

Структурный анализ и синтез механизмов
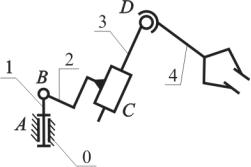
..pdfВходное звено простейшего механизма мальтийского креста с внешним зацеплением (рис. 3.8, а) выполнено в виде кривошипа 1 с роликом 3. Звено 2 представляет собой диск, снабженный радиальными пазами. Механизм мальтийского креста преобразует непрерывное вращение кривошипа 1 с роликом 3 в прерывистое вращение креста 2.
При вращении звена 1 ролик 3 без удара входит в соответствующие пазы звена 2 и поворачивает его на определенный угол. При выходе ролика 3 из пазов звено 2 стоит неподвижно.
Храповые механизмы предназначены для осуществления движения выходного звена только в одном направлении. Храповые механизмы широко применяются в станках, грузоподъемных машинах, часовых механизмах, а также в передачах периодического движения.
При качании коромысла 1 качающаяся собачка 3 сообщает вращение храповому колесу 2 только при движении коромысла по часовой стрелке (рис. 3.8, б). Удержание колеса 2 от его самопроизвольного поворота против часовой стрелки осуществляется стопорной собачкой 4.
Контрольные вопросы
1.В чем отличие механизмов от кинематических цепей?
2.Классификация механизмов.
3.Рычажные механизмы и их классификация.
4.Преимущества рычажных механизмов перед другими видами механизмов.
5.Понятие о приводе механизма.
6.Виды звеньев плоских рычажных механизмов в зависимости от вида совершаемых ими движений.
7.Особенности кулачковых механизмов.
8.Преимущества кулачковых механизмов перед другими видами механизмов.
9.Конструктивные признаки зубчатых механизмов.
10.Виды зубчатых механизмов.
11.Назначение механизмов прерывистого движения.
31
4.ПОДВИЖНОСТЬ МЕХАНИЗМОВ
4.1.СТРУКТУРНАЯ ФОРМУЛА КИНЕМАТИЧЕСКОЙ ЦЕПИ
Степеньподвижности(свободы) механизма− количество обобщенных координат механизма [5], которые должны быть заданы начальным звеньям, дляопределенностиположенияподвижныхзвеньевотносительностойки.
Число степеней свободы механизма соответствует количеству независимых движений, которые необходимо задать входным звеньям, чтобы получить определенное принужденное движение остальных подвижных звеньев, и определяет количество необходимых для его движения приводов.
Существуют общие закономерности в структуре (строении) различных механизмов, связывающие количество степеней свободы механизма с количеством звеньев и количеством и видом его кинематических пар. Эти закономерности называются структурными формулами механизмов. По структурным формулам проводят структурный анализ имеющихся механизмов и синтез структурных схем новых механизмов.
Структурная формула пространственной кинематической цепи может быть получена из следующих соображений. Если на движение звена в пространстве не наложено никаких условий связи, то оно обладает шестью степенями свободы. В этом случае при количестве звеньев кинематической цепи, равном K, общее количество степеней свободы, которым обладает K звеньев до их соединения в кинематические пары, равно 6K. Соединение звеньев в кинематические пары накладывает различное количество условий связи на относительное движение звеньев, зависящее от класса пар [1, 7]. Количество кинематических пар соответствующего класса, в которые входят звенья рассматриваемой кинематической цепи, можно обозначить так:
p1 − количество пар I класса; p2 − количество пар II класса; p3 − количество пар III класса; p4 − количество пар IV класса; p5 − количество пар V класса.
Тогда из 6K степеней свободы необходимо исключить те степени свободы, которые отнимаются вхождением звеньев в кинематические пары, т.е. общее количество степеней свободы Н, которым обладает кинематическая цепь, равно разности количества степеней свободы ее звеньев до соединения кинематическими парами и количества связей, налагаемых на звенья кинематическими парами:
32
H = 6K − 5 p5 − 4 p4 − 3 p3 − 2 p2 − p1 . |
(4.1) |
Коэффициенты этого уравнения имеют следующий физический смысл [1, 9]:
6 − количество степеней свободы каждого из K звеньев в пространстве до их соединения кинематическими парами;
5 − количество условий связи, накладываемых каждой кинематической парой V класса;
4 − количество условий связи, накладываемых каждой кинематической парой IV класса;
3 − количество условий связи, накладываемых каждой кинематической парой III класса;
2 − количество условий связи, накладываемых каждой кинематической парой II класса;
1 − количество условий связи, накладываемых каждой кинематической парой I класса.
