

Структурный анализ и синтез механизмов
..pdfпары: во вращательную пару в центре кривизны О2 профиля кулачка в месте контакта и во вращательную пару в точке контакта С. В результате замены высшей кинематической пары получается кривошипно-ползунный механизм (рис. 5.3, б).
Пример 5.4.
Для механизма на рис. 5.4, а одним из элементов высшей кинематической пары является прямая АС, а другим – точка С.
аб
Рис. 5.4. Схемы механизмов:
а – основного; б – заменяющего кулисного
Замена сводится к постановке заменяющего звена, входящего в одну поступательную и одну вращательную пары. Ось вращательной пары и ось движения поступательной пары должны проходить через точку контакта С. Заменяющий кулисный механизм показан на рис. 5.4, б.
З а м е ч а н и е: заменяющий механизм эквивалентен основному механизму только в рассматриваемом положении. Если построить заменяющий механизм для других положений, то его структура останется той же, но размеры звеньев изменятся, так как сместятся центры кривизны элементов высшей кинематической пары. Следовательно, при кинематическом и динамическом исследовании механизмов с высшими кинематическими парами их аналоги с низшими кинематическими парами будут иметь переменные по величине звенья. В рассмотренных примерах исключением является механизм на рис. 5.4.
5.2. СТРУКТУРНЫЙ СИНТЕЗ МЕХАНИЗМОВ ПО АССУРУ–АРТОБОЛЕВСКОМУ
Классификация механизмов может быть произведена по различным признакам. Русские ученые Л.В. Ассур, И.И. Артоболевский, В.В. Добровольский и другие создали структурную классификацию механизмов, устанавливающую принцип построения механизмов с замкнутыми кинематическими цепями [1].
51

Основной принцип образования механизмов: любой механизм может быть образован последовательным присоединением к начальному звену или к начальным звеньям (если их несколько) и к стойке кинематических цепей с нулевой степенью подвижности относительно тех звеньев, к которым цепь присоединяется.
Кинематические пары, которыми звенья кинематической цепи соединяются между собой, называются внутренними. Кинематические пары, которыми звенья кинематической цепи присоединяются к другим звеньям или стойке – внешними.
Кинематическая цепь с нулевой степенью подвижности относительно внешних кинематических пар, не распадающаяся на более простые цепи нулевой степени подвижности, называется структурной группой (или
группой Ассура) [1].
Механизм, который нельзя более расчленить на части, способные самостоятельно преобразовывать движение, называется элементарным механизмом или механизмом I класса [1, 4].
Элементарный механизм представляет собой начальное звено и стойку, соединенные между собой посредством кинематической пары (рис. 5.5), и всегда имеет незамкнутую кинематическую цепь [4].
W = 1 |
W>1 |
|
W = 2 |
W = 3
W = 3
Рис. 5.5. Механизмы I класса
52

Степень подвижности плоской структурной группы, в состав которой входят только низшие кинематические пары,
Wгр = 3 n − 2 p5 = 0 , |
(5.3) |
следовательно,
p5 |
= |
3 |
n . |
(5.4) |
|
||||
|
2 |
|
|
|
Так как количества звеньев и кинематических пар могут быть только целыми, то условию (5.4) удовлетворяют только следующие сочетания количества звеньев n и кинематических пар р:
n |
2 |
4 |
6 |
8 |
10 |
… |
|
|
|
|
|
|
|
p5 |
3 |
6 |
9 |
12 |
15 |
… |
Задаваясь различными сочетаниями этих чисел, получают группы различного вида, которые можно разбить по классам.
Порядок группы определяется количеством элементов внешних кинематических пар, которыми группа присоединяется к основному механизму.
Группа, состоящая из двух звеньев и трех кинематических пар V класса, называется структурной группой II класса второго порядка (II2).
В зависимости от размещения вращательных и поступательных кинематических пар структурные группы II класса подразделяются на пять видов. Первым видом групп II класса (II1) называется группа Ассура, имеющая в своем составе два звена и три вращательных кинематических пары
(рис. 5.6, а).
а |
б |
в |
Рис. 5.6. Структурная группа II1 (а) и образованные с ее помощью простые одноподвижные механизмы (б, в)
53

