллельных данных. Принятый поток может оказаться быстрее или медленнее переданного потока на 20 000 тактов за 1 с. Для кода 8b/10b, например, это приведет к вставке/выпадению 20 000 символов каждую секунду (0,02 % символов в секунду: за секунду передается 100 000 000 10-разрядных символов кода 8b/10b). Для предотвращения вставки/выпадения требуется коррекция тактовой частоты.
Есть системы, которые не требуют коррекции. Например, во многих случаях передачу данных между ИС на плате обеспечивает один и тот же задающий генератор. Не требуется коррекция и в случае, когда все схемы на приеме тактируются от выделителя тактовой частоты, поэтому входной FIFO-буфер заполняется и извлекается с одинаковой скоростью. Также не требуется коррекция, когда все опорные тактовые сигналы, предназначенные для передачи, получаются с использованием внешней PLL как источника общего опорного тактового сигнала.
Жесткие требования к джиттеру гигабитного SERDES не позволяют использовать выделенную на приеме тактовую частоту для передачи. Дальнейшая работа с десериализованными данными на приеме, как и передача в обратном направлении, выполняется под воздействием собственного тактового генератора. Поэтому необходима его коррекция, которая основана на введении в передаваемый поток уникального символа или последовательности символов (последовательность коррекции), не встре-
43
чающихся среди данных. В случае кода 8b/10b используется К-символ или упорядоченная пара К-символов, или К-символы в сочетании с символами данных. Коррекция тактовой частоты основана на мониторинге состояния FIFO-буфера приема данных. Полному его заполнению препятствует приходящая вовремя последовательность коррекции тактирования, которая не записывается в FIFO-буфер. Это действие называется отбрасыванием данных. Полному опустошению FIFO-буфера также препятствует приходящая вовремя последовательность коррекции тактирования, которая дважды в него записывается. Это действие называется повтором. Коррекция тактирования должна происходить достаточно часто (хотя это снижает скорость передачи), чтобы операции отбрасывания и повтора надежно компенсировали разницу тактирования на передаче и приеме. Часто последовательность коррекции совпадает с последовательностью пустых (idle) символов.
На стороне передачи используется небольшой FIFO-буфер, если операции записи и чтения являются изохронными (совпадение по частоте, но необязательное совпадение по фазе). В случае когда частоты операций записи и чтения точно не совпадают, используются FIFO-буфер большого размера с постоянным мониторингом его статуса. При заполнении FIFO-буфера он может переполниться (статус перегрузка или overrun). Для предотвращения этого входной поток проверяется на наличие пустых символов. Когда они обнаруживаются, то их записи в FIFO-буфер не происходит. Наоборот, если FIFO-буфер становится пустым (статус недогрузка или underrun), то на сериализацию передается пустой символ, а указатель записи FIFO-буфера не изменяется, что может вызвать повторную передачу холостого символа. Важно отметить, что холостой символ может быть использован и как символ выравнивания, и как последовательность коррекции тактирования на приеме.
Иногда есть необходимость передавать больше данных, чем способно обеспечить последовательное соединение. В этом случае используется несколько соединений, например, так устроен интерфейс XAUI для 10 GbE. Для этого входные потоки должны быть выровнены. Этот процесс называют связыванием канала (channel bonding). Он убирает перекос между двумя или более
44

каналами и представляет пользователю данные так, если бы они передавались по одному последовательному соединению (рис. 2.12). Причинами перекоса между каналами могут быть:
–различная длина путей передачи сигналов;
–активные повторители на путях передачи сигналов;
–различия из-за коррекции тактирования;
–различие во времени выравнивания границ байт.
Рис. 2.12. Пример связывания канала
Следовательно, связывание канала требует взаимодействия между трансиверами (приемопередатчиками). Реализация этого процесса отличается у разных разработчиков, но общим является то, что используется уникальная последовательность выравнивания и назначаются ведущий (master) канал и подчиненные каналы (slave), возможно с синхронизацией от источника.
45

2.4. РЕАЛИЗАЦИЯ ВЫСОКОСКОРОСТНОГО SERDES НА ФИЗИЧЕСКОМ УРОВНЕ
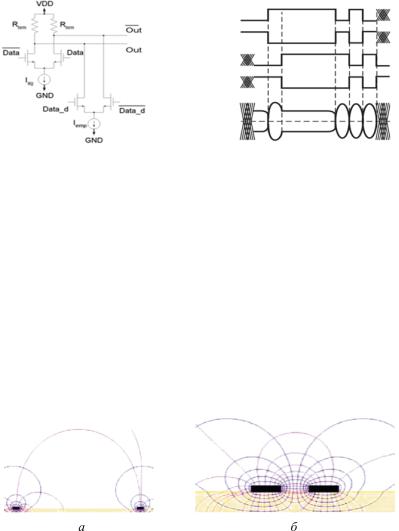
Физическая реализация высокоскоростного SERDES выполняется по дифференциальной схеме передачи сигналов. Предпочтение отдается технологии CML (Current Mode Logic – логические схемы на переключателях тока) – рис. 2.13. Заданный ток I0 (ток источника тока) передатчика (драйвера), протекая через определенную часть переключателя (пары транзисторов)
в зависимости от потенциалов на входах UPMATXP и UPMATXN, обеспечивает постоянное выходное напряжение. Если открыты
оба транзистора, то ток I0 делится пополам для каждой ветви. Если изменять потенциал на одном из затворов, то соответствующий транзистор закроется, а через другой будет протекать полный ток I0. Переключение тока протекает очень быстро, что и требуется для высокоскоростной передачи. Быстрое переключение токов приводит к быстрому изменению потенциалов на выходах TXP pin и TXN pin.
Рис. 2.13. CML-передатчик (TX)/приемник (RX)
Терминальные резисторы для согласования с линией связи могут быть встроенными с возможностью отключения или подключения с нужным значением импеданса (50 или 75 Ом).
Предыскажение (Pre-Emphasis) является важной характеристикой высокоскоростных драйверов и заключается в преднамеренном увеличении выходного напряжения сверх нормы в момент
46

