

Структурный анализ и синтез механизмов
..pdfМинистерство образования и науки Российской Федерации
Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования «Пермский национальный исследовательский политехнический университет»
А.В. Шафранов
СТРУКТУРНЫЙ АНАЛИЗ И СИНТЕЗ МЕХАНИЗМОВ
Утверждено Редакционно-издательским советом университета
в качестве учебного пособия
Издательство Пермского национального исследовательского
политехнического университета
2012
УДК 621.01-047.84(075.8) Ш30
Рецензенты:
канд. техн. наук В.К. Флегентов (ОАО «Новомет», г. Пермь);
канд. техн. наук, профессор А.Е. Кобитянский (Пермский национальный исследовательский политехнический университет)
Шафранов, А.В.
Ш30 Структурный анализ и синтез механизмов : учеб. пособие / А.В. Шафранов. − Пермь : Изд-во Перм. нац. исслед. политехн. ун-та,
2012. − 69 с.
ISBN 978-5-398-00942-2
Рассмотрены основные теоретические вопросы исследования строения существующих и проектирования новых структурных схем механизмов. Приведены контрольные вопросы и задания для усвоения изучаемых материалов.
Предназначено для подготовки студентов технических специальностей вузов по направлениям «Машиностроение», «Конструкторско-технологическое обеспечение машиностроительных производств», «Технологические машины и оборудование», «Оборудование и агрегаты нефтегазового производства», «Нефтегазовое дело» и др.
УДК621.01-047.84(075.8)
ISBN 978-5-398-00942-2 |
© ПНИПУ, 2012 |
ОГЛАВЛЕНИЕ |
|
ПРЕДИСЛОВИЕ................................................................................................................................. |
4 |
1. ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ ТЕОРИИ |
|
МЕХАНИЗМОВИ МАШИН........................................................................................................... |
5 |
1.1. Понятия машины и механизма.................................................................................. |
5 |
1.2. Звенья механизмов и их виды ................................................................................... |
8 |
Контрольные вопросы .................................................................................................... |
11 |
2. КИНЕМАТИЧЕСКИЕ ПАРЫ ИЦЕПИ.................................................................................... |
12 |
2.1. Кинематические пары и их классификация........................................................... |
12 |
2.2. Кинематические соединения................................................................................... |
20 |
2.3. Кинематические цепи и их классификация............................................................ |
21 |
Контрольные вопросы .................................................................................................... |
22 |
3. ОСНОВНЫЕ ВИДЫМЕХАНИЗМОВ..................................................................................... |
23 |
3.1. Классификация механизмов.................................................................................... |
23 |
3.2. Рычажные механизмы.............................................................................................. |
24 |
3.3. Кулачковые механизмы ........................................................................................... |
27 |
3.4. Зубчатые механизмы................................................................................................ |
29 |
3.5. Механизмы прерывистого движения...................................................................... |
30 |
Контрольные вопросы .................................................................................................... |
31 |
4. ПОДВИЖНОСТЬ МЕХАНИЗМОВ.......................................................................................... |
32 |
4.1. Структурная формула кинематической цепи......................................................... |
32 |
4.2. Подвижность пространственных механизмов....................................................... |
33 |
4.3. Подвижность плоских механизмов......................................................................... |
36 |
4.4. Избыточные и пассивные связи.............................................................................. |
40 |
4.5. Лишние степени свободы ........................................................................................ |
43 |
Контрольные вопросы .................................................................................................... |
45 |
Задания............................................................................................................................. |
46 |
5. СТРУКТУРА МЕХАНИЗМОВ.................................................................................................. |
48 |
5.1. Заменяющие механизмы.......................................................................................... |
48 |
5.2. Структурный синтез механизмов по Ассуру– Артоболевскому.......................... |
51 |
5.3. Структурный анализ механизмов ........................................................................... |
61 |
Контрольные вопросы .................................................................................................... |
65 |
Задания............................................................................................................................. |
66 |
СПИСОК РЕКОМЕНДУЕМОЙ ЛИТЕРАТУРЫ........................................................................ |
68 |
3
ПРЕДИСЛОВИЕ
В учебном пособии изложены теоретические основы структурного анализа и синтеза механизмов. Пособие знакомит студентов с конструкцией, принципом действия, общими приемами и методами исследования существующих и проектирования новых структурных схем типовых механизмов, широко применяемых в различных областях современной техники. Приведены основные понятия и определения теории механизмов и машин. Представлена классификация кинематических пар и кинематических цепей. Рассмотрены общие принципы реализации движения с помощью механизмов, конструктивные особенности типовых механизмов, их классификация, определение степени подвижности, функциональные возможности и области применения.