Присоединение группы II1 к основному механизму производится двумя поводками BC и DC.
В зависимости от вида движения начального звена механизма I класса, к которому эта группа присоединяется, могут быть образованы простые одноподвижные механизмы: шарнирный четырехзвенник (рис. 5.6, б) или ползунно-кривошипный (рис. 5.6, в).
Простой механизм – механизм, состоящий из элементарного(ных) механизма(ов) с присоединенной к нему (ним) только одной структурной группой [4].
Присоединяя структурную группу II1 к двум элементарным механизмам, можно получить различные виды простых двухподвижных механиз-
мов (рис. 5.7).
Рис. 5.7. Простые двухподвижные механизмы, образованные с помощью структурной группы II1
Таким образом, порядок структурной группы соответствует наивысшей возможной степени подвижности образованных с ее помощью простых механизмов.
Все виды структурных групп II класса, начиная со второго, образуются путем замены отдельных вращательных кинематических пар поступательными.
Вторым видом групп II класса (II2) является тот, при котором поступательной парой заменена одна из внешних вращательных пар (рис. 5.8, а, б).
Присоединив группу II2 к элементарному механизму, состоящему из стойки и кривошипа, получают простой одноподвижный кривошипноползунный механизм (рис. 5.8, в).
54

а |
б |
в |
Рис. 5.8. Структурная группа II2 (а, б) и образованный
сее помощью кривошипно-ползунный механизм (в)
Ктретьему виду структурных групп II класса (II3) относятся группы,
вкоторых поступательной парой заменена внутренняя вращательная пара
(рис. 5.9, а, б).
а |
б |
в |
Рис. 5.9. Структурная группа II3 (а, б) и образованный
сее помощью кулисный механизм (в)
Спомощью группы II3 и одного элементарного механизма можно получить простой одноподвижный кулисный механизм, изображенный на рис. 5.9, в.
Четвертый вид структурных групп II класса (II4) получается за счет замены двух внешних вращательных пар поступательными (рис. 5.10, а, б).
а |
б |
в |
Рис. 5.10. Структурная группа II4 (а, б) и образованный с ее помощью тангенсный механизм (в)
55

Образованный с помощью группы II4 простой одноподвижный тангенсный механизм представлен на рис. 5.10, в (перемещение выходного звена 3 является тангенсом угла поворота входного звена 1).
Пятый вид групп II класса (II5) (рис. 5.11, а, б) получается при замене в структурной группе II1 одной внутренней и одной внешней вращательных кинематических пар поступательными.
а |
б |
в |
Рис. 5.11. Структурная группа II5 (а, б) и образованный
сее помощью синусный механизм (в)
Спомощью группы II5 и одного элементарного механизма получается простой одноподвижный синусный механизм, изображенный на рис. 5.11, в (перемещение выходного звена 3 является синусом угла поворота входного звена 1).
Если заменить все три вращательные кинематические пары струк-
турной группы II1 поступательными и присоединить полученную кинематическую цепь к стойке, то получится одноподвижный клиновой механизм (см. рис. 4.8, а).
Класс структурной группы выше второго определяется количеством внутренних кинематических пар, входящих в наиболее сложный замкнутый контур [1].
Следующее возможное сочетание количества звеньев и кинематических пар структурной группы – это четыре звена и шесть пар. Для этого сочетания могут быть получены три различных типа кинематических цепей:
1. Кинематическая цепь (рис. 5.12, а) имеет в своем составе базисное звено GEF, образующее жесткий треугольный замкнутый контур, и три поводка BG, ED и FC, которыми она присоединяется к основному механизму. Эта сложная незамкнутая кинематическая цепь является структур-
ной группой III класса третьего порядка (III3).
В зависимости от количества элементарных механизмов с помощью структурной группы III класса третьего порядка могут быть образованы одно-, двухили трехподвижные простые механизмы (рис. 5.12, б, в, г соответственно).
56

а |
б |
в |
г |
Рис. 5.12. Структурная группа III3 (а) и образованные
сее помощью простые механизмы (б, в, г)
2.Кинематическая цепь (рис. 5.13, а), состоящая также из четырех звеньев и шести кинематических пар, кроме двух базисных звеньев BCD
иEGF имеет один подвижный четырехсторонний замкнутый контур CEFD.
а |
б |
в |
Рис. 5.13. Структурная группа IV2 (а) и образованные с ее помощью простые механизмы (б, в)
Эта сложная замкнутая кинематическая цепь присоединяется к основному механизму не элементами поводков, а свободными элементами внешних кинематических пар G и B, принадлежащими базисным звеньям BCD и EGF. Данная группа относится к IV классу второго порядка (IV2).
57

