

Машины и оборудование для разработки мерзлых грунтов
..pdfКинетическая энергия системы
T |
1 |
|
2 |
|
1 |
Ix |
2 |
|
1 |
|
2 |
vx |
1 |
|
2 |
|
1 |
|
2 |
|
2 |
2 |
, |
(78) |
||
|
my |
|
|
|
|
mv |
|
|
mx |
|
|
mR |
|
|
|
|
x |
|
||||||||
2 |
|
2 |
|
2 |
|
2 |
|
4 |
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6A |
|
|
|
|
||||||
где Iх – момент инерции гидроцилиндра активизатора зубьев ковша;
т– суммарная масса колеблющихся звеньев. Потенциальная энергия системы
W 12 cx2 ,
где с – жесткость пружины (считаем, что жидкость несжимаема). Диссипативная функция Релея
|
1 |
|
2 |
|
1 |
|
2 |
|
2 |
|
1 |
|
|
|
2 |
|
2 |
|
2 |
|
|
D |
|
h x |
|
|
|
h |
|
R |
|
|
|
h |
h R |
|
|
|
|
x |
|
, |
|
2 |
|
2 |
|
2 |
|
|
|
||||||||||||||
|
1 |
|
|
2 |
|
|
|
|
|
1 |
2 |
|
|
6A |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где h1 и h2 – коэффициенты диссипации, учитывающие потери энергии в уплотнении и резьбе.
Уравнение движения зуба при синхронности возвратнопоступательного и вращательного движения зуба имеет вид
|
|
1 |
|
2 |
|
|
2 |
|
|
|
m 1 |
|
|
R |
|
|
|
|
x h |
||
|
|
|
||||||||
|
|
2 |
|
|
|
6A |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
2 |
|
|
|
h2 R |
|
|
|
|
x cx F P(t) P01 |
, |
|
|
|||||
|
|
|
6A |
|
|
|
|
|
|
|
|
|
|
где m – суммарная масса колеблющихся звеньев;
h1 – коэффициент диссипации системы, учитывающий потери в уплотнении в шлицевом соединении при возвратно-посту- пательном движении;
h2 – коэффициент диссипации системы, учитывающий потери в уплотнении и в шлицевом соединении при вращательном движении;
c – коэффициент жесткости пружины; R – радиус поршня;
А – амплитуда колебаний зуба;
F – тяговое усилие, создаваемое гидроцилиндрами ковша, стрелы или одновременно ковша и стрелы;
121
P(t) – усилие, создаваемое гидроцилиндрами активизатора зуба ковша: при подаче давления в гидроцилиндр активизатора зуба P(t) = Р; при отсутствии давления в нем P(t) = 0;
P01 – сила сопротивления грунта: при контакте зубьев с грунтом P01 = P01; при отсутствии контакта P01 = 0.
Явлениями запаздывания импульсов давления в трубопроводе можно пренебречь и полагать распространение давления мгновенным.
6.3.1. Определение составляющих уравнения движения зуба
Как было сказано выше, оптимальное уравнение движения зуба имеет вид
|
|
1 |
|
2 |
|
2 |
|
|
|
|
2 |
|
2 |
|
|
|
||
m 1 |
|
|
R |
|
|
|
|
x h |
h R |
|
|
|
|
x cx F P(t) P |
, |
|||
|
|
|
|
|
||||||||||||||
|
|
2 |
|
|
|
6A |
|
|
1 |
2 |
|
|
6A |
|
01 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где m – суммарная масса колеблющихся звеньев, т = 1,1 кг; R – радиус поршня, R = 0,025 м;
А – амплитуда колебаний зуба, А = 0,5S = 0,003 м (S – ход поршня,
S = 0,006 м);
с – коэффициент жесткости пружины.