В структурные формулы не входят размеры звеньев, поэтому при проведении структурного анализа механизмов можно предполагать их любыми (в некоторых пределах).
4.2. ПОДВИЖНОСТЬ ПРОСТРАНСТВЕННЫХ МЕХАНИЗМОВ
При наличии в механизме неподвижного звена общее число степеней свободы цепи (4.1) уменьшится на шесть, и относительно неподвижного
звена количество степеней свободы механизма |
|
W = H − 6 . |
(4.2) |
Тогда |
|
W = 6(K −1) − 5 p5 − 4 p4 − 3 p3 − 2 p2 − p1 . |
(4.3) |
В результате, обозначив величину (K −1) через n, |
получим формулу |
Сомова–Малышева [1] для определения степени подвижности пространственных механизмов:
W = 6n − 5 p5 − 4 p4 − 3 p3 − 2 p2 − p1 , |
(4.4) |
где n − количество подвижных звеньев; pi − количество кинематических пар i-го класса ( i =1…5).
Ниже представлены примеры определения степени подвижности пространственных механизмов.
33

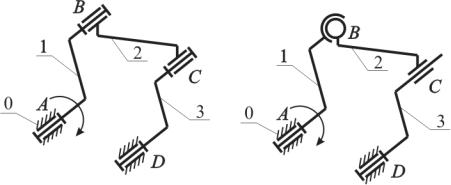
Пример 4.1.
На рис. 4.1 приведена структурная схема пространственного рычажного механизма, предназначенного для преобразования вращательного движения кривошипа 1 в возвратно-поступательное движение ползуна 4.
Рис. 4.1. Структурная схема пространственного кривошипно-ползунного механизма
Данный механизм содержит четыре подвижных звена и пять низших кинематических пар. Кинематические пары A, B и C − вращательные V класса; D − сферическая III класса; E − поступательная V класса. Количество степеней свободы механизма
W = 6 n − 5 p5 − 3 p3 = 6 4 − 5 4 − 3 1 =1.
Пример 4.2.
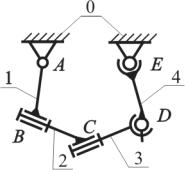
Двухкривошипный пространственный рычажный механизм (рис. 4.2) служит для передачи вращения от кривошипа 1 к кривошипу 3 при произвольном угле α между осями вращения.
Рис. 4.2. Структурная схема двухкривошипного пространственного рычажного механизма
В состав механизма входят три подвижных звена и четыре низшие кинематические пары. Кинематические пары A и D − вращательные V класса; B − цилиндрическая IV класса; C − сферическая III класса. Количество степеней свободы механизма
W = 6 n − 5 p5 − 4 p4 − 3 p3 = 6 3 − 5 2 − 4 1− 3 1 =1.
34
Воснове рассмотренных пространственных механизмов лежали замкнутые кинематические цепи, в которых замыкание подвижных звеньев механизма осуществлялось на стойку.
Вмеханизмах с незамкнутыми кинематическими цепями количество подвижных звеньев равно количеству кинематических пар, и для них формула (4.4) принимает вид [1]
W = p5 + 2 p4 + 3 p3 + 4 p2 + 5 p1 , |
(4.5) |
т.е. степень подвижности такого механизма равна сумме степеней свободы кинематических пар.
Пример 4.3.
На рис. 4.3 показана структурная схема механизма манипулятора, которая представляет собой незамкнутую пространственную кинематическую цепь.
Рис. 4.3. Структурная схема пространственного механизма манипулятора
Механизм манипулятора имеет четыре подвижных звена и четыре низшие кинематические пары. Кинематические пары A и B − вращательные V класса (одноподвижные); C − поступательная V класса (одноподвижная); D − сферическая III класса (трехподвижная). Количество степеней свободы механизма
W = p5 + 3 p3 = 3 + 3 1 = 6 .
Такой же результат будет получен при подсчете числа степеней свободы механизмов с незамкнутыми кинематическими цепями по формуле (4.4):
W= 6n − 5 p5 − 3 p3 = 6 4 − 5 3 − 3 1 = 6 .