Теоретические вопросы сопровождаются конкретными примерами. В конце каждого раздела предложены контрольные вопросы и задания, выполнение которых способствует качественному усвоению материала.
Материал пособия систематизирован и изложен в соответствии с курсом «Теория механизмов и машин» и базируется на сведениях, полученных студентами при изучении естественно-научных и общетехнических дисциплин: математики, физики, теоретической механики, начертательной геометрии и инженерной графики и др.
Учебное пособие может быть использовано студентами при выполнении лабораторных работ, контрольных заданий, курсового проекта, а также для подготовки к сдаче экзамена при изучении курса «Теория механизмов и машин».
4
1. ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ ТЕОРИИ МЕХАНИЗМОВ И МАШИН
Строением (структурой) механизма определяются такие его важнейшие характеристики, как виды осуществляемых движений и способы их преобразования [1, 2, 3]. Поэтому исследование механизмов начинают со структурного анализа, который предусматривает [4]:
♦выделение иклассификациюподвижныхзвеньев, кинематических пар;
♦определение степени подвижности (числа степеней свободы) механизма;
♦выявление и устранение избыточных (пассивных) связей и лишних степеней свободы;
♦выделение и классификацию структурных групп и элементарных механизмов;
♦определение класса и порядка механизма.
Для проведения структурного анализа и синтеза необходимо знать основные понятия и теорию строения механизмов.
1.1. ПОНЯТИЯ МАШИНЫ И МЕХАНИЗМА
Развитие современного общества неразрывно связано с созданием технических устройств, облегчающих или исключающих труд человека. К таким устройствам относятся машины, механизмы, аппараты и приборы.
Теория механизмов и машин (ТММ) − наука об общих методах исследования свойств механизмов и машин и их проектирования [5]. Как следует из определения, основными понятиями ТММ являются понятия машины и механизма.
Машина − техническое устройство, выполняющее механические движения для преобразования энергии, материалов и информации с целью замены или облегчения физического или умственного труда человека, повышения его качества и производительности. Под материалами понимаются обрабатываемые предметы, перемещаемые грузы и другие объекты труда [5].
Машина обязательно выполняет полезную механическую работу.
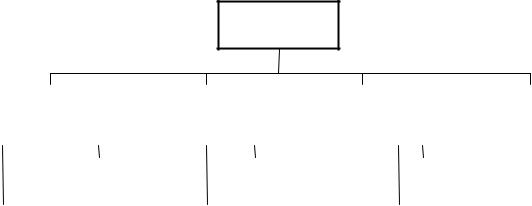
По выполняемым функциям различают четыре класса машин (рис. 1.1)
[1, 2, 3]:
1) энергетические машины, предназначенные для преобразования энергии:
5
а) машина-двигатель преобразует энергию любого вида в механическую (тепловые, электрические, гидравлические, пневматические двигатели и т.д.);
б) машина-генератор преобразует механическую энергию в какой-либо другой вид энергии (электрогенераторы, гидронасосы, компрессоры и т.д.);
Машина
Энергети- |
|
|
Рабочая |
|
|
Информа- |
|
|
Кибернети- |
|||||||
|
ческая |
|
|
|
|
|
|
|
|
ционная |
|
|
ческая |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
Генератор |
|
|
|
Технологическая |
|
|
Математическая |
||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Двигатель |
|
|
Транспортная |
|
|
|
Контрольно- |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
управляющая |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 1.1. Классификация машин
2) рабочие машины, предназначенные для преобразования материалов: а) транспортная машина преобразует материал путем изменения положения объекта (автомобили, конвейеры, транспортеры, лифты, подъ-
емные краны и т.д.); б) технологическая машина преобразует форму, свойства и состояние
материала или объекта (металлообрабатывающие и деревообрабатывающие станки, металлургические машины, прессы и молоты, буровые станки, горные машины и т.д.);
3)информационные машины, предназначенные для получения и преобразования информации:
а) контрольно-управляющая машина преобразует информацию с целью управления энергетическими или рабочими машинами (различные системы автоматического контроля и регулирования рабочих процессов);
б) математическая машина преобразует информацию с целью получения математических образов, соответствующих свойствам объекта (счетнорешающие машины и др.);
4)кибернетические машины, имитирующие или заменяющие человека в процессах деятельности, присущих только ему или объектам живой природы, и обладающие элементами искусственного интеллекта (промышленные роботы, манипуляторы, машины-автоматы и т.д.).
