

Структурный анализ и синтез механизмов
..pdfследовательно, количество звеньев и кинематических пар простейшей структурной группы с высшими парами должно удовлетворять условию:
n = 1, p5 = 1, p4 = 1.
5.3. СТРУКТУРНЫЙ АНАЛИЗ МЕХАНИЗМОВ
Целью структурного анализа является определение степени подвижности, класса и порядка механизма для применения общих методов кинематического, силового и динамического анализа. Выделение в составе механизма структурных групп особенно важно при графических методах исследования и разработке программ расчета параметров механизма на ЭВМ (модульный принцип разработки алгоритмов).
Алгоритм структурного анализа [9]:
1.По исходным данным выполняют структурную схему механизма.
2.Определяют степень подвижности механизма.
3.Устанавливают избыточные (пассивные) связи и звенья, дающие лишние степени свободы, что позволяет сделать соответствующую поправку при определении степени подвижности механизма.
4.В случае наличия высших кинематических пар строят заменяющий механизм.
5.Проводят разложение механизма на структурные группы и определяют класс, вид и порядок структурных групп и самого механизма.
6.Составляют формулу строения механизма.
Формула строения механизма – запись последовательности присоединения структурных групп к одному или нескольким механизмам I класса, а также соединения групп между собой.
З а м е ч а н и я:
а) отсоединение структурных групп начинают с групп II класса, наиболее удаленных по кинематической цепи от входного звена;
б) после отсоединения очередной структурной группы проверяют степень подвижности оставшейся кинематической цепи. Если ее подвижность изменилась, то отсоединение сделано неверно, и следует попытаться отсоединить пару звеньев в другой комбинации;
в) если отсоединить структурную группу II класса не удается, то следует попытаться отсоединить группу более высокого класса;
г) после отсоединения первой группы продолжают отсоединять от оставшейся кинематической цепи следующую группу, проверив степень подвижности оставшейся кинематической цепи;
61
д) в результате разложения механизма должны остаться стойка и k начальных звеньев механизма (количество начальных звеньев плоского механизма равно степени подвижности).
Пример 5.6.
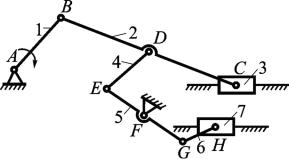
На рис. 5.19 представлена структурная схема плоского рычажного механизма.
Число степеней свободы плоского механизма по формуле Чебышева
W = 3n − 2 p5 − p4 .
Для данного механизма n = 7; p5 = 10; p4 = 0. Таким образом,
W = 3 7 − 2 10 − 0 = 1.
Рис. 5.19. Механизм двухцилиндрового компрессора
Для определенности положения подвижных звеньев механизма относительно стойки в нем должно быть одно начальное звено, например кривошип 1.
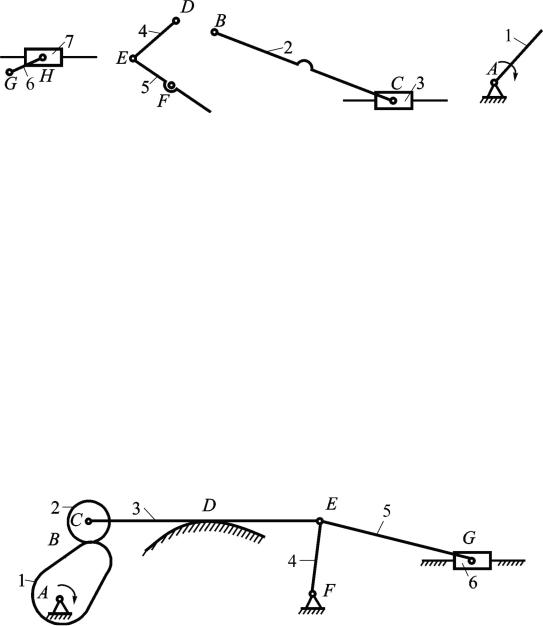
Разложение механизма на структурные группы следует начинать с отсоединения простейшей группы Ассура, наиболее удаленной по кинематической цепи от начального звена 1. Это группа II класса второго вида, содержащая звенья 7 и 6 (рис. 5.20, а). Оставшаяся кинематическая цепь является замкнутой, число ее степеней свободы
W = 3 5 − 2 7 =1,
т.е. осталось прежним. Значит, отсоединение выполнено правильно. Далее необходимо отсоединить структурную группу II класса первого
вида, состоящую из звеньев 4 и 5 (рис. 5.20, б). Степень подвижности оставшейся кинематической цепи не изменилась:
W = 3 3 − 2 4 = 1.
62
а |
б |
в |
г |
Рис. 5.20. Схемы структурных групп и механизма I класса двухцилиндрового компрессора
Впоследнюю очередь отсоединяется структурная группа II класса второго вида, содержащая звенья 2 и 3 (рис. 5.20, в).
