

Исследование равновесия и движения механической системы (90
..pdfМИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ Государственное образовательное учреждение высшего профессионального образования
«Оренбургский государственный университет»
Кафедра теоретической механики и теории механизмов и машин
Г.В. КУЧА И.И. МОСАЛЕВА
ИССЛЕДОВАНИЕ РАВНОВЕСИЯ И ДВИЖЕНИЯ МЕХАНИЧЕСКОЙ СИСТЕМЫ
МЕТОДИЧЕСКИЕ УКАЗАНИЯ к курсовой работе
по дисциплине «Теоретическая механика»
Рекомендовано к изданию Редакционно-издательским советом государственного образовательного учреждения
высшего профессионального образования «Оренбургский государственный университет»
Оренбург 2007
УДК 531.2 (07) ББК 22.27
К 95
Рецензент кандидат технических наук, профессор Р.В. Ромашов
Куча Г.В.
К95 Исследование равновесия и движения механической системы:
методические указания к курсовой работе по дисциплине «Теоретическая механика» / Г.В. Куча, И.И. Мосалева – Оренбург:
ГОУ ОГУ, 2007 - 34с.
Методические указания включают варианты контрольного задания, пример выполнения задания и вопросы для самопроверки.
Методические указания предназначены для выполнения расчетно – графической работе по дисциплине «Теоретическая механика» для студентов специальностей 190601.65 (ААХ), 190601.65 (ААХу), 190603.65 (СТТМ), 151001.65 (ТМ), 150002.65 (МСК), 150205.65 (ТПИ), 220301.65 (АТП)
ББК 22.27
© Куча Г.В., 2007
Мосалева И.И. © ГОУ ОГУ, 2007
Содержание
Введение............................................................................................................................................................................ |
4 |
1 Вопросы для самоконтроля........................................................................................................................................... |
5 |
2. Контрольное задание Д20 ............................................................................................................................................ |
6 |
2.1 Содержание задания ............................................................................................................................................... |
6 |
2.2 Пример выполнения задания ............................................................................................................................... |
15 |
Список использованных источников............................................................................................................................ |
39 |
Введение
В методических указаниях исследуется различные состояния механической системы (ее равновесие и движение) при помощи принципов аналитической механики и общих теорем динамики системы.
4
1 Вопросы для самоконтроля
1.Какая классификация сил, действующих на систему, применяется в динамике системы?
2.Что называется осевым моментом инерции точки и системы?
3.Что называется радиусом инерции тела относительно оси?
4.В чем состоит теорема о зависимости между моментами инерции тела относительно двух параллельных осей?
5.Что называется количеством движения материальной точки и системы?
6.Чему равно количество движения тела, вращающегося вокруг неподвижной оси, проходящей через его центр масс?
7.В чем состоит теорема об изменении количества движения системы?
8.Какое перемещение материальной точки называется действительным, возможным?
9.При каких связях действительное перемещение принадлежит к числу
возможных?
10.Зависят ли возможные перемещения от действующих на механическую систему сил?
11.Что называется возможной работой?
12.Какие связи называются идеальными? Приведите примеры.
13.Условие какого состояния системы определяет принцип возможных перемещений?
14. Сформируйте принцип возможных перемещений.
15.Что называется: обобщенной координатой, обобщенной скоростью, обобщенной силой?
16.Чему равно число степеней свободы механической системы?
17.Как определяется обобщенная сила? Какова ее размерность?
18.Как записываются дифференциальные уравнения движения системы в обобщенных координатах (уравнения Лагранжа II рода)? Чему равно число этих уравнений для данной механической системы?
19.Запишите аналитические условия равновесия произвольной системы сил, действующих на твердое тело в обобщенных координатах.
20.Чему равен момент равнодействующей системы сил, приложенных к твердому телу, относительно точки и оси?
21.Сколько существует форм условий равновесия плоской системы сил? Сформулируйте каждое из них.
22.Сколько независимых уравнений можно составить для плоской системы сочлененных тел?
23.В чем заключается метод расчленения?