6
В современных развитых машинных устройствах выполнение необходимого технологического процесса осуществляется при согласованной работе нескольких машин различных классов.
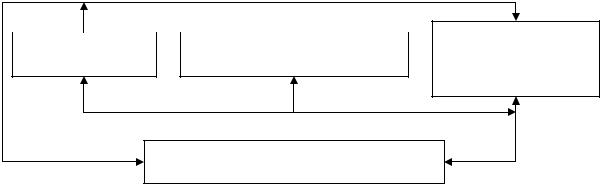
Техническая система, состоящая из нескольких машин, соединенных последовательно или параллельно, и предназначенная для выполнения ка- ких-либо требуемых функций, называется машинным агрегатом.
Обычно в состав машинного агрегата входят: двигатель, передаточный механизм (их может быть несколько или не быть совсем) и рабочая или энергетическая машина. Действие машинного агрегата обязательно связано с потоком механической энергии. Он начинается в источнике механической энергии, т.е. в двигателе, и далее через передаточный механизм направляется к потребителю механической энергии – рабочей или энергетической машине. В настоящее время в состав машинного агрегата часто включается контрольно-управляющая или кибернетическая машина [3] (рис. 1.2).

 Рабочая Двигатель Передаточный механизм (энергетическая)
Рабочая Двигатель Передаточный механизм (энергетическая)
машина
Контрольно-управляющая машина
Рис. 1.2. Структурная схема машинного агрегата
Передаточный механизм в машинном агрегате необходим для согласования механических характеристик двигателя с механическими характеристиками рабочей или энергетической машины. Например, вал двигателя обычно имеет более высокую частоту вращения, чем основной вал рабочей машины, передаточный механизм служит для уменьшения частоты вращения вала двигателя до уровня частоты вращения основного вала рабочей машины.
Механизмы являются составной частью большинства современных машин, приборов и аппаратов.
Механизм – система взаимосвязанных тел, предназначенная для преобразования движения одного или нескольких твердых тел в требуемые движения других тел. Механизмы не совершают полезной работы. Назначение механизма − воспроизведение заданного закона движения, передача и (или) преобразование движения и сил [5].
7
1.2.ЗВЕНЬЯ МЕХАНИЗМОВ И ИХ ВИДЫ
Вмашинах и механизмах применяются абсолютно твердые (жесткие), упругие (гибкие), жидкие и газообразные тела.
К упругим телам относят элементы, упругая деформация которых вносит существенные изменения в работу механизма (пружины, мембраны
ит.п.); к жидким и газообразным − масло, воду, газ, воздух и другие вещества. Если необходимо передать на относительно большое расстояние механическую энергию из одной точки пространства в другую, то применяют гибкие тела (ремни, цепи, канаты, нити, ленты, шарики и т.п.).
ВТММ классически изучаются машины и механизмы только с абсо-
лютно твердыми (жесткими) телами, так как перемещения, возникаю-
щие от упругих деформаций этих тел, как правило, малы по сравнению с перемещениями самих тел и их точек [1, 2, 3].
Элементарными составляющими любого технического устройства являются детали, которые определенным образом связаны между собой.
Деталь – изделие, которое изготавливается без сборочных операций и не может быть разобрано без разрушения (болты, гайки, шайбы, шпонки, зубчатые колеса, валы и т.п.).
При проведении структурного, кинематического и динамического анализа механизмов и машин важно знать не общее количество деталей, из которых они состоят, а количество совокупностей деталей, совершающих движение как одно целое.
Совокупность деталей, совершающую движение как одно целое и участвующую в заданном преобразовании движения, называют звеном.
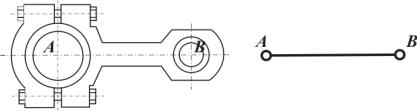
Звено может состоять из одной или нескольких деталей, не имеющих между собой относительного движения [5]. Основной признак звена заключается в том, что расстояние между любыми двумя точками звена неизменно. Например, шатун − звено двигателя внутреннего сгорания – состоит из стержня, втулок, крышек, соединенных болтами, гайками и т.п. (рис. 1.3, а).
а |
б |
Рис. 1.3. Шатун двигателя внутреннего сгорания: а – конструктивная форма; б – условное изображение
8
При исследовании механизмов звенья, независимо от их конструктивной формы, изображаются упрощенно в виде линий или геометрических фигур, отмечающих только кинематические особенности данного звена (рис. 1.3, б). Условные графические обозначения элементов машин и механизмов, атакжеэлементы ихкинематикиустанавливаются ГОСТ2.770-68* [6].
