

Питання на екзамен
.pdfр - фокальний параметр, е – ексцентриситет, а - велика піввісь
b - мала піввісь, r(p) - відстань перегелію, r (a) - відстань апогелію
90) ДИФЕРЕНЦІЙНІ ВИМІРИ ГНСС
Для зменшення впливу систематичних похибок на результати спостережень запропоновано диференційний метод урівноваження ГНСС-мереж. Для часткового вилучення систематичних похибок запропоновано замість рівнянь поправок усіх векторів складати рівняння поправок різниць одночасно виміряних векторів. При цьому утворені рівняння різниць не повинні мати спільних векторів. Для векторів, які не увійшли в рівняння різниць векторів, записують класичні рівняння поправок. Відповідно у диференційному методі можуть бути присутні два типи рівнянь (рівняння поправок векторів і їх різниць).
(До диференціальних знімань відносять : -Статичні виміри -швидка статика -кінематичні виміри
-кінематика у режимі RTK - метод “Stop and go”
Диференційний режим є найбільш ефективним для максимального врахування похибок. Особливість диференціального режиму – це передача диференціальних поправок від базового приймача до роверного. При диференційних вимірах використовуються щонайменше два приймача,які вимірюють псевдовіддалі. Один приймач знаходиться на точці з відомими координатами, його називають базовим. Другий приймач знаходиться на точці, координати якої потрібно визначити.
Такий приймач називають роверним ,а точку роверною (точка знімання). Диференціальні методи за опрацюванням можуть бути реалізовані двома способами – за пост опрацюванням та в режимі реального часу.( RTK)
При постопрацюванні результати вимірювань опрацьовуються після завершення вимірювань, коли дані імпортуються з обох приймачів. Методи в реальному часі –це методи ,коли координати визначаються безпосередньо під час спостережень. При цьому скорочуються затрати і час знімання. Вимагає додаткового обладнання .Роверний та базовий приймачі повинні бути обладнані радіомодемами. Розвязання задачі з визначенням координат відбувається в контролері роверного приймача . Диференційні поправки з базового приймача на роверний передаються засобами зв’язку.На екрані контролера відображаються опрацьовані координати і таким чином в реальному часі отримуємо точні координати.)
91. ПОХИБКА ЗА ВПЛИВ ТРОПОСФЕРИ
Тропосфера – самий низький від земної поверхні шар атмосфери (8- 13км). Вона такох обумовлює затримку поширення сигналу. Величина затримки залежить від метеопараметрів (тиск, температура, вологість), а також від висоти супутника на горизонтом. Компенсація тропосферних затримок вираховується шляхом розрахунку математичної моделі цього шару атмосфери. Тропосферні затримку викликають похибки виміру псевдовіддамей у 1 м.
Тропосферну затримку можна розділити на 2 складові:
1)суху; (гудтостатичну)
2)морку.
Суха частина в напрямку зеніту називається ZDH може бути визначена на основі метеопараметрів. Мокра частина в напрямку зеніту ZWH важко піддається моделюванню у зв’язку з неднорідним розподілом.
Тропосферна затримка радіохвиль визначається як
= ∫( − 1) = 10−6 ∫ ds, n – коеф. заломлення радіохвиль,- коеф. рефракції.
= +
92. ЕФЕМЕРИДИ ГНСС (ТОЧНІСТЬ ЗАСТОСУВАННЯ)
Ефемериди ГНСС Альманах – 200м
Бортові – 2-3м Точні – 3-5см.
Альманах – файл, який передається кожних 15 хв.з супутниковим вигналом. Він містить орбітальні параметри і їх зміни в часі усіх супуників, які на цей момент діють в системі GPS. Альманах використовують для визначенні наближених координат супутників з метою ініціалізації сигналу.Альманах використовують для прогнозування видимості супутників.
Бортова ефемерида передається з сигналом супутника і містить орбітальні параметри цього супутника. Використовується для визначення координат абсолютним методом.
Точні ефемериди передають через і-нет центрами опрацювання супутникових вимірів з запізненням до 2-х тижнів.
93. НИЗЬКО-ОРБІТАЛЬНІ ШСЗ (LEO)
LEO – up to 2000km. Головне їх достоїнство - близькість до Землі, а значить, знижена потужність передавачів, малі розміри антен і невеликий час поширення сигналу (близько 20-25 мс). Крім того, їх легше запускати. Основний недолік - мала площа покриття, діаметр якої становить всього близько 8000 км. Період обороту такого супутника навколо Землі становить 1,5-2 години, а час видимості супутника наземною станцією - всього 20 хвилин. Це означає, що постійний зв'язок за допомогою низькоорбітальних супутників може бути забезпечена, тільки коли на орбіті знаходиться досить велика їх кількість.