Для нахождения коэффициента жесткости пружины с необходимо найти усилие на пружину гидроцилиндра:
Pпр = 2Р1 + Р2 + Р3,
где P1 – сила трения в уплотнениях поршней, P1 = π D qf = = 3,14 · 0,05 · 1000 · 0,25 = 39,27 Н (D – диаметр поршня,
D = 0,05 м; q – контактное давление для подвижных уплотнений, q = 1000 Н/м; f – коэффициент трения, f = 0,25);
Р2 – усилие на выталкивание рабочей жидкости из гидроцилиндра, |
|
Р2 = р F = 0,84 · 106 · 78,5 · 10–6 = 66 Н (Δр – потери давле- |
|
ния в трубопроводе; примем |
р = 6 % от номинального дав- |
ления в трубопроводе, т.е. |
р = 0,84 МПа; F – поперечное |
сечение трубопровода, F |
d |
2 |
|
3,14 0,012 |
78,5 106 м2 , |
4 |
|
4 |
|||
|
|
|
|
d – диаметр трубопровода, d = 10 мм); Р3 – сила трения в резьбе гайки.
На рис. 59 (угол подъема резьбы ψ = 45°)
122
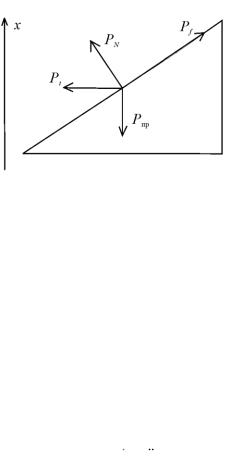
Pfx |
Pпр |
|
, |
1/ f 1 |
|||
где Рпр – усилие на пружину; ориентировочно при-
мем Рпр на 10 % больше 2Р1 + Р2, т.е.
Рпр = (2Р1 + Р2) 1,1 = = (2 · 39,27 + 66)1,1 =
= 160 Н,
|
Pfx |
160 |
|
14,5 H , |
Рис. 59. Схема к определению усилия Рпр |
|
|
||
1/ 0,1 1 |
||||
P3 Pfx 14,5 H ,
Pпр = 2Р1 + Р2 + Р3 = 2 · 39,97 + 66 + 14,5 = 159,04 Н,
с = Рпр/ x = 159,04/0,012 = 13 250 H/м,
где x – деформация пружины, x = 0,012 м = 12 мм; примем с =
= 15 000 Н/м.
Коэффициент диссипации, учитывающий потери в уплотнении при поступательном движении поршня и потери, возникающие между торцом гайки и поршнем,
|
|
|
|
|
|
|
P |
P |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
h |
1 |
|
2 |
|
|
39, 27 |
15, 27 54,54 H c/м , |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
1 |
|
|
v1 |
v2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
где Р1 – сила трения в уплотнении, Р1 = 39,27 Н; |
|
|
|||||||||||||||||||||
Р2 – сила трения между торцом гайки и поршнем, |
|
||||||||||||||||||||||
P2 |
|
|
|
M |
|
|
|
|
|
|
|
|
0,28 |
|
|
15,27 H , |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
2 |
(r |
|
r ) r |
|
|
|
2 |
(0,02 0,015) 0,015 |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
1 |
|
|
|
|
|
|||||||||||||
|
|
|
3 |
2 |
|
1 |
|
|
|
|
|
3 |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где М – момент трения между торцом гайки и поршнем, |
|
||||||||||||||||||||||
M |
2 |
|
|
|
r3 |
r3 |
|
|
|
2 |
|
|
|
0,1 |
0,023 |
0,0153 |
0,028 |
H м, |
|||||
|
P f |
|
2 |
1 |
|
|
|
|
|
159,04 |
|
|
|
||||||||||
|
r2 |
r2 |
|
|
|
|
0,022 |
0,0152 |
|||||||||||||||
|
3 |
|
пр |
|
|
|
|
3 |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
2 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
123

где r1, r2 – внешний и внутренний радиус поверхности трения, r1 =
= 0,015 м, r2 = 0,02 м;
f – коэффициент трения, f = 0,1; v1 , v2 – единичные скорости.