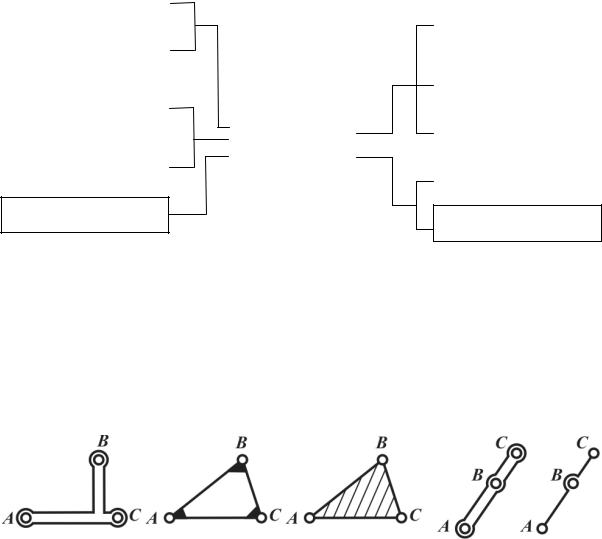
Звенья классифицируют по ряду признаков (рис. 1.4).
Простое |
|
|
|
|
|
|
|
|
Входное |
|
|
|
|
|
Сложное |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
Промежуточное |
|
|
|
|
|
Неподвижное |
|
|
||
|
|
|
|
|
|
|
|
|
|
(стойка) |
|
|
|
|
|
|
|
Выходное |
|
|
|
Звено |
|
|
|
|
|
|
|
|
|
|
|
|
Подвижное |
|
|
|
|
|
|
|
Ведущее |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
Начальное |
Ведомое |
|
Рис. 1.4. Классификация звеньев
Звенья, имеющие не более двух элементов, которыми они присоединяются к другим звеньям механизма, называются простыми, все остальные − сложными [4]. Простые звенья изображаются в виде линий (см. рис. 1.3, б), а сложные − в виде геометрических фигур (рис. 1.5, б, в, д).
а |
б |
в |
г |
д |
Рис. 1.5. Примеры сложных звеньев и их условных обозначений
Так, простое звено, входящее в два элемента А и В, изображается на схеме отрезком АВ (см. рис. 1.3, б). Сложное звено с тремя элементами А, В, С (рис. 1.5, а) изображается треугольником АВС (см. рис. 1.5, б). Геометрические фигуры, изображающие замкнутые контуры сложных звеньев, обычно заштриховываются (см. рис. 1.5, в). Если все элементы
9
расположены на одной прямой (рис. 1.5, г), то звено изображается так, как показано на рис. 1.5, д.
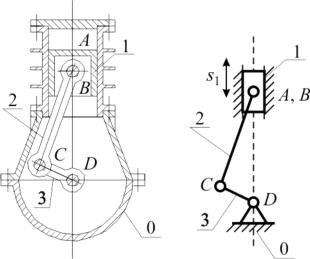
В механизмах стационарного типа некоторые детали являются неподвижными, другие детали движутся относительно них. В механизмах нестационарного типа, например в двигателе автомобиля (рис. 1.6), за неподвижные детали условно принимаются детали, неизменно связанные с корпусом 0 [1, 7].
а б
Рис. 1.6. Механизм двигателя внутреннего сгорания: а – схематизированные конструктивные формы звеньев; б – структурная схема
Неподвижные или условно принимаемые за неподвижные детали механизма, образующие одну жесткую систему неизменной конфигурации, называют стойкой или неподвижным звеном. За стойку принимают то звено, относительно которого изучают законы движения всех других звеньев. Например, в станках − это станина, в редукторах – корпус, в автомобилях – шасси или кузов и т.п.
Подвижное звено − подвижная деталь или группа деталей, образующая одну жесткую подвижную систему тел.
Таким образом, в любом механизме или машине имеется одно неподвижное звено и одно или несколько подвижных звеньев.
Звенья механизмов принято обозначать арабскими цифрами. Подвижные звенья обозначают любыми цифрами, отличными от нуля, а неподвижное звено (стойка) обозначается нулем и штриховкой под углом 45° (рис. 1.6, б).
Звено, которому сообщается движение, преобразуемое механизмом в требуемые движения других звеньев, называется входным [5]. Входные
10