За м е ч а н и е: количество входных (начальных) звеньев пространственных механизмов меньше или равно степени подвижности, так как в зависимости от вида кинематических пар одному начальному звену в пространстве могут быть заданы одна или несколько обобщенных координат.
35
Пример 4.4.
Пространственный рычажный механизм с замкнутой кинематической цепью (рис. 4.4) содержит четыре подвижных звена и пять низших кинематических пар. Кинематические пары A, B и C − вращательные V класса (одноподвижные); D − сферическая с пальцем IV класса (двухподвижная); E − сферическая III класса (трехподвижная). Количество степеней свободы механизма
W = 6 n − 5 p5 − 4 p4 − 3 p3 = 6 4 − 5 3 − 4 1 − 3 1 = 2 .
Рис. 4.4. Структурная схема пространственного рычажного механизма
Для определенности положения подвижных звеньев данного механизма необходимо задаться двумя обобщенными координатами. Например, можно задать по одному вращательному движению двум входным звеньям 1 и 4 или два независимых вращательных движения одному входному звену 4.
4.3. ПОДВИЖНОСТЬ ПЛОСКИХ МЕХАНИЗМОВ
При выводе формулы Сомова– Малышева (4.4) предполагается, что связи, ограничивающие движения звеньев, накладываются только при соединении их в кинематические пары. Однако во многих случаях кроме этих связей могут быть наложены дополнительные общие для всех звеньев связи, независимо от их соединения в кинематические пары. Например, все звенья плоского механизма должны двигаться в одной плоскости XOY. Этим до соединения звеньев в кинематические пары исключаем поступательное движение вдоль оси Z и вращательные движения вокруг осей X и Y, т. е. накладываем три дополнительных условия связи. Такие дополнительные связи существенно изменяют характер движения звеньев и структуру механизма. Формула степени подвижности при наличии общих связей будет отличаться от выведенной и зависеть от числа этих общих связей.
36
Так как в плоском механизме наложено три общих связи, то до соединения в кинематические пары звенья имели 3n степеней свободы. При этом кинематическая пара каждого класса должна накладывать на три условия связи меньше, так как три связи уже наложены [1, 9]. Поэтому для плоских механизмов степень подвижности определяется по формуле Чебышева [1]:
W = 3n − 2 p5 − p4 . |
(4.6) |
Из формулы (4.6) видно, что на плоскости могут существовать только кинематические пары V класса (низшие) и IV класса (высшие), так как остальные обладают пространственным характером возможных относительных движений. В плоском механизме кинематическая пара V класса (одноподвижная) накладывает на относительное движение звеньев два условия связи, IV класса (двухподвижная) − одно условие связи.
З а м е ч а н и е: степень подвижности плоских механизмов соответствует количеству входных (начальных) звеньев.
Пример 4.5.
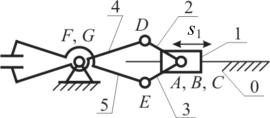
На рис. 4.5 приведена структурная схема плоского рычажного механизма схвата, применяемого в промышленных роботах, где звено 1 является ползуном, звенья 2 и 3 − шатунами, звенья 4 и 5 − коромыслами, 0 − стойкой.
Рис. 4.5. Структурная схема плоского рычажного механизма схвата
В месте соединения четырех звеньев (0, 1, 2 и 3) образуются три кинематические пары: А − поступательная V класса, В и С − вращательные V класса; в соединении трех звеньев (0, 4 и 5) − две вращательные пары V класса F и G. Степень подвижности механизма
W = 3n − 2 p5 = 3 5 − 2 7 =1.
Для получения определенности положения подвижных звеньев механизма достаточно задаться одной обобщенной координатой − перемещением ползуна s1.
37
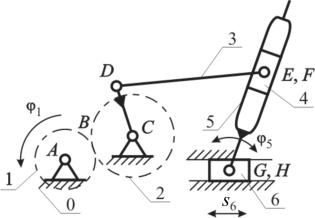
Пример 4.6.
Плоский зубчато-рычажный механизм, изображенный на рис. 4.6, имеет шесть подвижных звеньев (1 − зубчатое колесо, 2 − зубчатое колесо с кривошипом, 3 − шатун, 4 − кулисный камень, 5 − кулиса, 6 − ползун), семь низших кинематических пар V класса (A, C, D, E, G − вращательные; F, H − поступательные) и одну высшую кинематическую пару B в контакте между зубьями зубчатых колес.
