

Структурный анализ и синтез механизмов
..pdfСтепень его подвижности
W = 6n − 5 p5 = 6 3 − 5 4 = −2 .
Это означает, что на механизм наложены избыточные связи, которые не влияют на его кинематику, но вызывают статическую неопределимость.
Избыточными связями называют такие связи, устранение которых не изменяет число степеней свободы механизма [5, 8].
Поскольку избыточные связи дублируют другие связи, не уменьшая подвижности механизма, а только обращая его в статически неопределимую систему, то степень подвижности механизма можно определить по следующей формуле [8]:
Wо − g = 6n − 5 p5 − 4 p4 − 3 p3 − 2 p2 − p1 , |
(4.8) |
гдеWо – основнаяподвижностьмеханизма; g – количествоизбыточныхсвязей. Следовательно,
g = Wо − 6n + 5 p5 + 4 p4 + 3 p3 + 2 p2 + p1 . |
(4.9) |
Для рассматриваемого шарнирного четырехзвенника (см. рис. 4.9, а) g = 1 − 6 3 + 5 4 = 3 . Такие механизмы требуют повышенной точности из-
готовления, в противном случае сборка такого механизма возможна только за счет деформации его звеньев, что вызывает монтажные напряжения в кинематических парах. При недостаточной точности изготовления механизма с избыточными связями трение в кинематических парах может сильно увеличиться и привести к заклиниванию звеньев. Таким образом, избыточные связи существенно снижают работоспособность и надежность конструкции.
Для исключения избыточных связей необходимо увеличить подвижность кинематических пар. В данном случае необходимо ввести три дополнительных подвижности. С этой целью можно, например, вращательную пару B выполнить сферической, а вращательную пару C – цилиндри-
ческой (рис. 4.9, б), тогда g =1 − 6 3 + 5 2 + 4 1 + 3 1 = 0 .
Механизм без избыточных связей можно собирать без натягов, что уменьшает силы трения в кинематических парах, увеличивает срок службы и надежность механизма. Такие механизмы называются рациональными
или самоустанавливающимися [8].
В состав некоторых механизмов могут входить звенья и кинематические пары, которые обладают условиями связи, не оказывающими никакого влияния на закон движения выходного звена. Такие связи называют
41
пассивными [1, 8]. Пассивные связи повышают жесткость механизма, уменьшают его деформации, а также более равномерно распределяют нагрузку на звенья и кинематические пары.
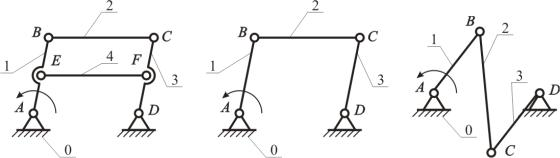
На рис. 4.10, а показан плоский механизм параллельных кривошипов. Степень подвижности этого механизма W = 3 4 − 2 6 = 0 . Это означает, что эта кинематическая цепь представляет собой жесткую неподвижную систему (ферму).
а |
б |
в |
Рис. 4.10. Схема механизма параллельных кривошипов:
а – со звеном, налагающим пассивные условия связи; б – освобожденного от пассивных условий связи; в – антипараллелограмма
Однако если размеры звеньев механизма удовлетворяют условиям АВ = СD, АЕ = ЕB и DF = FC, ВС = FЕ = АD и оси шарниров параллельны, то этот механизм обладает подвижностью, равной 1, как в механизме без звена 4 (рис. 4.10, б): W = 3 3 − 2 4 =1. Звено 4 устанавливается для исключения превращения механизма параллельных кривошипов в антипараллелограмм (рис. 4.10, в) при выходе второго кривошипа из крайних положений, в которых оси всех звеньев расположены на одной прямой. При несоблюдении указанных выше условий число степеней свободы механизма действительно будет равно 0 и движение звеньев невозможно.
Такой же эффект наблюдается в зубчатом механизме, представленном на рис. 4.11, а. Количество подвижных звеньев механизма n = 4 (звенья 1, 2, 2′ и 3), количество низших кинематических пар p5 = 4 (вращательные пары О1, О2, О2′ и О3), количество высших кинематических пар p4 = 4 (пары А, В, С и D). Степень подвижности данного механизма W = 3 4 − 2 4 − 4 = 0 , формально это говорит о том, что его звенья не имеют подвижности. Однако из схемы механизма очевидно, что при задании движения зубчатому колесу 1 остальные колеса получают вполне определенные движения.