5

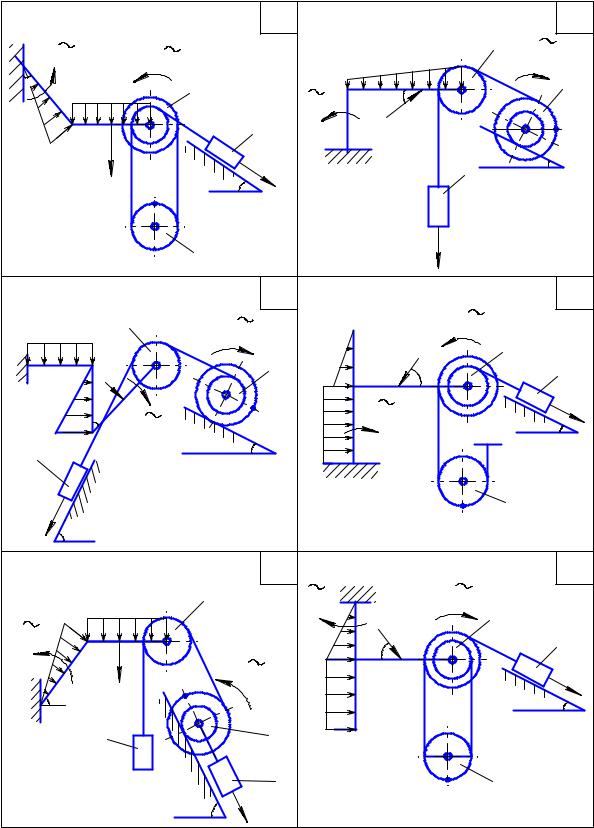
2. Контрольное задание Д20
2.1 Содержание задания
Для изображенной на рисунках 1 – 4 в вертикальной плоскости механической системы найти модуль алгебраического момента М пары сил (или силы Р) при равновесии системы, реакции в точках А и В, а также натяжения нитей, как при равновесии, так и при движении, которое необходимо исследовать, увеличив вдвое модуль найденного при равновесии момента М (или силы Р).
Содержание исследования:
а) определить закон движения системы; б) найти зависимость скорости точки С от пройденного ею пути;
в) вычислить количество движения системы в произвольный момент времени; г) найти скорость и ускорение точки L в момент времени t1=1с, если точка в этот момент занимает указанное на рисунке положение; д) вычислить динамические добавки* компонентов реакции заделки А.
Данные для исследования берутся из таблицы и рисунков, причем номер рисунка равен номеру Вашей фамилии в групповом журнале, а строка из таблицы выбирается по начальной букве Вашего имени.
Весом балки АВ и тела 4, если оно имеется, пренебречь, все тела считать однородными. Для ступенчатого тела 2 задается радиус инерции ρ относительно горизонтальной оси, перпендикулярной плоскости рисунка и проходящей через его центр масс. Номер индекса какой – либо величины соответствует номеру тела на рисунке.
Коэффициент трения скольжения f задается для груза, а коэффициент трения качения δ- для катка.
Нити идеальные и движутся без проскальзывания так же, как и каток. Прочерк у какой-либо величины в таблице означает отсутствие этой величины в Вашем варианте, знак (+) у М (или силы Р) означает, что эта величина подлежит определению при равновесии.
Если какая-либо величина указана на рисунке и в таблице, то принимать нужно то значение, которое указано на рисунке.
* |
Примечание: под динамической добавкой какого-либо компонента |
|
реакции понимается разница между его значениями при движении и равновесии.
