

Леонтева Сборник лабораторныкх работ по физике Мекханика 2015
.pdf
|
|
|
|
|
Таблица 13.1 |
||
|
|
|
|
|
|
|
|
Длина |
Число |
Время |
Период |
Т2 |
|
|
|
нити l′, |
колебаний |
колебаний |
колебаний |
|
g |
|
|
см |
п |
t |
Т |
|
|
|
|
150 |
|
|
|
|
|
|
|
125 |
|
|
|
|
|
|
|
… |
|
|
|
|
|
|
|
50 |
|
|
|
|
|
|
|
5.Определите из графика угловой коэффициент и по нему найдите ускорение свободного падения g. Запишите результат в табл.
6.Найдите погрешность g определения g, которая зависит от точности определения углового коэффициента наклона графика (см. рис. 13.2). Порядок этой погрешности оцените сами по построенному графику. Окончательный ответ запишите в виде
g = g ± g .
2. ИЗУЧЕНИЕ КОЛЕБАНИЙ УПРУГОГО МАЯТНИКА
Упругим маятником называется материальная точка, подвешенная на невесомой пружине (рис. 13.3). Период колебания упругого маятника равен
T = 2π |
m |
, |
(13.3) |
|
k |
||||
|
|
|
где m – масса маятника, k – коэффициент упругости пружины.
Возведя (13.3) в квадрат, получим
T 2 = |
4π2 |
m. |
(13.4) |
Рис. 13.3 |
k |
|
|||
|
|
|
|
Как видим, квадрат периода колебаний пропорционален массе маятника. Коэффициент пропорциональности зависит от коэффициента упругости пружины k. Измерив период колебаний при различных массах маятника т, можно определить коэффициент упругости пружины k.
101
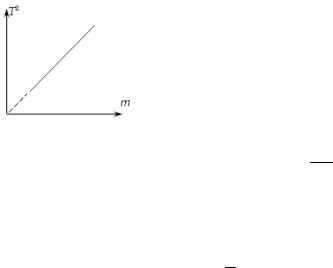
Цель второй части работы состоит в проверке соотношения (13.3) и определении величины коэффициента упругости пружины k.
Для этого необходимо измерить период колебаний маятника при различных массах груза. Результаты измерений следует изобразить на графике зависимости квадрата периода от массы груза. Согласно (13.4) график должен иметь вид прямой линии (см. рис. 13.4), угловой коэффициент наклона которой a зависит от величины k:
T 2 = al, a = 4kπ2 .
Для обеспечения необходимой точности результатов, следует измерять период с максимальной точностью. Для этого необходимо измерить продолжительность t достаточно большого числа п колебаний, тогда период определится как отношение
T = nt .
Очевидно, что ошибка измерения времени t секундомером не превосходит величины периода Т. Поэтому погрешность определения периода тем меньше, чем больше число колебаний п. Для обеспечения погрешности порядка 1–2 % следует измерять продолжительность порядка 50–100 колебаний для каждого груза.
В условиях вашего эксперимента вы располагаете набором одинаковых грузов. Поэтому вы можете нагружать маятник грузами с массами т, 2т, 3т, …
Порядок выполнения работы
1.Приведите маятник в колебание, слегка оттянув вниз подвешенный груз. В момент прохождения им одного из крайних положений включите секундомер и определите t время не менее 50 колебаний. Поделив время t на число полных колебаний, определите период колебаний маятника. Измерения занесите в табл. 13.2.
2.Проделайте эти измерения для грузов с удвоенной, утроенной и т.д. массой. Измерения занесите в табл. 13.2.