Ничего не изменится в движении выходного колеса 3, если колесо 2 или 2′ удалить из механизма (рис. 4.11, б). Следовательно, кинематические
42
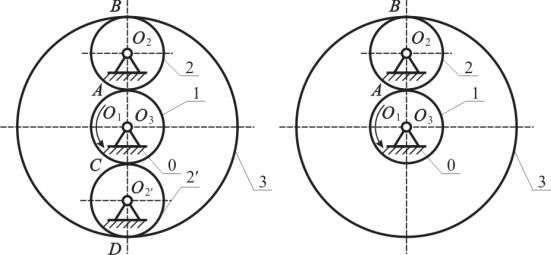
пары одного из этих колес (любого) накладывают пассивные связи. При определении его степени подвижности следует считать, что в механизме количество подвижных звеньев n = 3 (звенья 1, 2 и 3), количество низших кинематических пар p5 = 3 (пары О1, О2, О3), количество высших кинематических пар p4 = 2 (пары А и В), тогда W = 3 3 − 2 3 − 2 = 1.
а |
б |
Рис. 4.11. Схема зубчатого механизма: а – с пассивными связями, б – освобожденного от пассивных условий связи
Звено 2′, накладывающее пассивные условия связи, вводится для того, чтобы снизить усилия в зацеплении зубьев колес и, следовательно, уменьшить габариты передачи.
4.5. ЛИШНИЕ СТЕПЕНИ СВОБОДЫ
Если в механизме имеются звенья, которым можно придать движение независимо от других звеньев и движение которых не влияет на движение остальных звеньев, то такие механизмы обладают лишними степенями свободы. Подвижность звена, не влияющая на подвижность механизма в целом, называется местной подвижностью [7, 8].
Чаще всего местные подвижности вводят в механизмы для улучшения условий работы отдельных его частей (повышения КПД, уменьшения и выравнивания износа в кинематических парах, повышения надежности и т.п.).
Примером механизма с лишними степенями свободы является кулачковый механизм с роликовым толкателем (рис. 4.12, а). Количество подвижных звеньев этого механизма n = 3 (1 − кулачок, 2 − ролик, 3 − толка-
43
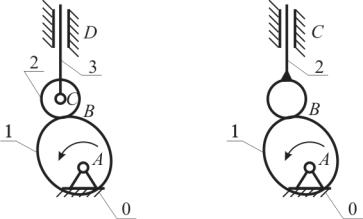
тель), количество низших кинематических пар p5 = 3 (пары А, С, D), количество высших кинематических пар p4 = 1 (пара В). Степень подвижности такого механизма W = 3 3−2 3−1 = 2.
а |
б |
Рис. 4.12. Схема кулачкового механизма: а – |
с лишней степенью |
свободы; б – освобожденного от лишней степени свободы
Однако вращение круглого ролика 1 вокруг его оси, проходящей через точку В, не оказывает влияния на характер движения звена 2 [8]. Свободно поворачивающийся ролик обладает местной подвижностью Wм = 1. Поэтому полученная подвижность данного механизма W = Wо+Wм = 1+1 = 2.
Без нарушения характера движения механизма в целом ролик можно жестко соединить с толкателем (рис. 4.12, б). Такой механизм будет воспроизводить движение толкателя по тому же закону, что и первоначальный механизм, но при этом будет освобожден от местной подвижности. Здесь количество подвижных звеньев n = 2 (1 − кулачок и 2 − толкатель), количество низших кинематических пар p5 = 2 (пары А и С), количество высших кинематических пар p4 = 1 (пара В) и степень подвижности меха-
низма W = 3 2−2 2−1 = 1.
Пример пространственного механизма с местной подвижностью представлен на рис. 4.13. Шатун 2 входит в две сферические кинематические пары с подвижными звеньями.
Степень подвижности механизма W = 6 3−5 2−3 2 = 2. В этом случае помимо основной подвижности механизма Wо = 1 появляется местная подвижность Wм = 1 − возможность вращения шатуна 2 вокруг своей оси ВС.
Эта подвижность не влияет на основной закон движения механизма, но может быть полезна с точки зрения выравнивания износа шарниров: шатун 2 может при работе механизма поворачиваться вокруг своей оси за счет динамических нагрузок.
44
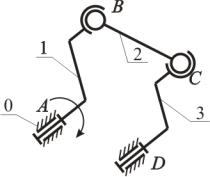
Рис. 4.13. Схема рычажного механизма с лишней степенью свободы
Таким образом, если перемещения выходных звеньев механизма можно определить без одного или нескольких звеньев, то эти звенья накладывают пассивные связи или вносят лишние степени свободы.
Наличие избыточных (пассивных) условий связи и лишних степеней свободы должно обязательно учитываться при структурном анализе механизма.
Контрольные вопросы
1.Физический смысл степени подвижности механизма.
2.Понятие о структурной формуле.
