

Электротехника и электроника
..pdfдует увеличивать Е за счет увеличения iв. Регулирование величины выходного напряжения осуществляется изменением величины токав обмотке возбуждения.
Изменение полярности целесообразно производить изменением направления тока в обмотке возбуждения.
Принцип действия генератора с параллельным возбужде-
нием. При вращении якоря в начальный момент присутствует только остаточный магнитный поток, который вызывает небольшую остаточную ЭДС (Е0). Под влиянием ее появляется ток возбуждения, создающий магнитный поток, который складывается с остаточным. Увеличиваются результирующий магнитный поток, ЭДС, iв и т.д., пока генератор не выйдет на установившийся режим.
Условия самовозбуждения генератора:
1.Наличие остаточного магнитного потока.
2.Магнитный поток обмотки возбуждения и остаточный магнитный поток должны быть направлены согласно.
3.Суммарное сопротивление цепи возбуждения должно быть меньше критического.
3.3.7. Двигатели постоянного тока
Диаграмма, поясняющая принцип действия двигателя постоянного тока, имеет вид
Под воздействием приложенного напряжения по обмоткам якоря и возбуждения протекают токи. Ток возбуждения создает магнитный поток. На проводники якоря с током в магнитном поле действует сила, заставляющая якорь вращаться.
111
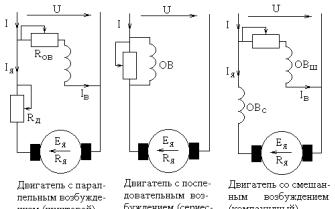
На рис. 3.51 представлены схемы включения двигателей, где Rо.в – сопротивления в цепи обмотки возбуждения; Rд – добавочное сопротивление в цепи якоря; ОВс и ОВш – сериесная и шунтовая обмотки возбуждения.
Классификация двигателей по способу подключения обмоткивозбуждения:
–двигатели независимого возбуждения (ДНВ);
–двигатели с параллельным возбуждением, шунтовые
(рис. 3.51, а);
–двигатели с последовательным возбуждением, сериес-
ные (рис. 3.51, б);
–двигатели со смешанным возбуждением, компаундные
(рис. 3.51, в).
|
|
|
|
|
|
|
U |
|
|
|
|
|
|
|
|
|
|
|
|
|
U |
|
|
|
|
|
|
|
|
U |
|
|
|
|
|
|
||||||
|
I |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I |
|
|
|
|
|
|
|
I |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Rо.в |
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
Ro.в |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
ОВ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ОВ |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
I |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ОВш |
|
|||||||||||||||||
|
|
|
|
|
|
|
Iя |
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
я |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Rо.в |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Iв |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ОВс |
|
|
|
|
|
|
в |
|
||
|
|
|
|
Rд |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Eя |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
E |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
E |
|
||||||||||||
|
|
|
|
|
|
|
|
|
я |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
я |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
Rя |
|
|
|
|
|
|
|
|
|
Rя |
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
я |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
б |
|
|
|
|
|
|
в |
||||||||||||||||||
Рис. 3.51. Схемы включения шунтового (а), сериесного (б) и компаундного (в) двигателей
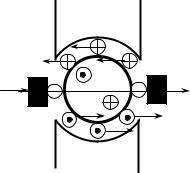
ПротивоЭДС в двигателе. При направлении тока, указанном на рис. 3.52, якорь будет вращаться против часовой стрелки (правило левой руки).
Индуцируемая ЭДС будет направлена против тока (правило правой руки).
112
|
N |
|
|
F |
F |
|
F |
|
Iя |
E |
I я |
|
E |
|
|
F |
F |
|
S |
F |
|
|
Рис. 3.52. Направление тока и ЭДС в обмотке якоря
В двигателях ЭДС направлена против тока и поэтому называется противоЭДС.
На основании второго закона Кирхгофа для якорной цепи имеем уравнение электрического равновесия для двигателя
Eя = −Iя (Rя + Rд ) + U ,
из которого находим
U = Eя + Iя (Rя + Rд ) .
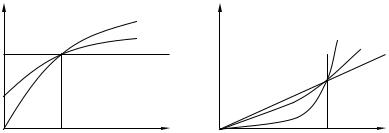
Зависимость магнитного потока и момента от тока якоря в двигателе. У шунтового двигателя машины Ф = const, так как iв не зависит от Iя. У сериесного двигателя Ф создается током якоря.
У компаундного двигателя зависимость Ф = f (Iя) занимает промежуточное положение между зависимостью для сериесного и шунтового двигателей. При Iя > Iн максимальный поток у сериесной машины.
Используя выражение для момента M = CмIяФ для шунтовой машины получаем M = C1Iя , так как Ф = const . Для сериесной машины, учитывая, что Ф = kIa (начальный участок зависимости (рис. 3.53, а)), получаем M = CмIяkIя = k1Iя2 . Зависимость
M = f (Iя) у компаундного двигателя занимает промежуточное положение между этойже зависимостью для сериесного и шунтового двигателей. При перегрузке ( Iя > Iн ) максимальный момент –
у сериесного двигателя, поэтому он обладает наибольшей перегрузочной способностью.