102

3. Повторите п. 2 5–7 раз, измерения занесите в табл. 13.2.
|
|
|
|
|
Таблица 13.2 |
||
|
|
|
|
|
|
|
|
Масса |
Число |
Время |
Период |
Т 2 |
|
k |
|
груза |
колебаний |
колебаний |
колебаний |
|
|
||
т, г |
п |
t |
Т |
|
|
|
|
m |
|
|
|
|
|
|
|
2т |
|
|
|
|
|
|
|
3т |
|
|
|
|
|
|
|
… |
|
|
|
|
|
|
|
4.По данным таблицы постройте график согласно рис. 13.4.
5.Определите из графика его угловой коэффициент и по нему найдите коэффициент упругости пружины k. Запишите результат в табл. 13.2.
6.Найдите погрешность k определения k, которая зависит от точности определения углового коэффициента наклона графика (см. рис. 13.4). Порядок этой погрешности оцените сами по построенному вами графику. Окончательный ответ запишите в виде:
k = k ± k .
КОНТРОЛЬНЫЕ ВОПРОСЫ
1.Что называется математическим маятником?
2.Влияет ли масса маятника на точность измерения?
3.Почему в данной работе рекомендуется период колебаний определять, используя для этого моменты времени, когда маятник находится в крайнем положении? Почему не следует определять период по прохождению шарика через положение равновесия?
4.Изобразите вектор ускорения маятника:
•в крайних точках траектории,
•при прохождении маятником положения равновесия,
•а также в какой-либо точке между крайним положением и положением равновесия.
5. Согласно (13.1) период колебаний математического маятника не зависит от его амплитуды. Строго говоря, это верно лишь для колебаний с малой амплитудой. Если амплитуда не мала, то период
103
будет зависеть от амплитуды. А как именно будет зависеть период от величины амплитуды, будет ли он расти с ростом амплитуды, или же убывать?
6. Почему легко балансировать поставленным вертикально на ладонь длинным стержнем и невозможно проделать то же самое с карандашом?
104

Работа № 14
ОПРЕДЕЛЕНИЕ УСКОРЕНИЯ СИЛЫ ТЯЖЕСТИ ОБОРОТНЫМ МАЯТНИКОМ
Цель работы: определение ускорения силы тяжести оборотным маятником.
Приборы и принадлежности: оборотный маятник, секундомер, штангенциркуль.
ВВЕДЕНИЕ
Наиболее распространённым и точным методом определения ускорения силы тяжести является метод, основанный на измерении периода колебаний физического или математического маятника. В данной работе для этой цели используется физический маятник.
Физическим маятником называется твёрдое тело, которое способно колебаться (под действием силы тяжести) вокруг горизонтальной оси, не проходящей через центр тяжести. Такой маятник схематически изображён на рис. 14.1. Точка О – проекция горизонтальной оси маятника на вертикальную плоскость, С – центр тяжести маятника, d – расстояние от центра до оси вращения, Р = mg – сила тяжести, g – ускорение силы тяжести, m – масса маятника, I – момент инерции маятника относительно оси вращения.
Период колебаний физического маятника
T = 2π |
I |
. |
(14.1) |
|
|||
|
mgd |
|
|
Из формулы (14.1) можно выразить g через I, m и d, но точно определить I и d невозможно, поэтому непосредственно использовать (14.1) для определения g нельзя. Эту трудность можно обойти
105

следующим образом. Рассмотрим математический маятник с тем же периодом колебания T, что и у нашего физического маятника
T = 2π |
L |
. |
(14.2) |
|
|||
|
g |
|
|
Длина такого математического маятника L называется приведённой длиной физического маятника.
Сравнивая (14.1) и (14.2), видим, что приведённая длина
L = |
I |
. |
(14.3) |
|
|||
|
md |
|
|
Точка физического маятника, лежащая на расстоянии, равном приведённой длине от оси вращения, называется центром качаний физического маятника (на рис. 14.1 центр качаний – точка О', приведённая длина L = ОО').
Центр качаний обладает интересным свойством: если перенести точку подвеса в центр качаний, то прежняя точка подвеса окажется новым центром качаний. Период колебаний физического маятника при этом окажется прежним. Это свойство называется свойством сопряжённости центра качаний и точки подвеса, и им можно воспользоваться для нахождения приведённой длины.
