

Питання на екзамен
.pdf9.Динамічний метод космічної геодезії
Найбільш загальним методом для вирішення задач супутникової геодезії є динамічний, який грунтується на вивченні еволюції орбіти ШСЗ в часі. Тобто, необхідно знати модель руху супутника. Динамічний метод на відміну від геометричного визначає також орбіту супутника, тобто полягає у сумісному визначенні гравітаційного поля Землі, елементів орбіти ШСЗ та координат пунктів за сукупністю вимірів
виконаних на пунктах спостережень.
Геометричний радіус – вектор супутника:
r = r(Ei,ψk,t).
Ei,ψk,t – параметри елементів орбіти супутників, гравітаційного поля
та часу.
Перевагою динамічного методу є те, що координати супутників визначаються у геоцентричній системі координат, недоліком – необхідність застосування громіздкого математичного апарату для обчислення ефемерид ШСЗ.
10) Зоряний час.
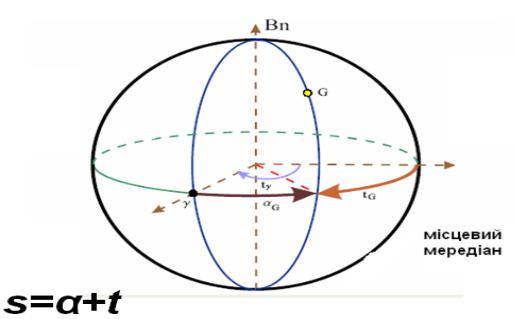
α –
пряме
сходження
t – годинний кут
Зоряний час відлічується відносно точки весняного рівнодення або зірок.
Зоряний час - це годинний кут точки весняного рівнодення ϒ Зоряна доба - це проміжок часу між двома верхніми кульмінаціями точки весняного рівнодення в площині місцевого меридіану.
Час від моменту кульмінації (верхньої) точки весняного рівнодення до її
положення в певний момент називається |
зоряним, виражається |
у |
|
частках зоряної доби |
|
|
|
12) Системи координат які застосовуються в космічній геодезії. |
|
||
Геоцентрична система координат WGS – 84 : |
|
|
|
- |
Визначена за допомогою спостережень супутників системи |
||
TRANSIT; |
|
|
|
- |
Точність визначення координат пунктів у межах 2 м; |
|
|
- |
З часом система модернізовувалась і її |
остання версія (WGS – |
|
84(G873)) за точністю визначення координат у межах 2 м . |
|
||
- |
Початок системи координат співпадає з центром мас Землі . Вісь |
Z |
|
спрямована до умовного земного полюса. |
|
|
|
- |
Велика піввісь а = 6378 137 м 1/f =298,257223563 |
|
|
Геодезична референсна система GRS 80: |
|
|
|
-Прийнята 1979 р. на XVII Генеральній Асамблеї Міжнародного геодезичного і геофізичного союзу в Канберрі;
-Заснована на теорії еквіпотенціального еліпсоїда ;
-Рекомендують використовувати як офіційну систему референтну для геодезичних робіт
- |
Велика піввісь а = 6378 137 м 1/f =298,257222101 |
Система координат 1942 року :
-референцна система прямокутних координат на площині, яка базується на використанні конформної проекції Гаусса-Крюгера з вихідними даними:
-референц-еліпсоїд Красовського — велика піввісь 6 378 245 м, стиснення 1:298,3;
-висота геоїда в Пулково над референц-еліпсоїдом дорівнює нулю;
-Скп переходу із системи 42 р до ITRF = 4 -5 м , що не відповідає сучасним виробничим вимогам
Система координат УСК-2000 :
-Введена в 2007 році;
-В основі є еліпсоїд Красовського - велика піввісь 6 378 245 м, стиснення 1:298,3;
-Визначена на рівні точності світових систем координат;
-Параметри системи координат УСК-2000. Положення пунктів у
системі координат визначаються: Просторовими прямокутними координатами X, Y, Z (вісь Z збігається з віссю обертання еліпсоїда, вісь Х лежить у площині нульового меридіана, а вісь Y доповнює систему до правої);початок системи координат є геометричний центр еліпсоїда; Геодезичними (еліпсоїдальної) координатами: широтою - В, довготою - L, висотою - Н;Плоскими прямокутними координатами x і y, які обчислюються в проекції Гаусса-Крюгера.
- Центр референцної системи координат сполучений із центром референц-еліпсоїда, що забезпечує оптимальне відхилення його поверхні від реальної поверхні Землі на регіон України і мінімізує поправки на висоти квазігеоіда й ухилення прямовисних ліній.
13) Лазерна локація ШСЗ і Місяця.
Лазерна локація супутників (англ. Satellite |
laser ranging) - це метод |
|||
визначення |
топоцентричної |
відстані |
до супутника, |
за |
допомогою лазерних імпульсів, за принципом станція - супутник – станція. Лазерна локація є одним з найважливіших методів досліджень в геодезії та геофізиці, астрономії та геодинаміці.