6
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
3 |
|
2 |
А M |
|
|
|
|
|
|
|
_ |
|
|
_ |
M |
|
|||
|
|
|
|
|
|
|
|
|
2 |
|
|
|||||
|
|
|
M |
|
|
|
|
|
|
|
q |
|
2 |
|||
|
1 |
|
|
|
|
|
|
q |
1 |
|
|
|
|
|
||
b |
_ |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
К |
|
b |
Е |
В |
|
|
|
|||
|
q2 |
|
|
|
|
|
|
M1 |
|
|
|
|
|
|||
|
|
|
|
|
|
1 |
|
|
|
_ |
|
|
|
|
L |
|
q_1 |
К |
Е |
|
|
В |
|
|
А |
|
F |
|
|
|
|
||
_ |
|
- |
|
|
|
|
|
|
a |
|||||||
|
|
|
F |
|
|
|
|
|
|
|
|
1 |
|
|||
2R3 =R2 +r2 |
|
|
L |
a Р |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
C |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
d=0 |
|
|
|
C |
3 |
|
|
|
|
|
|
|
- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Р |
|
|
|
q_2 |
|
|
3 |
|
|
|
3 |
|
|
|
|
|
|
|
|
4 |
|
К |
|
В |
M |
|
|
|
F |
_ |
|
M |
2 |
|
|
||
А |
|
_ |
|
|
2 |
_ |
|
К |
F |
b |
|
|
1 |
|||
|
|
|
|
|
|
Е |
|
|
||||||||
|
F |
|
|
|
|
q2 |
|
|
|
Р- |
||||||
_ |
|
b F |
|
C |
L |
|
|
|
|
M1 |
|
В |
|
|
||
|
M1 |
|
|
|
|
|
|
|
a |
|||||||
|
|
|
|
|
|
|
|
|
|
|||||||
q1 |
Е |
|
|
a |
|
_ |
|
|
|
|
|
|
||||
1 |
|
|
|
|
|
|
А |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
q1 |
|
|
|
C |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
- |
|
|
|
|
КЕ=EF |
|
|
КЕ=КF |
|
L |
3 |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|||||||
Р |
a |
|
|
|
|
|
|
|
d=0 |
|
|
|
|
|
||
|
|
|
|
|
3 |
|
5 |
|
|
|
|
|
|
|
|
6 |
_ |
q_2 |
|
|
|
|
|
M1 |
|
А |
|
|
M |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
q1 |
|
|
|
|
|
|
|
|
|
_ |
|
|
|
1 |
||
M1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
К |
|
Е |
|
В |
|
|
_ |
|
|
b F |
|
В |
|
|
- |
|
|
|
_ |
|
L |
M |
|
q1 |
|
К |
Е |
|
|
|
Р |
||
b |
F |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
||
А |
1 |
|
|
|
|
2 |