3.Соответствует ли количество начальных звеньев степени подвижности механизма?
4.Определение степени подвижности пространственного механизма
сзамкнутой кинематической цепью.
5.Определение степени подвижности пространственного механизма
снезамкнутой кинематической цепью.
6.Физический смысл коэффициентов структурной формулы.
7.Определение степени подвижности плоского механизма.
8.Область применения формул Чебышева и Добровольского.
9.Какие пары могут существовать в плоских механизмах?
10.Что называется избыточными связями в замкнутой кинематической цепи?
11.Понятие о рациональных (самоустанавливающихся) механизмах.
12.Для чего и как необходимо избавляться от избыточных связей?
13.Укажите основные характеристики пассивных звеньев и приведите примеры.
14.Для чего в состав механизмов включают пассивные звенья?
15.В чем заключается местная подвижность звеньев механизма?
16.С какой целью в механизмы вводятся лишние степени свободы?
45
Задания
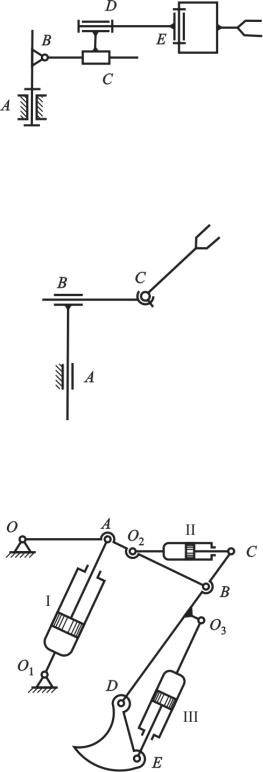
1. Определить количество степеней свободы данного механизма манипулятора:
2. Определить число степеней подвижности данного механизма манипулятора:
3. Определить количество степеней свободы механизма обратной лопаты гидравлического экскаватора:
46
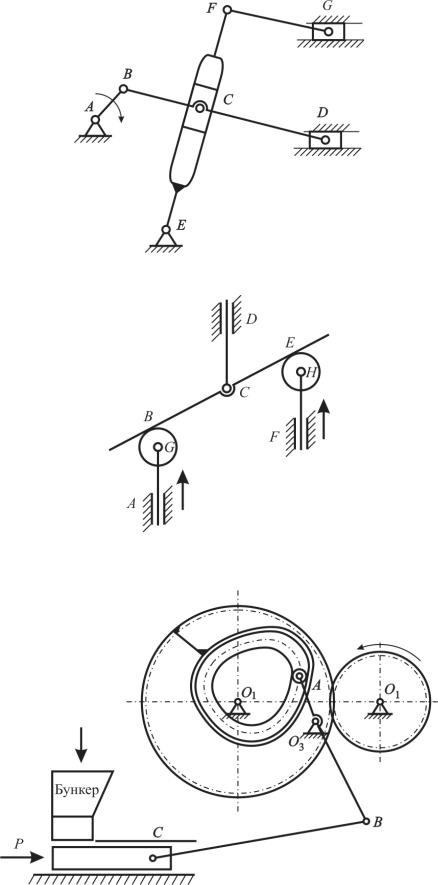
4. Определить количество степеней свободы приведенного механизма:
5. Определить число степеней подвижности приведенного механизма:
6. Определить число степеней подвижности механизма заполнения пресса:
47
5. СТРУКТУРА МЕХАНИЗМОВ
5.1.ЗАМЕНЯЮЩИЕ МЕХАНИЗМЫ
Внастоящее время наиболее полно разработаны методы исследования машин и механизмов, в состав которых входят только низшие кинематические пары. Поэтому для упрощения кинематического и силового анализа плоских механизмов высшие пары удобно заменять кинематическими цепями с низшими парами. Полученный в результате замены механизм называется заменяющим механизмом. При этом необходимо, чтобы заменяющий механизм обладал прежней степенью подвижности и сохранялись мгновенные относительные движения всех его звеньев.
Вплоском механизме высшая пара IV класса накладывает одно условие связи в соответствии с формулой (4.6). При замене высшей пары кинематической цепью с парами V класса заменяющая кинематическая цепь должна также накладывать одно условие связи, т.е. количество условий связи заменяющей кинематической цепи должно быть на единицу больше количества степеней свободы.