Врезультате разложения остался механизм I класса (начальное звено со стойкой), имеющий W = 1 (рис. 5.20, г).
Таким образом, данный механизм является механизмом II класса второго порядка (II2). Он образован последовательным присоединением к на-
чальному звену и стойке структурных групп II класса второго вида, II класса первого вида и II класса второго вида. Формула строения меха-
низма: I → II2 → II1→ II2.
Пример 5.7.
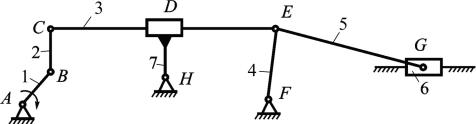
Структурная схема плоского кулачково-рычажного механизма приведена на рис. 5.21.
Рис. 5.21. Механизм сталкивателя
Для данного механизма n = 6; p5 = 7; p4 = 2. В случае соединения нескольких звеньев (например, шарнир E) количество кинематических пар определяется количеством соединяемых звеньев, уменьшенным на единицу. Так, в шарнире E соединяются три звена, следовательно, количество кинематических пар здесь p5 = 2.
Таким образом,
W = 3 6 − 2 7 − 2 = 2 .
Формально это говорит о том, что для определенности положения всех звеньев механизма в нем должно быть два начальных звена или одно начальное звено с двумя заданными обобщенными координатами.
63
Однако из схемы механизма очевидно, что все звенья совершают вполне определенное движение лишь при одном заданном движении одному из них, например кулачку 1. Лишнее число степеней свободы механизма, получаемое при подсчете по формуле (4.6), обусловлено наличием местной подвижности ролика 2. Возможность вращения ролика 2 относительно стержня 3 не влияет на движение остальных звеньев механизма.
Если жестко закрепить ролик 2 на стержне 3, то при этом относительное движение остальных звеньев останется прежним, но количество подвижных звеньев n и число кинематических пар V класса р5 уменьшатся на единицу (n = 5, р5 = 6), a количество степеней свободы механизма окажется равным единице:
W = 3 5 − 2 6 − 2 =1.
Высшие кинематические пары В и D механизма заменяются эквивалентными кинематическими цепями с низшими парами.
Вцентры кривизны кулачка 1 и ролика 2 помещают вращательные кинематические пары, так как радиусы кривизны звеньев в месте контакта, образующих высшую кинематическую пару В, конечны. Вновь введенные кинематические пары соединяют между собой дополнительным звеном.
Вцентре кривизны криволинейной детали неподвижного звена, входящей в высшую кинематическую пару D, помещают вращательную кинематическую пару H. Так как радиус кривизны звена 3 бесконечен, то в месте контакта помещают поступательную кинематическую пару. Вновь образованные кинематические пары соединяют дополнительным звеном.
Схема заменяющего механизма приведена на рис. 5.22.
Рис. 5.22. Схема заменяющего механизма
Количество степеней свободы заменяющего механизма:
W = 3 7 − 2 10 =1.
Разложение механизма на структурные группы начинают с отсоединения структурной группы II класса второго вида, содержащей звенья 5 и 6 (рис. 5.23, а). Степень подвижности оставшейся кинематической цепи
64

W = 3 5 − 2 7 =1,
т.е. осталась прежней.
а |
б |
в |
Рис. 5.23. Схемы структурных групп и механизма I-го класса сталкивателя |
|
|
Дальнейшее отсоединение структурных групп II класса невозможно. Так, отсоединение звеньев 3 и 4 или 5 и 7 приведет к размыканию кинематической цепи.
Если не удается отсоединить группу II класса, нужно отсоединить группу III или IV класса, состоящую из четырех звеньев и шести кинематических пар. Поэтому отсоединяют звенья 2, 3, 4 и 7, которые образуют структурную группу III класса третьего порядка (рис. 5.23, б).
В результате разложения остается механизм I класса (начальное звено со стойкой), имеющий W = 1 (рис. 5.23, в). Следовательно, разложение на структурные группы произведено правильно.
Механизм относится к III классу третьего порядка (III3). Структурное строение механизма можно представить формулой
I → III3 → II2.
Контрольные вопросы
1.Цели и условия замены в плоских механизмах высших кинематических пар низшими.
2.Основной принцип образования механизмов по Ассуру– Артоболевскому.
3.Элементарный механизм и его признаки.
4.Что называют структурной группой Л.В. Ассура?
5.Как определяется класс и порядок структурной группы Ассура?
6.Чем определяется класс и порядок механизма?
7.Привести примеры основных видов плоских рычажных механизмов, образованных группами II класса второго порядка.
8.С какой целью проводится структурный анализ механизмов?
9.Последовательность проведения структурного анализа.
10.Как записывается формула строения механизма?