q_2 |
|
F |
|
|
|
|
|
|
|
|
|
C |
|
|
|
|
|
C |
2R3 =R2 +r2 |
|||||||
|
|
|
|
|
|
4 |
|
КЕ=КF |
|
|||||||
m4 =m3 |
|
|
|
|
- |
|
|
L |
3 |
|
|
|||||
|
|
|
|
|
|
d=0 |
|
|
|
|
||||||
|
|
|
|
|
a Р |
|
|
|
|
|
|
|
||||
|
|
|
|
|
Рисунок 1 – Схемы механизмов |
|
|
|
||||||||
7
|
|
|
|
|
3 |
1 |
7 |
|
|
M1 |
|
|
8 |
|
M1 |
А |
|
_ |
- |
|
К |
|
1 |
|
|||
|
_ |
|
|
_ |
|
|
|||||||
_ |
|
2 |
|
|
Р |
|
|
|
- |
||||
|
|
q1 |
q |
|
|
|
|
b |
q2 |
|
|
||
F |
a |
|
|
|
|
|
|
|
|
Р |
|||
|
|
В |
|
|
|
|
|
|
|
||||
F |
К |
|
Е |
|
|
|
|
|
|
|
|
||
|
|
b |
|
|
|
|
|
В |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
2 |
|
3 |
|
|
|
|
|
|
|
|
|
_ |
А |
M |
|
||
|
|
|
|
|
|
|
|
|
|
|
|||
|
M |
C |
|
4 |
|
КЕ=КF |
q1 |
|
_ |
|
C |
|
|
|
|
|
|
|
|
|
|
F |
|
|
|
||
|
|
|
2 |
|
d=0 |
|
|
|
a |
||||
|
|
L |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
M |
|
9 |
|
|
|
M1 |
|
10 |
|
|
|
3 |
|
|
C |
L |
4 |
|
_ |
В |
|
|
M1 |
|
|
|
|
|
|
|
|
|
|
|||
|
А |
|
|
|
|
|
|
|
F |
|
2 |
|
|
|
|
|
В |
_ |
|
2 |
Е |
|
F |
|
|
||
|
|
|
|
|
|
К |
|
|
|||||
|
|
|
|
|
F |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
_ |
|
|
|
M |
||
|
_ |
b |
|
|
|
|
|
|
|
|
|||
|
_ |
|
|
|
|
|
q2 |
|
|
|
|||
|
q1 |
|
|
|
|
|
|
|
C |
|
|
||
|
К |
|
q2 |
|
|
|
|
|
А |
_ |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
1 |
|
|
|
|
Р- |
q1 |
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
- |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
Р |
|
|
|
|
|
КЕ=КF |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
_ |
|
_ |
11 |
4 |
|
2 |
M1 |
|
12 |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
q1 |
|
F |
|
|
|
|
|
|
|
|
|
|
|
|
b M |
|
|
|
|
|
|
||
|
Е |
|
|
|
|
Е |
|
В |
|
|
|
||
|
|
|
|
В |
|
|
|
|
|
|
|||
|
|
|
К |
|
|
|
_ |
|
|
|
|
|
|
|
|
|
|
|
L |
2 |
F |
b |