113
Ф |
1 |
M |
|
|
2 |
1 |
3 |
2 |
3 |
Iн |
I я |
Iн |
I я |
|
а |
б |
|
Рис. 3.53. Зависимость магнитного потока (а) и момента (б) от тока якоря (1 – сериесный двигатель; 2 – компаундный; 3 – шунтовой)
Механическая характеристика ДТП (рис. 3.54). Исполь-
зуя соотношения
|
|
|
|
|
|
E = U − Iя (Rя + Rд ), |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
E = CE nΦ, |
|
|||
|
|
|
|
|
|
|
= CM IяΦ, |
|
||
|
|
|
|
|
|
M |
|
|||
получаем n = |
|
U |
|
− |
Iя (Rя + Rд ) |
– электромеханическая ха- |
||||
CE Ф |
|
|
||||||||
|
|
|
|
CE Ф |
|
|||||
рактеристика; |
|
|
M (Rя |
+ Rд ) |
|
|
||||
n = |
U |
|
− |
– механическая характеристика. |
||||||
CE Ф |
|
|
|
|||||||
|
|
|
|
CM CE Ф2 |
|
|||||
Особенностью сериесных двигателей является то, что при M → 0 ток якоря и Ф тоже стремятся к нулю, а n стремится к бесконечности. Поэтому эти двигатели нельзя оставлять работать вхолостую.
114
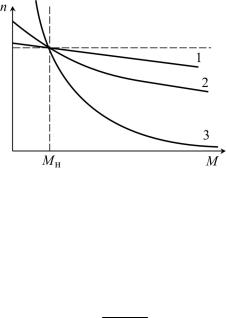
Рис. 3.54. Механическиехарактеристики двигателей: 1 – шунтовой; 2 – компаундный; 3 – сериесный
Пуск ДТП. Проблемы пуска:
1. Большой пусковой ток якоря Iя.п. Из уравнения электрического равновесия для якорной цепи имеем
Iя = U − E .
Rя + Rд
Пусть R = 0 при |
(n = 0) (E = 0) , тогда |
I |
|
= |
U |
= |
я.п |
|
|||||
д |
|
|
|
Rя |
|
|
|
|
|
|
|
|
=10…30 Iя.н.
2.Тяжелые условия коммутации, связанные с большими
пусковыми токами.
3. Большой пусковой момент, который приводит к ударной нагрузке на исполнительный механизм во время пуска.
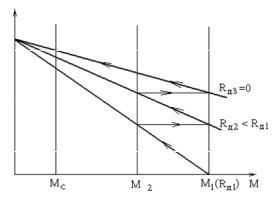
Самый распространенный способ пуска – введение в цепь якоря добавочных сопротивлений Rд (реостатный пуск). За счет введения Rд уменьшается пусковой ток и пусковой момент. На рис. 3.55 изображены механические характеристики, иллюстрирующие процесс пуска (М1 и М2 – заданные пределы изменения момента при пуске; Мс – момент сопротивления механизма).
115
n
|
|
|
|
|
|
|
|
|
|
|
|
|
Rд3 = 0 |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
Rд2 < Rд1 |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Rд1 |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
Mс |
|
|
|
|
|
|
|
M1 |
|
|
M |
|
|
|||||||||
|
|
|
M2 |
|
|
||||||||||||||||||
|
Рис. 3.55. Реостатный пуск |
|
|
|
|
|
|
|
|||||||||||||||
Способы регулирования скорости двигателей постоянно- |
|||||||||||||||||||||||
го тока. Из выражения n = |
|
U |
− |
M (Rя + Rд ) |
|
вытекают три |
|||||||||||||||||
C |
Ф |
|
C C |
Ф2 |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
E |
|
|
|
|
м E |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
способа регулирования скорости:
1)за счет изменения питающего напряжения при неизменном магнитном потоке;
2)введением в цепь якоря добавочных сопротивлений;
3)изменением магнитного потока.
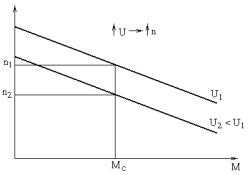
1. Регулирование скорости изменением питающего напряжения при неизменном магнитном потоке.
Механические характеристики при регулировании скорости изменением питающего напряжения имеют вид, представленный на рис. 3.56. Анализируя выражения, описывающие ток, ЭДС и момент:
|
E = CE nФ; |
|||
|
M = CM IяФ; |
|||
|
||||
|
|
|
− E |
|
|
Iя = |
U |
||
|
|
|
, |
|
|
|
|||
|
|
Rя + Rд |
||
116
n
|
|
|
↑ U →↑ |
n |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
n1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U1 |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||||
n2 |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
U2<U1 |
||||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
Mс |
|
|
|
|
|
M |
|
|
|
|
|
|
|
|
|
|
|
|
|||
Рис. 3.56. Регулирование скорости изменением U
приходим к выводу, что уменьшение напряжения приводит к уменьшению скорости.