Спостереженя в лазерній локації полягають у вимірюванні відрізку часу, за який, надкороткий лазерний імпульс проходить від земної станції до супутника і повертається знову на станцію. Тобто, коли лазер випускає сигнал на відбивач, що знаходиться на супутнику, строго фіксується час виходу сигналу з телескопа, лазерний пучок, що потрапляє на відбивачі розташовані на супутнику, відбивається і повертається у телескоп з точною фіксацією часу його повернення. При багатократному повторенні лазерних імпульсів виникає послідовність надісланих і прийнятих сигналів. Ці сигнали передаються на комп’ютерний лічильник подій, який в свою чергу визначає час поширення лазерного імпульсу , що називається локаційним запізненням, і проводить контроль та реєстрацію щодо інформації результатів вимірювань. Локаційне запізнення помножене на швидкість світла і є миттєвою відстанню до супутника. Лазерна локація супутників з точністю до міліметрів може бути здійснена лише для супутників обладнаних кутовими відбивачами. При цьому чим більша висота орбіти , тим більше відбивачів повинно бути на супутнику.
21 липня 1969 астронавти програми Аполлон-11 встановили на Місяці перший кутовий відбивач. Пізніше подібні ж відбивачі були встановлені астронавтами програм Аполлон-14 і Аполлон-15 (відбивач Аполлона-15 є найбільш великим, являє собою панель з трьохсот призм). Радянські місяцеходи Луноход-1, доставлений на Місяць в рамках місії Луна-17, і Луноход-2, доставлений в ході місії Луна-21, також були оснащені кутиковими відбивачами.
Відбивач Місяцеходу-1 в перші півтора роки роботи забезпечив близько 20 спостережень, але потім його точне положення було втрачено, знайти його поки не вдалося. З іншими 4 відбивачами проблем не виникло, їх постійне зондування ведеться в даний момент поруч станцій, у тому числі Лабораторією реактивного руху НАСА, яка вела спостереження з лазерної локації відбивачів з самого моменту їх встановлення.
Лазер випромінює сигнал в телескоп, спрямований на відбивач, при цьому точно фіксується час, коли сигнал був випромінюючи. Частина
фотонів від початкового сигналу повертається назад на детектор з метою зафіксувати початкову точку даних. Площа пучка від сигналу на поверхні Місяця складає 25 км². Відбитий від приладу на Місяці світ протягом приблизно однієї секунди повертається в телескоп, далі проходить через систему фільтрації для отримання фотонів на потрібній довжині хвилі і для відсіву шумів. Точність вимірювання часу в сьогоденні - порядку 30 пікосекунд (що й відповідає приблизно двом сантиметрам точності вимірювання відстані).
15) Геометричний метод космічної геодезії.
Геометричний метод грунтується на синхронному фотографування ШСЗ на фоні зоряного неба мінімум з двох пунктів поверхні Землі. Такі спосереження дають можливість визгначити напрям вектора, який з’єднує ці пункти. Множина таких векторів утворює векторну просторову систему, яка називається космічною тріангуляцією. Таким методом можна будувати мережі зі сторонами порядку 1,5-2000 км, а також зв’язати материки та острова в єдиній системі координат.
Перевагою геометричного методу є те, що він виключає знання теорії руху супутника, а також фактори, які складно врахувати(коливання орбіти, аномалія гравітації, опір атмосфери) Недоліки геометричного методу:
-При цьому методі визначаються лише відносні положення нових пунктів в системі вихідних координат.
-Неможливо прив’язати мережу космічної тріангуляції до центру мас Землі.
В основі методу лежить фундаментальне рівняння супутникової геодезії. По суті воно пов’язує три вектори r,r’,R.
xyz –природна система координат, XYZ – референтна система координат, яка відтворюється мережею супутникових станцій, P-пункт на земній поверхні, S-штучний супутник землі, r-геоцентричний радіусвектор супутника, R- з’єднує початок двох систем координат, R-радіус- вектор координат пункту у референсній системі координат, rʹтопоцентричний радіус вектор супутника.

r = r’+R+ R – фундаментальне рівняння |
Р1 і Р2 – пункти |
спостереження |
|
R = r- r’ – ΔR |
|
16) Геодезична система координат.
Початок
системи координат не співпадає з центром мас Землі.
Вісь X знаходиться на перетині площини екватора та Гринвіцького
меридіану
Вісь Y знаходиться в площині екватора перпендикулярно до осі X
Вісь Z перпендикулярна до земного екватора , спрямована до Пн. Полюса Землі.
Прямокутні координати : X,Y,Z
Еліпсоїдальні координати :B ,L,H
B (геодезична широта) – кут між нормаллю до поверхні референцеліпсоїда , яка проходить через заданий пункт і її проекцією на площину екватора (від 0 до 90 )
L (геодезична довгота) – двогранний кут між площинами Гринвіцького меридіана і геодезичного меридіана даного пункту. від 0° (на початковому, Гринвіцькому меридіані) до 180° на схід і на захід від нульового меридіана.