Рис. 4.6. Структурная схема плоского зубчато-рычажного механизма
Степень подвижности механизма
W = 3n − 2 p5 − p4 = 3 6 − 2 7 −1 = 3 .
Для получения определенности положения подвижных звеньев механизма необходимо задаться тремя обобщенными координатами, например углом поворота зубчатого колеса ϕ 1, углом поворота кулисы ϕ 5 и перемещением ползуна s6.
Пример 4.7.
В состав плоского кулачково-рычажного механизма, изображенного на рис. 4.7, входят шесть подвижных звеньев и девять кинематических пар. Кинематические пары: A, B, D, E, F, G, H − низшие вращательные V класса; C − высшая IV класса (между кулачком 1 и коромыслом 2); K − низшая поступательная V класса.
Степень подвижности механизма
W = 3n − 2 p5 − p4 = 3 6 − 2 8 −1 = 1.
Для получения определенности положения подвижных звеньев механизма достаточно задаться одной обобщенной координатой – углом поворота кулачка ϕ 1.
38
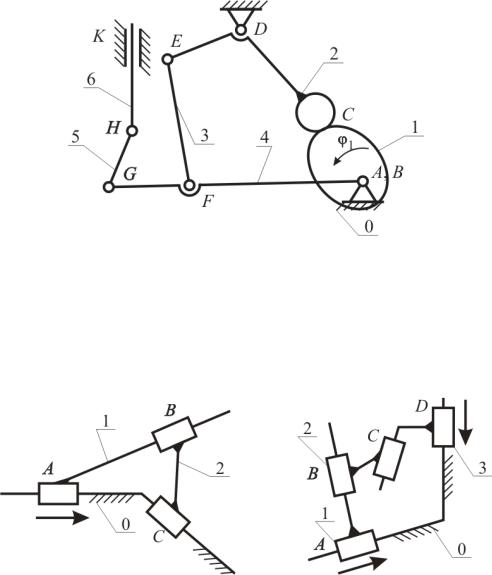
Рис. 4.7. Структурная схема плоского кулачково-рычажного механизма
К плоским механизмам относятся также механизмы с одними поступательными парами, оси движения которых параллельны одной общей плоскости, например клиновые механизмы (рис. 4.8).
а |
б |
Рис. 4.8. Схемы клиновых механизмов: а – одноподвижного; б – двухподвижного
Клиновые механизмы применяют в различного рода зажимных устройствах и приспособлениях, в которых требуется создать большое усилие на выходном звене при ограниченных силах, действующих на входе. Достоинствами этих механизмов являются простота и надежность конструкции.
Поскольку звенья этих механизмов не имеют возможности вращательного движения вокруг оси, перпендикулярной к плоскости их движения, т.е. обладают только двумя степенями свободы (на звенья накладываются четыре дополнительные общие связи), то степень подвижности таких механизмов определяется по формуле Добровольского [1]:
39
W = 2n − p5. |
(4.7) |
Как следует из формулы (4.7), плоские механизмы этого вида могут быть образованы только парами V класса. Поскольку в этих механизмах звенья могут совершать только поступательное движение, то пары V класса могут быть только поступательными.
На рис. 4.8, а представлена схема клинового механизма с одной степенью свободы (W = 2 2 − 3 = 1), а на рис. 4.8, б − схема клинового механизма с двумя степенями свободы (W = 2 3 − 4 = 2).
Найденное по формуле (4.4) или (4.6) число степеней свободы механизма не всегда будет соответствовать действительному. Необходимо учитывать, что в кинематические пары, оказывающие активное воздействие на характер движения механизма, могут входить звенья, которые накладывают избыточные и пассивные связи или вносят лишние степени свободы.
4.4. ИЗБЫТОЧНЫЕ И ПАССИВНЫЕ СВЯЗИ
На рис. 3.3 представлена структурная схема механизма идеального плоского шарнирного четырехзвенника (оси вращательных кинематических пар А, В, С и D параллельны). В реальном механизме неизбежны отклонения размеров звеньев от их номинальных значений, а также деформация звеньев под действием активных нагрузок [2, 3, 8].
Если непараллельность осей вращательных пар механизма не компенсируется зазорами между элементами этих пар, то его следует рассматривать как пространственный механизм (рис. 4.9, а).
а |
б |
Рис. 4.9. Структурные схемы квазиплоских рычажных механизмов: а – с избыточными связями; б – без избыточных связей
40