↓ U→↓ →↓Iя → M в < (M в→↓ |
M→↓ с )→ n E |
↑ Iя→↑ M→ в =(M в |
M с )n=n2 . |
Метод позволяет регулировать скорость плавно и в широких пределах.
2. Регулирование скорости путем введения в цепь якоря добавочного сопротивления Rд (рис. 3.57). Из представленных выше выражений следует, что введение в цепь якоря сопротивления Rд приводит к изменению скорости.
↑ Rд→↓ |
→↓Iя →↓ M→↓в → |
n E |
||
↑ Iя→↑ |
M→ в =(M в |
M с ) |
|
n2 . |
|
||||
Метод позволяет плавно регулировать скорость в сторону ее уменьшения от исходной.
Недостаток метода – большие потери энергии в добавочном сопротивлении.
117
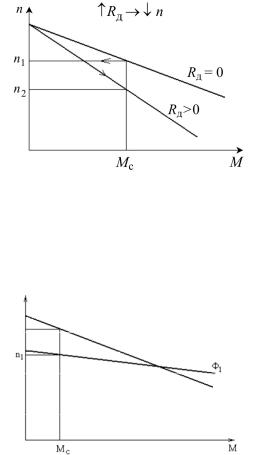
Рис. 3.57. Регулирование скоростивведениемRд
3. Регулирование скорости за счет уменьшения магнитного потока. На рабочем участке механических характеристик
↓ Ф→↑ n (рис. 3.58).
n
n2
n1 |
|
|
|
|
Ф1 |
||
|
Ф2<Ф1
Mс |
|
M |
|
|
Рис. 3.58. Регулирование скорости изменением Ф
Метод позволяет плавно регулировать скорость в сторону ее увеличения.
Вывод: двигатели постоянного тока позволяют осуществлять плавную регулировку скорости в широких пределах сравнительно с простыми способами, что является их основным достоинством.
118
Общие сведения о режимах торможения
1.Торможение противовключением: двигатель принудительно вращается в сторону, противоположную к Мвр.
2.Генераторное торможение: двигатель принудительно вращают со скоростью > n0.
3.Динамическое торможение: двигатель отключается от сети, якорь замыкается на сопротивление. Согласно принципу Ленца в якоре, вращающемся по инерции, индуцируется ток, вызывающий тормозной момент.
Для реверсирования двигателя необходимо изменить направление тока либо в обмотке возбуждения, либо в якоре. Одновременное изменение токов в обмотке возбуждения и в якоре не приводит к реверсу двигателя. Это позволяет создавать коллекторные двигатели, работающие как в цепях постоянного тока, так и в цепях переменного тока.
Общие сведения об универсальном коллекторном двига-
теле. Двигатель может работать как на постоянном, так и на переменном токе.
Особенности данного двигателя:
1.Двигатель делают с последовательной обмоткой возбуждения, чтобы не было сдвига фаз между Iя и Ф.
2.Поскольку двигатель работает в цепи переменного тока, то магнитный поток тоже переменный, и для уменьшения потерь на вихревые токи сердечники полюсов делают шихтованными.
Преимущество коллекторного двигателя по сравнению
сасинхронным – возможность получения скорости более 3000 об/мин для сети переменного тока стандартной частоты.
Недостатки – малый КПД и плохая коммутация.
Тесты по теме «Машины постоянного тока»
1. Коллектор – это
1) |
часть статора; |
2) часть якоря; |
3) |
часть полюсов; |
4) часть корпуса. |
Укажите правильный ответ.
119

2.Какая из представленных зависимостей является механической характеристикой двигателя постоянного тока с параллельным возбуждением? Укажите правильный ответ.
3.Одним из условий самовозбуждения генератора с параллельным возбуждением является:
1) наличие дополнительного источника питания;
2) наличие добавочных полюсов;
3) наличие остаточного магнитного потока.
Укажите правильный ответ.
4.Какой из двигателей постоянного тока обладает наибольшейперегрузочной способностью? Укажитеправильный ответ.
1) с независимым возбуждением;
2) с параллельным возбуждением;
3) с последовательным возбуждением;
4) со смешанным возбуждением.
5.Что такое регулировочная характеристика генератора постоянного тока? Укажите правильный ответ.
1) I = f (U ) ; 2) iв = f (Iя ) ; 3) U = f (Iя ) ; 4) Iя = f (iв ) .
6. Для чего служит обмотка возбуждения в генераторе постоянного тока? Укажите правильный ответ.
1)для приведения в движение;
2)для создания магнитного потока;
3)для связи с коллектором;
4)для крепления полюсов к корпусу.
120