65
Задания
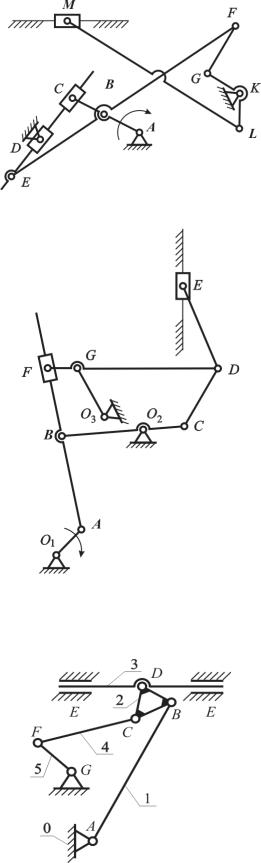
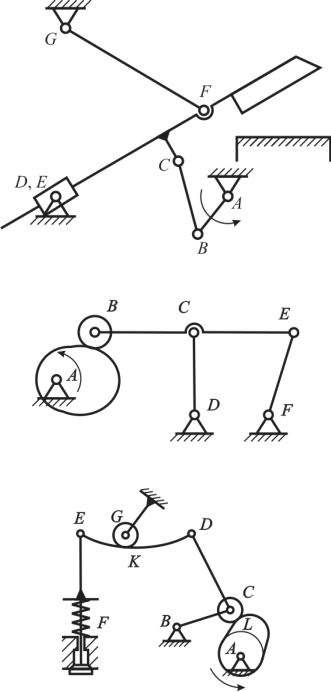
1. Привести формулу строения механизма:
2. Определить класс данного механизма:
3. Определить, какое звено надо принять за начальное, чтобы данный механизм грохота стал механизмом III класса третьего порядка по классификации Ассура– Артоболевского:
66
4. Определить класс механизма механических ножниц:
5. Определить класс данного механизма:
6. Привести формулу строения механизма газораспределения:
67
СПИСОК РЕКОМЕНДУЕМОЙ ЛИТЕРАТУРЫ
1.Артоболевский И.И. Теория механизмов и машин: учеб. для вузов / И.И. Артоболевский. – 6- е изд., стер. – М.: Альянс, 2011. – 639 с.
2.Теория механизмов и механика машин: учеб. для вузов / К. В. Фролов [и др.]; под ред. К.В. Фролова. – 5- е изд., стер. – М.: Изд-во МГТУ им. Н.Э. Баумана, 2009. – 662 с.
3.Тимофеев Г.А. Теория механизмов и машин: учеб. пособие для вузов / Г.А. Тимофеев. – 2- е изд. – М.: Юрайт, 2011. – 351 с.
4.Смелягин А.И. Структура механизмов и машин: учеб. пособие /
А.И. Смелягин. – М.: Высш. шк., 2006. – 304 с.
5.Теория механизмов и машин. Терминология: учеб. пособие / Н.И. Левитский [и др.]; под ред. К.В. Фролова. – М.: Изд-во МГТУ им.
Н.Э. Баумана, 2004. – 80 с.
6.ГОСТ 2.770–68* Обозначения условные графические в схемах. Элементы кинематики.
7.Теория механизмов и машин: конспект лекций: в 2 ч. / Н.М. Пост-
ников [и др.]; Перм. гос. техн. ун-т. – Пермь, 1993. – Ч.1. – 192 с.
8.Решетов Л.Н. Конструирование рациональных механизмов / Л.Н. Решетов. – 2- е изд. – М.: Машиностроение, 1972. – 256 с.
9.Кобитянский А.Е. Структурный и кинематический анализ рычажных механизмов: метод. пособие / А.Е. Кобитянский, А.В. Шафранов. – Пермь: Изд-во Перм. гос. техн. ун-та, 2008. – 30 с.
10.Артоболевский И.И. Сборник задач по теории механизмов и машин: учеб. пособие для вузов / И.И. Артоболевский, Б.В. Эдельштейн. – 3-е изд., стер. – М.: Альянс, 2009. – 256 с.
11.Безвесельный Е.С. Вопросы и задачи по теории механизмов и машин: учеб. пособие для вузов: пер. с укр. / Е.С. Безвесельный. – Киев: Вища
шк., 1977. – 400 с.
68

Учебное издание
Шафранов Алексей Владимирович
СТРУКТУРНЫЙ АНАЛИЗ И СИНТЕЗ МЕХАНИЗМОВ
Учебное пособие
Редактор и корректор Е.В. Копытина
__________________________________________________________
Подписано в печать 27.12.2012. Формат 60×90/8. Усл. печ. л. 9,0. Тираж 100 экз. Заказ № 294/2012.
Издательство Пермского национального исследовательского
политехнического университета.
Адрес: 614990, г. Пермь, Комсомольский проспект, 29, к. 113.
Тел. (342) 219-80-33.