Следовательно, количество n звеньев заменяющей цепи и количество низших кинематических пар V класса, в которые входят эти звенья, должно удовлетворять условию [9]:
2 p5 − 3n = 1 , |
(5.1) |
||
следовательно, |
|
||
p5 = |
3n + 1 |
. |
(5.2) |
|
|||
2 |
|
|
|
Так как числа n и p5 могут быть только целыми, то из соотношения |
|||
(5.2) следует, что наименьшее количество пар V класса |
p5 у заменяющей |
||
цепи равно двум, а наименьшее количество звеньев n – единице. Таким образом, высшая кинематическая пара IV класса в плоском механизме с точки зрения количества условий связи эквивалентна одному звену, входящему в две низшие кинематические пары V класса. Длина заменяющего звена равна сумме радиусов кривизны кривых в точке касания, образующих высшую пару. Низшие пары, в которые входит это звено, располагаются соответственно в центрах кривизны звеньев в точке касания.
48
Известно, что окружность кривизны в точке касания с кривой и сама кривая эквивалентны до производных второго порядка включительно, поэтому заменяющий механизм эквивалентен основному, т. е. положения, скорости и ускорения одноименных точек механизмов будут одинаковыми.
Алгоритм замены высших кинематических пар низшими [4, 9]:
1.В месте контакта элементов заменяемой высшей пары проводят общую нормаль N-N.
2.Находят на нормали центры О кривизны звеньев, образующих эту высшую пару в месте контакта.
3.Помещают:
♦в найденный центр кривизны вращательную кинематическую пару, если радиус кривизны звена конечен;
♦в месте контакта поступательную кинематическую пару, если радиус кривизны звена бесконечен.
4.Последовательно соединяют между собой все ранее существовавшие и вновь образованные кинематические пары звеньями.
Процедура замены высших кинематических пар кинематическими цепями с низшими парами рассмотрена на следующих характерных приме-
рах [1, 7, 9].
Пример 5.1.
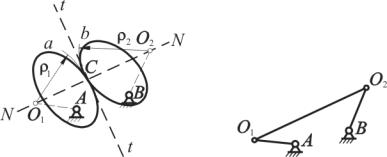
Элементы звеньев механизма с высшей парой С (рис. 5.1, а) представляют собой произвольно заданные кривые a и b.
а |
б |
Рис. 5.1. Схемы механизмов: а – |
основного; |
б – заменяющего шарнирного четырехзвенника
Для построения схемы заменяющего механизма проводят общую касательную t-t в точке С контакта кривых. В месте контакта элементов заменяемой высшей пары перпендикулярно общей касательной t-t строят общую нормаль N-N и отмечают на ней центры О1 и О2 кривизны кривых а и b. Поскольку радиусы кривизны ρ1 и ρ2 конечны, то в найденные центры кривизны помещают вращательные кинематические пары. Длина заме-
49
няющего звена О1О2 равна сумме радиусов ρ1 и ρ2 кривизны кривых в точке касания, образующих высшую пару. Схема заменяющего механизма шарнирного четырехзвенника представлена на рис. 5.1, б.
Пример 5.2.
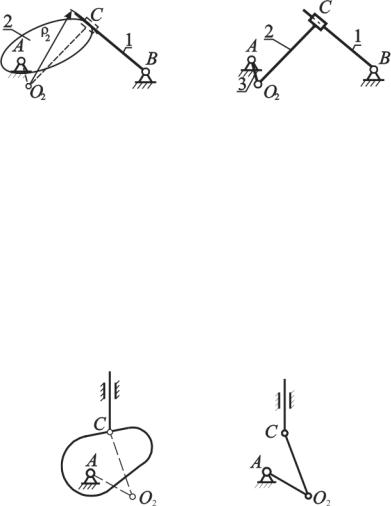
На рис. 5.2, а показана схема кулачкового механизма с коромыслом (звено 1). Высшая пара в точке С, образованная касанием прямой коромысла 1 с криволинейным профилем кулачка 2, заменяется звеном, входящим с одной стороны в поступательную пару С V класса, так как центр кривизны прямой звена 1 находится в бесконечности (ρ1 = ∞ ), а с другой стороны во вращательную пару О2 V класса, расположенную в центре кривизны кривой в точке касания.
а |
б |
Рис. 5.2. Схемы механизмов: а – основного кулачкового с коромыслом; б – заменяющего кулисного
При этом длина заменяющего звена O2С равна длине радиуса ρ2 кривизны кривой звена 2 в точке касания C. Заменяющим будет являться кулисный механизм (рис. 5.2, б).
Пример 5.3.
В кулачковом механизме с остроконечным толкателем (рис. 5.3, а) один из соприкасающихся элементов – замкнутая кривая профиля кулачка, а другой – точка С.
а |
б |
Рис. 5.3. Схемы механизмов: а – |
основного кулачкового |
с остроконечным толкателем; б – заменяющего кривошипно-ползунного
Центр кривизны остроконечного толкателя совпадает с самой точкой С, и поэтому заменяющее звено должно входить в две вращательные
50