Якщо основним призначенням геостаціонарних супутників є широкомовлення і далекий зв'язок, то низькоорбітальні супутники розглядаються як важливий засіб підтримки мобільного зв'язку.
CHAMP – супутник, який використовується для геологічних, геофізичних, геодезичних, океанічних та кліматичних досліджень. Вивчає розміри, структуру геоїда.
Мета: виміри гравітаційного поля Землі, дослідження магнітного поля Землі, моніторинг атмосфери і іоносфери.
Супутник CHAMP прицює в режимі «висока-низька орбіта». Низький супутник CHAMP є відсліктований супутникaмb GPS. Збурення супутника, викликані впливом атмосфери, вилучаються з допомогою
GPS.
Кут нахилу його орбіти – 90град, період обертання 90 хв, висота – 450 км.
94. ПРИНЦИП ДІЇ ГНСС
Основою роботи ГНСС є прецизійний вимір часу. Усі супутники оснащені рубіново – цезієвим атомним годинником, який утворює сигнал стабільної частоти
10.23 MHz *10−1210−13
Разом з сигналом подається супутникове повідомлення. В ньому містяться параметри супутника, його поправку атомного годинника. Сигнал з супутника передається на 2-х частотах L1(10,23MHz*154) і L2(10,23 МНz*120).
На частоту L1 йде модулювання P-code – C/A code (код низької частоти)
+ data message.
L2 - P-code (прецензійний код) + data message
За допомогою P-code і C/A коду вимірюється віддаль до супутника кодовим методом.
Приймач і супутник одночасно генерують P-code і C/A code. Приймач відчитує P-code і C/A code з сигналу супутника. На основі порівняння і визначення зміщення P-code і C/A коду генерованого приймачем і відчитаного з супутника сингалу визначається час проходження сигналу віддалі від супутника до приймача і його множенням на швидкість радіохвилі визначається віддаль до супутника.
95. ВИМІРЮВАННЯ МЕТОДОМ ШВИДКОЇ СТАТИКИ
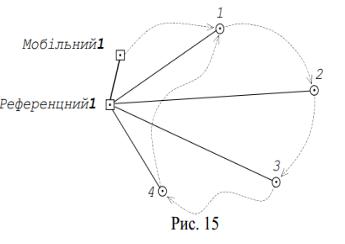
Швидка статика – похідний від статичного метод вимірювань. Вимірюються вектори довжиною до 1 км. Тривалість сесії до 10 хв. При цьому базовий приймач має працювати безперервно протягом всієї сесії вимірювань, а такі приймачі повинні отримувати сигнали однакових супутників. Використовуються 2 референцні станції. Базовий приймач безпосередньо в зніманні місцевості участі не бере, а використовується лише для визначення диференціальних поправок і передачі їх для обчислення координат роверних точок. Метод використовується для побудови мережі 3 класу. Інтервал реєстрації – 1-10с.
96.ГЕОМЕТРИЧНИЙ ФАКТОР ЗНИЖЕННЯ ТОЧНОСТІ (GDOP)
= 80
97.СЕРЕДНЬО ОРБІТАЛЬНІ ШСЗ
МEO – (Medium Earth Orbit)- 5000 – 20000km. До таких ШСЗ відносяться, на приклад, GPS, GLONASS (20000km), GALILEO (24000km).
GPS. Положення об'єкта обчислюється завдяки використанню розміщеного на ньому GPS-приймача, який приймає та обробляє сигнали супутників космічного сегменту GPS-системи глобального позиціонування. Для визначення точних параметрів орбіт супутників та керування GPS-системою вона в своєму складі має наземні центри управління.
GLONASS Основою системи є 24 супутника, що обертаються над поверхнею Землі в трьох орбітальних площинах. Координати визначаються за принципом, узятим за аналогією
американської |
системи |
глобального |
позиціонування GPS. |
Як |
||
альтернатива обом системам у Європірозробляється система Галілео. |
|
|||||
GALILEO Повністю розгорнута |
система |
Galileo |
буде складатися |
|||
з 24 діючих супутників плюс |
шість |
на |
орбіті |
запасних частин, |
||
розташованих в трьох кругових середньо навколоземних орбітах (СОО)
літаків на 222-кілометровій висоті над поверхнею Землі, і при нахилі орбітальних площин 56 градусів по відношенню до екватора. Початкові послуги будуть доступні до кінця2016 р крім того, нові послуги будуть випробувані і доступні, із завершенням системи,це заплановано на 2020 рік. Як тільки це буде досягнуто, навігаційні сигнали Galileo забезпечать хороше охоплення навіть в широтах до 75 градуса північної широти.