переключения его значения. Превышение действует в течение короткого времени битового интервала. Неопытный глаз воспримет это как неправильную работу схемы. В действительности это объясняется борьбой с межсимвольной интерференцией (ISI – InterSymbol Interference).
ISI возникает, когда последовательный поток данных содержит несколько соседних битовых интервалов с одинаковыми значениями и следующие за ними 1 или 2 интервала с противоположными значениями. Из-за емкости линии связи за небольшой промежуток времени не может выполниться перезаряд линии, что обусловливает уменьшение амплитуды короткого сигнала, а это может привести к его нераспознанию. На рис. 2.14 проиллюстрирована межсимвольная интерференция, а нарис. 2.15 – ее преодоление.
Рис. 2.14. Межсимвольная интерференция
Рис. 2.15. Предыскажение
47
Предыскажение может быть реализовано с использованием двух CML-драйверов, включенных параллельно, как показано на рис. 2.16, и задержкой их переключения.
Рис. 2.16. CML-драйвер с предыскажением и временная диаграмма его работы
При разводке печатной платы с высокоскоростными соединениями становится необходимым использование теории передачи электрических сигналов по дифференциальным линиям связи.
Дорожки печатной платы для дифференциальной пары с согласованным импедансом (полное сопротивление) – это два печатные проводника, прилегающие близко друг к другу. Пространство между дорожками пары не исключает взаимодействие между ними. Взаимодействие называют слабым (рис. 2.17, а), если расстояние между дорожками относительно большое. Взаимодействие называют сильным (рис. 2.17, б), если расстояние между дорожками относительно небольшое.
Рис. 2.17. Слабое и сильное взаимодействие проводников печатной платы
48

Взаимодействие выражается в виде импеданса дорожек. Импеданс зависит от длины дорожек, набора слоев печатной платы и ее материала. Моделирование таких дорожек выполняется с помощью анализатора полей. На рис. 2.18 приведены основные типы дорожек печатной платы с управляемым импедансом. Это микрополосковые линии, полосковые линии, смещенные полосковые линии и полосковые линии со связью по широким стенкам. Их достоинства и недостатки сведены в табл. 2.4.
Рис. 2.18. Дифференциальные дорожки с контролируемым импедансом
Таблица 2 . 4 Достоинства и недостатки дорожек с контролируемым импедансом
Тип |
Достоинства |
Недостатки |
Микро- |
Меньше потерь, чем с внут- |
Только два слоя – верхний |
полосковая |
ренними дорожками |
и нижний. Более чувстви- |
|
|
тельна к помехам |
Полосковая |
Лучшая защита. Больше |
Больше потери амплитуды |
|
возможных слоев |
на дюйм у высокочастотных |
|
|
сигналов, чем в микрополос- |
|
|
ковых линиях |
Смещенная |
Полезна, если необходимо |
Если она используются для |
|
несимметричное наложение. |
сохранения слоев, то область |
|
Может быть использована |
смещения над дорожками |
|
для ограничения числа слоев |
должна быть свободна от |
|
земли и питания |
других дорожек и не должно |
|
|
быть параллельных дорожек |
Со связью |
Очень тесная взаимосвязь |
Трудности в производстве |
по широким |
|
из-за жестких допусков. |
стенкам |
|
Не рекомендуется для высо- |
|
|
коскоростных операций |
|
|
49 |

Устройства для выравнивания (Equalization) характеристик линий передачи высокоскоростных сигналов (эквалайзеры) призваны компенсировать зависимость импеданса и потерь в линиях от частоты. Все методы выравнивания делят на пассивные и активные методы. Рис. 2.19 иллюстрирует процесс выравнивания на примере изменения частотной характеристики линии.
Рис. 2.19. Частотные характеристики линии и эквалайзера
Пассивное выравнивание выполняют пассивные четырехполюсники, частотная характеристика которых дополняет потери при передаче сигналов.
Активное выравнивание выполняют частотно-зависимые усилители/аттенюаторы. Различают фиксированные и самонастраивающиеся активные эквалайзеры. Первые имеют неизменную частотную характеристику, которую может настраивать пользователь в n точках, увеличивая илиуменьшая вних коэффициентусиления.
Самонастраивающийся или обучающийся эквалайзер более сложный. Он анализирует входной сигнал и определяет, какие частоты ослабляются при прохождении по линии передачи. Самонастраивающийся эквалайзер, по сути, является регулятором, т.е. системой с обратной связью. Его работа зависит от характера входящего битового потока. Поэтому часто такие эквалайзеры проектируют для работысо специфическимтипом линейногокодирования.
Самонастраивающийся эквалайзер преимущественно подходит для соединений с переменной длиной кабеля или объединительных печатных плат со значительным различием в расположении установочных позиций.
Фиксированный эквалайзер более подходит для случаев без вариаций, таких как соединения между микросхемами, сбалансированные объединительные печатные платы.
50