Коэффициент диссипации, учитывающий потери в резьбе,
h2 Pt / v1 1,6 Н c/м ,
где Pt – движущая сила в резьбовом соединении,
|
|
|
|
|
|
|
|
|
|
Pfx |
14,5 |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
Pt |
|
|
|
|
|
|
1,6 H ; |
|
|
|
||||||
|
|
|
|
|
|
1/ f |
1 |
1/ 0,1 1 |
|
|
|
|||||||||||
v1 – единичная скорость. |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Представим уравнение движения зуба в виде |
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
ах + bx + cx = R(t), |
|
|
|
|
||||||||
где |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
2 |
π |
2 |
|
1 |
|
2 |
|
|
3,14 |
|
2 |
|
||||||
a m 1 |
|
|
|
|
1,1 1 |
|
|
|
11,57 кг , |
|||||||||||||
|
|
R |
|
|
|
|
|
|
|
|
0,025 |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
2 |
|
|
|
|
6A |
|
|
|
2 |
|
|
|
|
6 |
0,003 |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b h1 h2 R |
2 |
π 2 |
54,54 1,6 |
2 |
|
|
3,14 |
2 |
85 H c/м , |
|||||||||||||
|
|
|
|
0,025 |
|
|
|
|
|
|
||||||||||||
|
|
|
6 |
|
|
|||||||||||||||||
|
|
|
|
6A |
|
|
|
|
|
|
|
|
|
0,003 |
|
|
||||||
с = 15 000 Н/м,
R(t) = F + P(t) – Р01 .
Для удобства уравнение движения разделим на а и получим:
х + b/ах + с/ах = R(t)/a.
Введем обозначения:
2n b / a 85/11/ 57 7,35 c 1 ,
2 c / a ,

 c / a
c / a 
 15 000/11,57 36 c 1 ,
15 000/11,57 36 c 1 ,

 2 n2
2 n2 
 362 3,6752 38,82 c 1 ,
362 3,6752 38,82 c 1 ,
124
где ω – частота собственных колебаний системы;
δ – демпфированная частота собственных колебаний системы.
х + 2 п х ω2 х = R0 .
Период собственных колебаний
T* |
|
|
2 |
|
|
|
2 3,14 |
|
0,175 c . |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
||||
|
1 (n / )2 |
36 1 (3,675/ 36)2 |
||||||||
|
|
|
|
|
||||||
6.3.2. Определение времени рабочего цикла |
||||||||||
Активизатором |
|
зуба ковша |
является гидроцилиндр, который |
|||||||
и обеспечивает возвратно-поступательное и вращательное движение зуба. Возвратно-поступательное движение зуба реализуется за счет хода штока гидроцилиндра под действием давления рабочей жидкости
в одну сторону и силой упругости пружины в другую сторону. Подача жидкости в бесштоковую полость гидроцилиндра осуществляется посредством насоса НШ-32 через золотниковый гидрораспределитель.
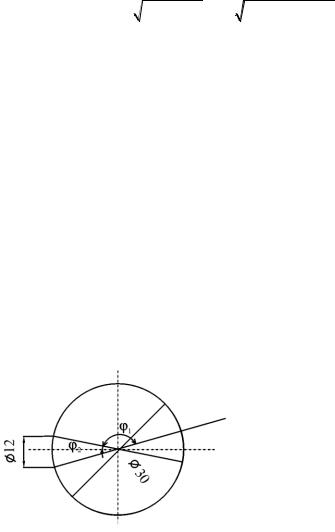
На схеме (рис. 60) упрощенно показано поперечное сечение золотникового распределителя. Отверстие диаметром 12 мм играет роль канала для подачи рабочей жидкости в гидроцилиндр. Это является нерациональным решением, т.к. во время работы гидроцилиндра существенно мало по сравнению со временем, когда гидроцилиндр является запертым, а это отрицательно сказывается на эффективности работы всего ковша в целом. После конструктивной доработки жидкость будет подаваться через сектор с углом φ1 = 2,3185 рад, а запираться гидроцилиндр будет сектором с углом φ2 = π – φ1 = 0,823 рад.