98. ДЖЕРЕЛА ПОМИЛОК GPS – ВИМІРІВ
Точність GPS-вимірюваиь обумовлена цілим рядом джерел похибок як випадкового, так і систематичного походження.
Ці джерела похибок можна поділити на три групи, пов'язані із:
-сузір'ям супутників;
-зовнішніми умовами;
-GPS-приймачем.
1.До похибок, обумовлених сузір’ям супутників, відносяться:
1.1 Випадкова похибка, обумовлена геометрією сузір'я супутників.
На визначення координат місцеположення приймача суттєвий вплив має конфігурація сузір'я супутників, від яких одночасно приймаються сигнали, та їх кількість.
Для оцінки конфігурації сузір'я супутників введено спеціальні критерії, які визначаються коефіцієнтами погіршення точності DОР: GDOP (просторово-часовий параметр); PDOP (просторове положення); HDOP (планове положення); VDOP(висотне положення); TDOP(одномірний часовий параметр).
1.2Систематична похибка визначення часу атомним годинникам GPS-
супутника. Похибка атомного годинника супутника визначається станціями контрольного сегменту і передається на бортовий комп'ютер супутника.
1.3Систематична похибка визначення ефемерид і координат супутника.
Похибка ефемерид та координат супутника також визначається контрольним сегментом і передається на супутник. Точність переданих у реальному часі координат супутника в складі супутникового сигналу складає ± 2 м, а за остаточними ефемеридами IGS складає ± 5 см.
2.Похибки, обумовлені зовнішніми умовами
2.1 Випадкова похибка, обумовлена впливом іоносфери.
Іоносфера - це іонізований атмосферний шар в діапазоні висот 50-1000 км. що містить іони та вільні електрони. Наявність цих електронів викликає зменшення кодової швидкості сигналу та випередження фазової швидкості. В результаті неспівпадання швидкостей виникають групова затримка та фазове випередження. Тому виміряні кодові псевдовідстані довші, а фазові коротші, ніж геометрична відстань між супутником та приймачем. Величина такої похибки може коливатись в межах 0.15-50 м.
2.2 Випадкова похибка, обумовлена впливом тропосфери.
Тропосфера - нижній від земної поверхні шар атмосфери (приблизно до 12 км). Тропосфера також обумовлює затримку поширення радіосигналу від супутника. Компенсація тропосферних затримок забезпечується шляхом розрахунку математичної моделі цього шару атмосфери. Необхідні для цього коефіцієнти отримуються в навігаційному повідомленні супутника.
2.3Випадкова похибка, обумовлена бигатошляховістю поширення сигналу.
Багатошляховість поширення сигналу з’являється в результаті відбивання сигналу супутника від відбиваючих поверхонь (стіни будинків, огорожі, водні поверхні), розташованих безпосередньо біля приймача. Приймач може отримати сигнал від супутника як напряму, так і відбитий від перешкоди. Відбитий сигнал проходить більшу відстань.
2.4Систематичні похибки, обумовлені релятивістськими ефектами.
Вплив релятивістських ефектів має систематичний характер, тобто, за суттю вони є поправками.
3.Похибки, обумовлені GPS-приймачем
3.1Інструментальна похибка приймача обумовлена наявністю шумів в електронному тракті приймача. Відношення сигнал/шум приймача визначає точність процедури порівняння опорного і прийнятого від ШСЗ сигналів, тобто, похибку обчислення псевдовіддалі. Наявність даної помилки може приводити у абсолютному методі до виникнення координатної похибки у межах до 1-2 м.
3.2Зсув та варіації фазового центру антени GPS приймача приводять до похибок визначення псевдовіддалей у межах 1 см. Фазовий центр антени - це точка, від якої відраховується псевдовіддаль до центра антени супутника. Розрізняють зміщення фазового центру (ексцентриситет) та його варіації відносно осі обертання антени та відлікової точки.
3.3 Похибка, пов'ялиш з центруванням антени. Вона виникає внаслідок неточного встановлення центра антени приймача над точкою. Ця похибка цілком залежить від спостерігача та його роботи з обладнанням.
99. КІНЕМАТИЧНІ ВИМІРИ ГНСС
Кінематичний метод (Kinematic) застосовується для визначення траєкторій рухомих об’єктів. Для виконання вимірювань цим методом також використовуються мінімум два приймачі - базовий та роверний. Базовий приймач проводить вимірювання безперервно на одній точці, а рухомий приймач знаходиться на транспортному засобі, платформі, або ручній штанзі. При цьому визначаються не координати точки, а вектори руху приймача.
Метод застосовується при визначенні траєкторій рухомих об’єктів; зніманні ліній доріг; меж, гідрографічному зніманні, тощо. Перевага методу полягає у швидкості та економічності безперервних вимірювань. Проте приймачі повинні безперервно отримувати сигнали супутників, а точність вимірювань є на порядок меншою від статичних методів.