H ( геодезична висота) – відстань по нормалі між заданим пунктом і поверхнею референц-еліпсоїда.
три геодезичні координати точки
(B, L, H) однозначно не описують її просторове розташування, оскільки поверхнею віднесення геодезичних координат є еліпсоїд, геометрію якого
визначають його параметри (велика піввісь і мала піввісь). Точки, які мають
однакові за значенням геодезичні координати (B, L, H), але відносяться до
різних еліпсоїдів будуть мати різне просторове розташування. Тому оперуючи
17) Орбітальний метод космічної геодезії.
Це метод похідний від динамічного. Він полягає у сумісному визначенні координат пунктів та елементів орбіти ШСЗ за сукупністю вимірів, виконаних на цих пунктах спостережень, при цьому параметри гравітаційного поля вважаються завчасно відомими і незмінними.
Орбіта супутника визначається в геоцентричній системі координат і координати пункту визначаються в тій же системі. Проте, для цього методу потрібний складний математичний апарат.
Рівняння поправок :
′ |
+ − |
′ |
+ (′ − ′ |
) = |
|
|
|||
|
|
|
вим |
|
|
|
|
|
|
18) Географічна. Геодезична та астрономічна широта пункту.

Географічна широта – це кут в площині мередіана між геоцентричним напрямком на кут і його проекцією на площину екватора.
Геодезична широта - кут між нормаллю до поверхні референцеліпсоїда , яка проходить через заданий пункт і її проекцією на площину екватора.

Астрономічна широта – кут в площині астрономічного меридіану між прямовисною лінією , яка проходить через даний пункт і проекцією на площину екватора .
Розбіжність між φ3 і φ2 досягають 10 -12 с. (відхилення прямовисної лінії)
21) Методи космічної геодезії (негативні та позитивні сторони)
Геометричний позитивне :немає необхідності визначати координати супутника а негативне що координати пунктів визначаються виключно у референцній системі координат.
Динамічний позитивне:координати пунктів і супутників визначають у геоцентричній системі координат негативним є математичний аналіз обчислення ефемерид штучного супутника Землі.
22) Горизонтна система координат
Початком є пункт спостереження її називають топоцентричною системою координат . Основна лінія – прямовисна лінія ,утворена 2 точками (зеніту і надиру).Великим колом
на небесній сфері є переріз площини яка проходить через початок системи координат .Всі решта площини при перерізі з небесною сферою утворюють
малі кола.
Велике коло яке проходить через точку надиру і зеніту , Північний і Південний полюс називають астрономічним меридіаном . Велике коло яке проходить через точки зеніту і надиру площина якого є перпендикулярна до площини астрономічного меридіана називають першим вертикалом
Горизонта́льна систе́ма координа́т - одна з систем небесних координат.
У цій системі основною площиною є площина математичного горизонту. Однією координатою при цьому є або висота світила над
горизонтом h , або |
його зенітна |
відстань z. Іншою координатою |
|
є азимут A. |
|
|
|
Висотою h світила |
називається |
дуга вертикального |
кола від |
математичного горизонту до світила, або кут між площиною математичного горизонту і напрямком на світило.Висоти відраховуються в межах від 0° до +90° до зеніту і від 0° до −90° до надиру.Зенітною відстанню z світила називається дуга вертикального кола від зеніту до світила, або кут міжпрямовисною лінією і напрямком на світило.
Зенітні відстані відраховуються в межах від 0° до 180° від зеніту до надиру.Азимутом A світила називається дуга математичного горизонту від точки півдня до вертикального кола світила, або кут між полудневою лінією та лінією перетину площини математичного горизонту з площиною вертикального кола світила.
Азимути відраховують у бік добового обертання небесної сфери, тобто на захід від точки півдня, в межах від 0° до 360°. Іноді азимути відраховують від 0° до +180° на захід та від 0° до −180° на схід. (У геодезії азимути відраховують від точки півночі.)
23) Динамічний метод космічної геодезії
Динамічний метод – полягає у сумісному визначенні параметрів гравітаційного поля Землі ю, елементів орбіти, ШСЗ та координат пунктів за сукупністю вимірів виконаних на пунктах спостереження:
Геоцентричний радіус вектора супутника:- r=r(Ei,Ψk,t) Ei,Ψk,t-параметри елементів орбіти супутника гравітаційного поля та
часу |
|
Р-ня поправок динамічного методу:- |
r=r(Ei,Ψk,t)-R |
24) Геоцентрична система координат WGS-84.
Система координат WGS-84 першочергово була визначена тільки за допомогою спостережень супутникової системи TRANSIT. Точність визначення координат пунктів була у межах 2м з часом система WGS-84 уточнювалась її остання версія WGS-84(6873) за точністю визначення координат пунктів є у межах 2 см . Початок системи координат WGS-84 співпадає із центром масс Землі , вісь z- спрямована до умовного земного полюса, відрізняється від еліпсоїда GRS80 на міліметровому рівні.