Для определения ускорения силы тяжести с помощью физического маятника можно, зная его приведённую длину L и период T, найти g по формуле (14.2):
g = |
4π2 L |
. |
(14.4) |
|
T 2 |
||||
|
|
|
Приведённую длину можно найти с помощью уже упоминавшегося выше свойства сопряжённости точки подвеса и центра качаний физического маятника.
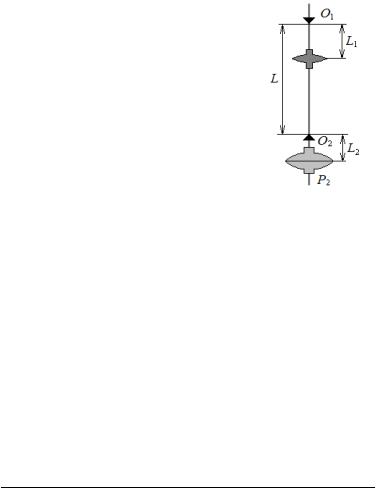
Именно так и предлагается поступить в данной работе. В ней используется особый физический маятник, называемый оборотным. Маятник схематически изображён на рис. 14.2. Он представляет собой жёсткий металлический стержень длиной более метра, на котором укреплены две призмы О1 и О2, каждая из которых может служить осью вращения маятника (точкой его подвеса).
На стержне также укреплены два груза Р1 и Р2 в форме чечевиц, которые могут перемещаться по стержню и закрепляться в любой его точке. На поверхности стержня нанесены деления, позволяющие фиксировать положение грузов.
106
В работе используется свойство сопряжённости (обратимости) центра качаний и точки подвеса. При переносе центра качаний в точку подвеса приведённая длина маятника остаётся прежней. Это мы и используем в нашей работе.
Метод заключается в том, что передвигая один из грузов, при неизменном расстоянии между призмами, и определяя периоды колебаний маятника около осей О1 и О2, можно найти такое положение чечевицы, при котором эти периоды окажутся равными. При таком положении груза установленное расстояние L между призмами О1
и О2 будет приведённой длиной нашего физиче- Рис. 14.2 ского маятника. А ускорение g тогда найдём по
формуле (14.3).
ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ
1. Не сдвигая призм О1 и О2 (см. рис. 14.2), расстояние L между которыми 60 или 90 см, при неизменном положении малой чечевицы Р1 (расстояние от центра этой чечевицы до ребра О1 призмы L1 = = 30 см), закрепите большую чечевицу Р2 на расстоянии L2 = 10 см от ребра призмы О2 и определите время t1 20-ти полных колебаний при таком положении маятника, когда осью вращения является ребро О1 (это положение маятника мы будем называть прямым). Все измерения занесите в табл. 14.1.
|
|
|
Таблица 14.1 |
|
|
|
Время 20-ти колебаний, с |
|
|
№ |
L2, |
|
||
|
см |
t1 (в прямом положении) |
t2 (в обращённом положении) |
|
1 |
|
|
|
|
2 |
|
|
|
|
... |
|
|
|
|
2. Переверните маятник (обращённое положение) и вновь определите время t2 20-ти полных колебаний маятника. Все измерения занесите в табл. 14.1.
107

3.Отодвиньте чечевицу Р2 от призмы О2, закрепив ее на расстоянии L2 = 15 см и вновь измерьте время 20-ти колебаний в прямом, а затем в обращённом положениях маятника. Повторите из-
мерения времени 20-ти колебаний для L2 = 20, 30 см и т.д. Все измерения занесите в табл. 14.1.
4.По данным табл. 1.14 постройте график зависимости времени
от расстояния t1 = f(L2) и t2 = f(L2) и определите точку пересечения кривых, соответствующую t1 = t2 и определённому значению L2, на-
зовём его L2′ .