Робота роверного приймача ділиться на 2 етапи:
1.Етап ініціалізації, який необхідний для того, щоб розв’язати початкові невизначеності;
2.Мобільний етап, в рамках якого і виконуються спостереження. Ініціалізація та наступна за нею мобільна частина називаються ланками режиму «Кінематика». Ініціалізація може виконуватись
в режимі «Швидка статика», або встановленням приймача на точці з відомими координатами.
100) РОЛЬ ПЕРМАНЕНТНИХ СТАНЦІЙ В ГЕОДЕЗІЇ = 88
101) МЕТОД “STOP AND GO”
Метод «Стій-іди» (Stop & Go ) є похідним від кінематичного методу. Як і при кінематичному методі, базовий приймач постійно знаходиться на одній точці, а роверний зупиняється на кожній точці знімання на декілька хвилин (1-5 хв.) і рухається до наступної, не втрачаючи сигналів супутників. Саме тому цей метод найшвидшим для детального знімання місцевості.
На відміну від кінематичного методу, в режимі «Стій-іди» вимірюються не траєкторія руху, а точки місцевості.
Основні вимоги методу Stop & Go:
1.вирішення неоднозначності до початку виконання вимірювань (ініціалізація);
2.підтримання постійного захоплення не менше 4-х супутників під час руху;
3.інтервал запису - 5-10 сек;
4.при втраті захоплення супутників необхідно повернутися на
попередню |
певну точку |
і повторити вимірювання |
або заново |
|||
виконати |
процедуру ініціалізації. |
|
|
|
||
У Stop & Go |
для зв'язку вимірювань під час руху |
мобільного |
||||
приймача |
до |
початку |
вимірів |
повинна |
бути |
вирішена |
неоднозначність, тобто виконана ініціалізація приймача. |
|
|||||
Метод застосовується при детальному зніманні місцевості. інженерних зніманнях, зніманні доріг, шляхопроводів, меж. зніманні точок, які знаходяться близько одна від одної.
Перевагами методу є те, що він швидкий та економічний. Недоліки: при зніманні даним методом горизонт повинен бути завжди відкритим; сигнал супутника не повинен втрачатися при переході між знімальними точками, точність вимірювань менша, ніж при швидкому статичному методі. Цей метод складно застосовувати на забудованих територіях та у лісах.
При переміщенні з пункту на пункт необхідно підтримувати постійне захоплення супутників. При втраті захоплення супутників необхідно повернутися на попередню певну точку і повторити вимірювання, або заново виконати процедуру ініціалізації.
Після закінчення вимірів рекомендується виконати замикання на перший пункт. Це дозволить у разі необхідності виконати обробку вимірювань з кінця спостережень.
102) ОРБІТАЛЬНІ ПАРАМЕТРИ ШСЗ
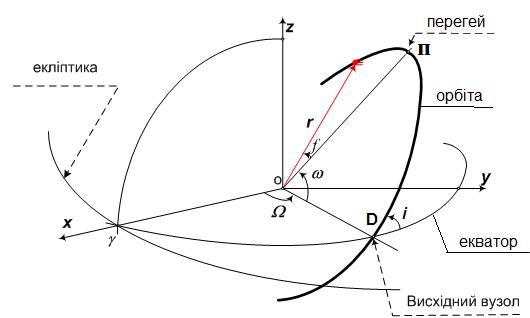
XYZ – ІНЕРЦІАЛЬНА СИСТЕМА КООРДИНАТ
D – Висхідний вузол, точка перетину площини орбіти і площини екватора.
1. Довгота висхідного вузла ( ) – кут в площині екватора між напрямком на точку весни і напрямком на висхідний вузол. Довгота висхідного вузла відлічується проти год. стрілки і є в межах 0 -360 .
2.Кут нахилу орбіти (і) – двогранний кут між пл. екватора і пл. орбіти; відлічується проти год. стрілки і є в межах 0 -180 .
3.Аргумент перегею ( ) – кут в пл. орбіти між напрямком на висхідний вузол і напрямком та точку перегею; відлічується проти год. стрілки і є в
межах 0 -360 .
4. Істинна аномалія (f або ) – кут в пл. орбіти між напрямком на точку перегею і напрямком на супутник; відлічується проти год. стрілки і є в межах 0 -360
5.Велика піввісь (а).
6.Ексцентриситет орбіти (е).
Перші три параметри задають орієнтацію орбіти в просторі відносно осей координат; 4 – місцеположення супутника; 5 – розмір орбіти; 6 – форма орбіти.
103) КОНТРОЛЬНИЙ СЕГМЕНТ ГНСС = 60