|
q_2 |
|
3 |
|
4 |
M1 |
|
|
|
|
b |
|
L |
|||||
А |
|
|
C |
|
|
1 |
К |
|
|
M |
|||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
3 |
- |
q_1 |
|
|
C |
|
2R3 =R2 |
+r2 |
|
|
1 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|||||||
d=0 |
|
|
a |
- |
|
|
Р |
А |
|
a |
|
||
|
|
Р |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
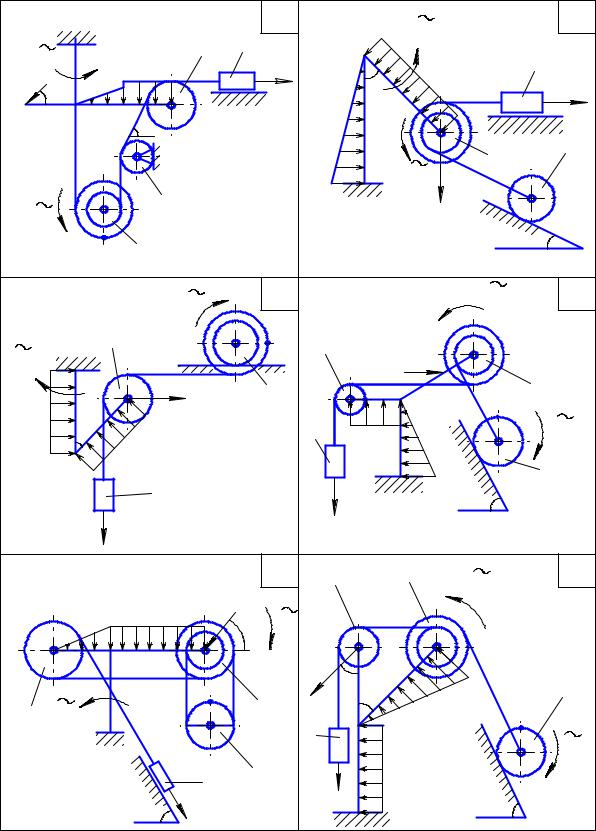
Рисунок 2 – Схемы механизмов |
|
|
|
|||||
8
|
|
|
|
|
_ |
|
13 |
|
|
_ |
|
|
|
14 |
|
|
|
q_1 |
|
F |
|
|
|
Е |
q2 |
M1 |
|
1 |
|
|
M1 |
К |
|
a |
Е |
M |
_ |
|
|
- |
||||
|
|
b |
|
|
|
|
q1 |
b |
|
|
|
Р |
||
|
|
|
|
C |
L |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
В |
|
|
|
|
|
|
|
В |
|
|
|
|
|
|
А |
|
|
|
|
3 |
|
|
|
|
|
|
||
|
|
|
|
_ |
|
А |
К |
|
|
_ |
2 |
|
||
|
|
|
|
q2 |
|
|
|
|
|
|||||
|
2 |
|
|
|
|
|
|
|
a F |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
M |
C |
|
3 |
|
d=0 |
|
|
Р- |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
M |
|
q_1 |
|
|
|
15 |
КЕ=ЕF |
|
|
|
|
16 |
|
|
|
_ |
|
|
|
d=0 |
_ |
А |
|
M |
4 |
|
||
|
|
|
|
|
|
|
|
|
1 |
_ |
|
|||
|
|
|
|
q2 |
|
|
|
|
1 |
|
|
|
|
|
|
В |
|
|
|
|
4 |
|
3 |
q |
|
|
|
F |
|
|
К |
|
|
|
F |
|
|
В |
|
|||||
2 |
|
|
|
|
|
Е |
|
|
|
|
||||
|
|
b |
Е |
|
|
|
|
b |
|
|
|
|||
|
|
|
|
|
|
|
1 |
|
К |
|
L |
|
|
|
|
C |
А |
M |
|
|
1 |
|
_ |
2 |
|
||||
|
_ |
|
|
|
|
q2 |
|
|||||||
|
|
|
|
1 |
|
|
|
|
C |
|
||||
|
L |
|
|
|
F |
|
|
- |
|
|
|
|
|
|
|
3 |
|
|
|
- |
|
|
|
|
|
|
|||
|
d=0 |
|
|
a |
Р |
|
|
|
|
M |
|
|||
|
|
|
|
|
Р |
|
|
|
|
|
|
|||
|
|
|
|
|
q_2 |
|
17 |
|
|
|
|
|
|
18 |
M |
F_ |
|
_ К |
|
|
4 |
q_1 |
К |
_ |
|
|
|
||
|
|
q1 |
|
|
|
M1 |
_ |
|
|
q2 |
|
|
|
|
|
|
|
|
|
b |
|
|
b |
|
|
2 |
|
||
|
F |
|
|
|
|
|
|
F |
|
|
|
|
||
|
|
- |
Е |
|
В |
|
|
|
|
|
|
|||
|
|
|
|
|
Е |
|
|
|
|
|
||||