|
Ниже будет рассмотрена |
||
|
кривая движения зуба, а пока, |
||
|
забегая вперед, скажем, что |
||
|
наибольшая |
эффективность |
|
|
с точки зрения установленной |
||
|
на экскаваторе гидроаппарату- |
||
|
ры будет достигнута при рабо- |
||
|
те насоса НШ-32 на номиналь- |
||
|
ной частоте вращения и, сле- |
||
Рис. 60. Поперечное сечение золотникового |
довательно, |
при номинальной |
|
подаче Qн = 55,6 · 10–3 м3/мин. |
|||
распределителя |
|||
125
Время выдвижения штока гидроцилиндра можно найти следующим образом:
|
|
V m |
|
11,78 10 6 |
2 60 |
|
||
t1 |
|
ц |
|
|
|
|
0,0276с , |
|
Q |
|
55,6 10 3 |
0,92 |
|||||
|
|
н |
Vн |
|
|
|
|
|
где Qн – номинальная подача насоса НШ-32, Qн = 55,6 · 10–3 м3/мин; ηVн – объемный КПД насоса НШ-32, ηVн = 0,92;
т – количество одновременно работающих гидроцилиндров, т = 2; Vц – рабочий объем бесштоковой полости гидроцилиндра,
V D2 |
S |
3,14 0,052 |
0,006 11,78 10 6 м3 |
, |
|
|
|||||
ц |
4 |
4 |
|
|
|
|
|
|
|||
(D – диаметр гидроцилиндра, D = 0,05 м; S – ход штока |
гидроцилин- |
||||
дра, S = 0,006 м). |
|
|
|
|
|
Частота вращения золотникового распределителя |
|
||||
1 / t1 2,3185/ 0,0274 84 c 1 или п = 810,8 об/мин.
Время рабочего цикла (движение вперед и небольшая задержка штока)
tц = π/ω = 3,14/84 = 0,037 с.
6.3.3. Решение уравнения движения зуба
Как уже было сказано выше, перемещение зуба можно записать в виде
y(t) = vt + x(t),
где y(t) – координата перемещения зуба относительно экскаватора;
v – скорость движения ковша экскаватора относительно грунта; x(t) – координата перемещения зуба относительно ковша;
t – время.
Одна из главных задач данной работы – найти x(t).
Так как полученное дифференциальное уравнение неоднородное, то
x(t) = xl(t) + x2(t),
где x1(t) – общее решение; x2(t) – частное решение.
126

Общее решение дифференциального уравнения движения зубьев относительно ковша экскаватора:
x 2nx 2 x 0 .
Характеристическое уравнение данного дифференциального уравнения будет иметь вид
2 2n 2 0 .
Корни характеристического уравнения
1,2 n 
 2 n2 .
2 n2 .
Так как в нашем случае п < ω, то общее решение будет иметь вид
x1(t) e nt (C1 cos( t) C2 sin( t)) ,
где С1 и С2 – постоянные интегрирования, находятся из граничных условий.
Частное решение дифференциального уравнения движения зубьев относительно ковша экскаватора имеет вид интеграла Дюамеля:
|
|
x2 (t) t1 R( )Y (t )d , |
(79) |
|||
|
|
|
|
|
0 |
|
где Y – реакция системы на единичный импульс; |
|
|||||
– бесконечно малое смещение. |
|
|||||
Реакцию Y можно представить в виде |
|
|||||
|
Y (t) (a ) 1e nt sin (t) . |
|
||||
Получим |
|
|
|
|
|
|
|
|
e |
nt |
t |
|
|
x (t) |
|
|
R( )en sin( (t ))d . |
|
||
a |
|
|||||
2 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
127

Мы имеем случай внезапной нагрузки: R (t) = 0 при t < 0; R (t) =
= R при t ≥ 0. Вынося R за знак интеграла, интегрируя и учитывая, что
δ2 + n2 = w2, a aw2 = с, имеем
x2 (t) R e nt ( cos( t) n( t)) .
c
Таким образом, дифференциальное уравнение движения зубьев относительно ковша экскаватора имеет решение
x(t) e nt C1 cos t C2 sin t |
R |
|
n |
|
|
|
|
1 |
e nt cos t |
|
sin t . |
(80) |
|
|
|
|||||
|
c |
|
|
|
||
6.3.4. Графическая интерпретация процесса копания
Графическая интерпретация процесса копания. В п. 6.3.3 полу-
чено решение дифференциального уравнения движения зубьев относительно ковша – формула (80).