5. Установите чечевицу Р2 в положение L2′ , найденное из гра-
фика, и определите время 30-ти полных колебаний при прямом (t1) и обращённом (t2) положениях маятника. Все измерения занесите в табл. 14.2.
6. Для получения более точного значения величины L2 небольшим смещением чечевицы Р2 добейтесь такого совпадения значений времени t1 и t2, чтобы разность между ними не превышала 0,5 с. По определённым t1 и t2 найдите соответствующие периоды колебаний T1 и T2 и их погрешности. Все измерения занесите в табл. 14.2.
|
|
|
|
Таблица 14.2 |
|
|
|
|
Период колебаний |
|
|
№ |
Время 30 колебаний, с |
|
|||
t1 |
t2 |
T1 |
T2 |
|
|
|
(прямое положение) |
(обращенное положение) |
|
||
|
|
|
|
||
1 |
|
|
|
|
|
2 |
|
|
|
|
|
... |
|
|
|
|
|
|
7. По среднему значению T = (T1 + T2)/2 и расстоянию L между |
||||
рёбрами призм по формуле (14.4) рассчитайте ускорение силы тяжести g и погрешность g.
Практические указания
1.Для запуска маятника отклоняйте его на угол 5−7 градусов от вертикали.
2.При перевешивании маятника с одной призмы на другую берите его обеими руками так, чтобы не погнуть стержень.
108
3.Обратите внимание на правильность установки рёбер в желобах, не допуская никаких поворотов рёбер или боковых отклонений маятника от вертикальной плоскости при колебаниях.
4.При определении расстояния L2 учтите, что толщина чечевицы Р2 составляет 4 см, а вместе с выступами – 8 см.
КОНТРОЛЬНЫЕ ВОПРОСЫ
1.Что называется приведённой длиной физического маятника?
2.Что называется центром качаний физического маятника? Каким свойством обладает центр качаний? Докажите это свойство.
3.Как будет влиять на продолжительность периода колебаний движение точки подвеса маятника? Например, как будут вести себя часы с маятником на корабле, если корабль раскачивается на волнах?
109

Работа № 15
ИЗУЧЕНИЕ ЗАТУХАЮЩИХ КОЛЕБАНИЙ ФИЗИЧЕСКОГО МАЯТНИКА
Цель работы: исследовать характер затухания колебаний под действием вязкого и сухого трения, определить угол застоя и момент силы сухого трения.
Приборы и принадлежности: физический маятник, ванна с водой, датчик угла поворота, компьютер.
ВВЕДЕНИЕ
Если на колеблющееся тело действуют силы сопротивления, то его колебания будут затухать, так как тело будет расходовать энергию на работу против этих сил. Возможны разные законы сил трения: вязкое и сухое трение.
Вязкое трение. В случае, когда силы сопротивления пропорциональны скорости тела (вязкое трение), зависимость отклонения
его от положения равновесия x(t), как известно, следующая: |
|
x(t) = A(t)cos(ωt+α), |
(15.1) |
причём амплитуда колебаний A(t) изменяется по закону |
|
A(t) =A0 e –βt , |
(15.2) |
а ω – частота затухающих колебаний: |
|
ω= ω2 −β2 , |
(15.3) |
0 |
|
где ω0 – частота колебаний в отсутствие трения, α – начальная фаза, A0 – амплитуда в начальный момент времени, β – коэффициент затухания.
Графики колебаний, затухающих под действием вязкого трения, показан на Рис. 15.1. На графике пунктирной линией изображена зависимость (15.2) амплитуды колебаний A(t) от времени. Время выражено в единицах собственного периода колебаний.
Коэффициент затухания можно определить из (15.2), если известны A0 и A(t):
β = |
1 |
ln |
A0 |
. |
(15.4) |
|
A(t) |
||||
|
t |
|
|
||
110