4 |
|
|
|
|
|
|
|
|
|
|
|
|||
1 |
|
Р |
А |
|
|
2 |
1 |
- |
M1 |
В |
|
|
||
|
|
|
|
|
|
|
||||||||
|
|
|
L |
C |
|
|
|
Р |
А |
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
C |
|
|
|||
|
ЕF=2КЕ 3 |
|
|
|
|
|
|
|
|
|
|
|||
|
|
a |
|
|
|
|
a L M |
|
||||||
|
|
|
|
|
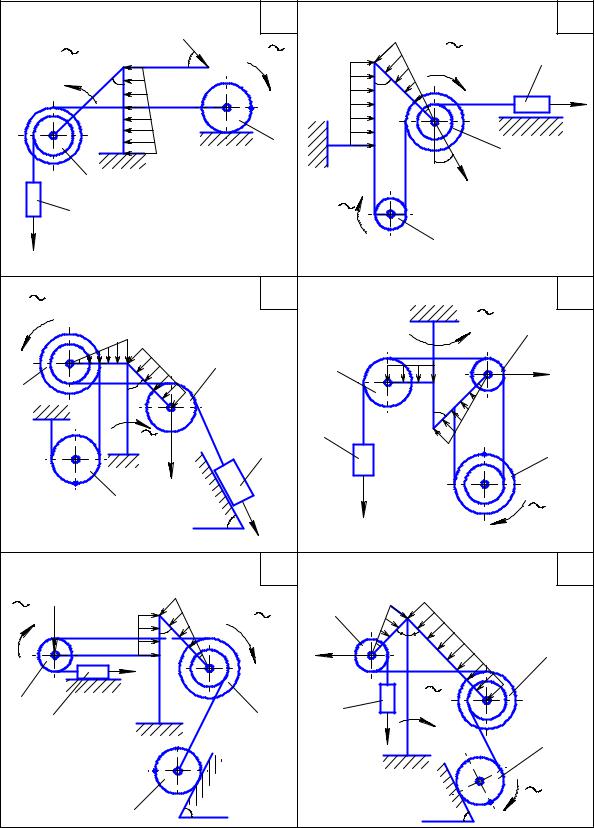
Рисунок 3 – Схемы механизмов |
|
|
|
|
|||||
9
2R3 =R2 +r2 |
q_1 |
|
|
4 |
19 |
||
d=0 |
_ |
А |
Е |
|
|||
|
|
|
|
|
|
|
|
|
|
F |
|
b |
|
M1 |
|
|
a В |
|
|
|
|||
|
|
q_2 |
|
|
|||
|
3 |
|
К |
1 |
|
||
|
|
|
|
|
|
||
|
|
C |
|
|
|
|
|
|
2 |
L |
M |
Р- |
|
||
|
2R3 =R2 +r2 |
_ |
|
|
d=0 |
21 |
|
|
|
|
F |
q_1 |
|
|
|
|
|
a К |
|
2 |
|
||
|
4 |
M1 |
|
|
|
|
|
|
b |
|
|
|
|||
|
|
|
|
|
|
||
|
|
Е |
А |
В |
|
M |
|
|
1 |
q_2 |
|
|
L |
|
|
|
|
|
|
|
|
||
|
Р- |
|
C |
|
|
|
|
|
|
|
|
3 |
23 |
||
|
|
4 |
|
|
|
|
|
|
|
F |
|
|
|
3 |
|
|
|
|
|
Е |
|
В |
|
|
|
_ |
q_1 |
b |
|
||
|
|
F |
|
К |
|
q_2 |
|
M |
|
M1 |
|
|
|||
|
А |
|
|
1 |
|||
2 |
|
C |
|
|
Р- |
||
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
L |
a |
КЕ=ЕF |
|
|
||
|
|
|
|
|
|||
|
|
|
|
|
|
|
20 |
|
|
|
|
А |
_ |
|
|
|
|
|
|
|
q1 |
|
|
|
|
|
|
|
_ |
|
|
M L |
|
3 |
q_2 |
F |
|
Е |
|
|
b |
4 |
|||||
|
|
|
В |
К |
|||
|
|
|
|
|
|
||
|
a |
|
M1 |
2 |
1 |
|
|
|
|
|
|
- |
|||
|
|
|
|
|
|||
|
|
|
|
|
|
|
Р |
4 |
|
_ |
|
КF=FЕ |
|
22 |
|
|
|
|
|
|
|
||
|
q1 |
А |
|
|
|
|
|
|
Е |
|
M |
|
|
|
|
|
|
|
F |
1 |
|
|
|
|
|
|
|
M |
|
|
|
|
_ |
|
_ |
|
|
||
|
К |
q2 |
|
|
|
||
|
F |
|
|
|
|
L |
|
|
|
|
b |
|
C |
|
|
|
|
|
|
|
|
||
Р- |
1 |
В |
|
|
|
||
|
|
|
|
||||
|
|
2 |
3 |
|
|
|
|
|
|
|
|
|
|
|
24 |
|
|
|
А q_1 |
M1 |
2 |
|
|
|
q_2 |
|
|
|
|
|
|
|
|
|
В |
|
|
|
|
|
|
|
b К |
_a |
|
|
|
|
|
|
|
|
|
||
|
Е |
|
|
|
F |
M |
|
|
|
|
|
|
|||
|
|
|
4 |
1 |
C |
|
L |
|
|
|
|
|
|
||
|
|
|
Р- |
3 |
|
|
|
1