Движение зубьев относительно экскаватора
y(t) = vt + x(t),
где v – скорость резания.
Процесс перемещения зуба можно разбить на четыре этапа.
1 этап: внедрение зуба в грунт за счет силы тяги экскаватора и работы активизатора зуба (напорная полость распределителя активизатора зуба совпадает с трубопроводом, ведущим к гидроцилиндру). То есть закон движения на первом этапе имеет вид
y(t) = v t + x (t).
Граничные условия (для относительного движения):
x(0) = 0 |
| |
x(t1)= A |
х'(0) = 0 |
| |
x' (t1) = 0. |
Из граничных условий находим С1 и С2:
С1 = 0,
|
|
A |
R |
1 e nt1 |
cos( t ) |
n |
sin( t ) |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
1 |
|
1 |
|
|
|
C2 |
|
|
c |
|
|
|
|
. |
(81) |
||
|
|
e nt1 sin( t ) |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
1 |
|
|
|
|
|
128
2 этап: внедрение зуба в грунт за счет силы тяги экскаватора (напорная полость распределителя активизатора зуба не совпадает с трубопроводом, ведущим к гидроцилиндру). То есть закон движения на втором этапе имеет вид
y(t) = v t + A.
Хотя внедрение зуба в грунт происходит только за счет силы тяги экскаватора, в силу специфики разрушения мерзлого грунта этот участок не слишком опасен, т.к. возможен скол.
3 этап: обратный ход зуба при относительном движении (сливная полость распределителя активизатора зуба совпадает с трубопроводом, ведущим к гидроцилиндру). То есть закон движения на втором этапе имеет вид
y(t) = vt + x(t).
Из граничных условий находим С1 |
и С2: |
|
C1 1 / , |
C2 2 / , |
|
где = a11a22 – a21a12, 1 = b1a22 – b2a12, |
2 = a11b2 – a21b1, a11 = cos (δt2), |
|
a12 = sin(δt2), a21 = cos (δt3), a22 = sin (δt3), b1 = A, b2 = 0.
4 этап: зуб движется только за счет переносного движения. То есть закон движения на втором этапе имеет вид
y(t) = vt.
На рис. 61 показано перемещение зуба при скорости резания v = 0,8 м/с.
Зависимость скорости резания от амплитуды колебания.
По А.Н. Зеленину,
v |
4 |
Ank , |
(82) |
|
3 |
||||
|
|
|
где А – амплитуда колебаний, м; п – частота колебаний, Гц;
k – коэффициент, определяемый экспериментально.
129

Рис. 61. График перемещения зуба ковша экскаватора
Но эта формула хорошо работает при высоких частотах. Выведем формулу несколько измененного вида:
v |
A |
k, |
(83) |
|
|||
|
|
|
|
где А – амплитуда колебаний, м; ω – угловая частота колебаний, с–1.
Для нашего случая при ω = 84 с–1, А = 0,003 м скорость резания
v= 0,08 м/с.
6.4.Определение усилия и скорости резания грунта
ковшом экскаватора
При вибрационном разрушении мерзлых грунтов ковшом силу резания можно определить по формуле А.Н. Зеленина [11]:
|
|
|
90o α |
|
|
||
P |
chg(1 0,55b) 1 |
|
|
|
, |
(84) |
|
o |
|||||||
01 |
|
|
|
|
|
||
|
|
|
150 |
|
|
|
|
где Р01 – усилие резания, Н; с – число ударов плотномера ДорНИИ, с = 290 для глины при
влажности ω = 31 %, при температуре грунта –15 °С; h – глубина резания, см;
b – ширина зуба, b = 10 см;
g – ускорение свободного падения; α – угол резания, α = 18°;
130