Структурная группа IV2 допускает образование как одноподвижного (рис. 5.13, б), так и двухподвижного (рис. 5.13, в) простых механизмов.
3. От группы Ассура не может быть отделена кинематическая цепь, удовлетворяющая условию Wгр = 0, без разрушения самой группы. Если такое отделение возможно, то исследуемая кинематическая цепь представляет собой совокупность нескольких групп Ассура.
Кинематическая цепь (рис. 5.14), состоящая из четырех звеньев и шести кинематических пар, распадается на две простейшие группы II класса и потому структурной группой не является.
Рис. 5.14. Кинематическая цепь, распадающаяся на две структурные группы
В каждом классе, начиная с третьего, можно создать более сложные группы. Например, добавляя к трехповодковой группе (рис. 5.12, а) два звена LM и DN и три кинематических пары L, М, N, получают группу (рис. 5.15)
III класса четвертого порядка (III4) [7].
Рис. 5.15. Схема структурной группы III4
Присоединяемые к основному механизму структурные группы не влияют на подвижность образуемого механизма [4], поскольку обладают нулевой степенью подвижности. Они только изменяют его структуру и законы движения звеньев. Механизм, состоящий из элементарного(ых) механизма(ов), к которому(ым) присоединены две или более структурных группы, называют сложным [4].
58

При последовательном присоединении групп необходимо руководствоваться определенными правилами (рис. 5.16). При образовании механизма с одной степенью свободы первая группа присоединяется элементами внешних кинематических пар к начальному звену и стойке.
Рис. 5.16. Основной принцип образования механизмов
Последующие группы могут присоединяться к любым звеньям полученного механизма только так, чтобы звенья присоединяемой группы обладали подвижностью друг относительно друга. Например, если на рис. 5.17 структурную группу II1 (звенья 4 и 5) присоединить к одному и тому же звену 2, то образованный контур будет жестким, т.е. будет фермой [1].
Рис. 5.17. Образование сложного рычажного механизма
Пример 5.5.
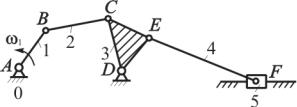
Степень подвижности плоского механизма грохота (рис. 5.18)
W = 3n − 2 p5 − p4 = 3 5 − 2 7 − 0 =1.
59
Если за начальное звено принять звено 1, то относительная степень подвижности оставшихся звеньев 2, 3, 4 и 5
3n − 2 p5 = 3 4 − 2 6 = 0 .
Рис. 5.18. Схема механизма грохота
Анализируя оставшуюся часть механизма, можно видеть, что к начальному звену и к стойке присоединена группа из двух звеньев 2 и 3. Вторая группа также состоит из двух звеньев 4 и 5. Звеном 4 она присоединена к звену 3 первой группы и звеном 5 со стойкой образует поступательную кинематическую пару. Каждая из этих групп, состоящая из двух звеньев и трех кинематических пар V класса, обладает степенью относительной подвижности
Wгр = 3n − 2 p5 = 3 2 − 2 3 = 0 .
Таким образом, данный плоский механизм, обладающий одной степенью подвижности, может рассматриваться как образованный последовательным присоединением к элементарному механизму (звенья 0 и 1) структурной группы II1 (звенья 2 и 3) и структурной группы II2 (звенья 4 и 5).
Класс механизма определяется высшим классом структурных групп, входящих в его состав.
При определении класса механизма необходимо указывать, какие из звеньев являются начальными, так как в зависимости от выбора начальных звеньев может изменяться класс и структура механизма. Например, если в механизме, показанном на рис. 5.12, б, за начальное звено принять не звено 1, а звено 4, то весь механизм будет механизмом II класса как образованный группами II1 (звенья 3 и 5) и II1 (звенья 1 и 2).
Принцип образования механизмов можно распространить как на плоские механизмы с высшими кинематическими парами, так и на пространственные механизмы.
Так, для плоских механизмов с высшими кинематическими парами степень подвижности группы Ассура [4]
Wгр = 3n − 2p5 − p4 = 0,
60