

Питання на екзамен
.pdf80) ГЕОМЕТРИЧНИЙ ФАКТОР ЗНИЖЕННЯ ТОЧНОСТІ (GDOP).
Найуніверсальнішим показником є параметр GDOP - геометричний фактор зниження точності, який характеризує одночасно як точність тривимірного позиціювання, так і часу. Він виражається формулою:
де mх, my , mh - середні квадратичні похибки визначення по осях координат; mt - середня квадратична похибка визначення часу; с - швидкість ЕМХ. Отже, GDOP даєзмогу оцінити геометрію
супутникового "сузір'я". Маленьке |
значення GDOP (< |
6) |
свідчить про |
||||
добру |
геометрію. |
Високе значення GDOP означає, |
що |
супутникове |
|||
"сузір'я" погане. Чим менше GDOP, тим більша ймовірність отримати |
|||||||
добрі |
результати. |
Значення GDOP, |
менше за шість, |
вважається |
|||
допустимим, |
а |
більше |
за |
шість |
- |
завеликим. |
|
Коефіцієнти GDOP відображають лише миттєву геометрію для окремої точки. Ці коефіцієнти обчислюють самі приймачі. Вони ж автоматично
вибирають |
оптимальну |
конфігурацію |
супутників. |
Одночасно |
|||
з GDOP використовують |
також PDOP |
-фактор, що враховує тільки |
|||||
фактор |
тривимірного |
позиціювання, |
без похибок визначення часу, |
||||
і HDOP |
- аналогічний |
фактор, але |
тільки |
для зниження точності |
|||
розташування у горизонтальній площині; VDOP- у вертикальній.
Для переважної більшості пунктів умови щодо GDOP виконуються, якщо в полі зору доступні п'ять або більше супутників. Найкраще "вікно" спостережень для "статики" повинно містити чотири і більше супутників з GDOP < 6 під час кута відсікання, що дорівнює 15° (вертикальний кут між горизонтом і напрямком на супутник).
Другим чинником, що може викликати значне зниження точності, є іоносферне збурення. Іоносферне збурення змінюється в часі і залежить від положення пункту на земній поверхні. У нічний період доби іоносферні збурення значно менші, ніж у світлий період доби. Тому в

нічний період можна зменшити час спостережень наполовину або вдвічі збільшити довжину вектора.
Під час вимірювання, яке вимагає найвищої точності, використовують двочастотні приймачі SR-9500 (фірми Leica); SNR-8000 або SNR-8100
(фірми Alen Osborne); Z-XII (фірми Ashtech); 4000 SSI (фірми Trimble).
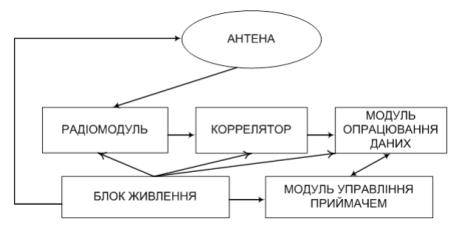
81) БЛОК СХЕМА GPS ПРИЙМАЧА.
По конспекту
Антена – приймає і передає
сигнали. Радіомодуль
– перетворює сигнал.
Корелятор – визначає час і
фазу останньої хвилі.
Корелятор – це пристрі й який визначає затримку сигналу.
Модуль опрацювання даних – виконує алгоритмічним шляхом опрацювання прийнятих сигналів, а також оцінює параметри супутникового сигналу, розраховує місцеположення приймача.
Через модуль управління приймачем оператор задає відповідні режими роботи приймача, контролює процес вимірів.
З нету
У вимірювальному блоці іде розподілення фазомодульованих коливань, що приймаються на кодові і чисто гармонічні сигнали від яких відділяються також сигнали, що входять у склад переданого із супутника навігаційного повідомлення. При цьому перші два види сигналів беруться в блоці процесорів для обчислення віддалей до супутників і грубе визначення координат. В багатоканальному GPS приймачі застосовується структурна селекція розділення сигналів, їх подальше відслідковування і вимірювання відповідних властивих таким сигналам параметрів на основі роботи автоматичної підстройки часу (АВП),автоматичної підстройки частоти (АПЧ) і автоматичної підстройки фази (ФАПЧ), а також на основі використання характерних для кожного супутника і для кожної сучасної частотивідповідних кадрових сигналів (для частоти L1 – С/А коду, а для
частоти L2 – P коду). Контрольний канал слідкування введений в схему з метою здійснення контролю за постійністю часових затримок сигналів у різних каналах. Управління всіма режимами роботи каналів і первинна
обробка результатів спостережень проводиться за допомогою показаного на схемі процесора. При здійсненні структурної селекції у прийомній апаратурі користувача повинна бути можливість формування сигналу відгука, структура якого точно співпадає зі структурою сигналу від супутника, який нас цікавить. Поряд із кодовим поділом при фазових вимірах виникає необхідність використання гармонічних несучих коливань зі супутника, які очищаються від моделюючих кодових сигналів і від навігаційного повідомлення
82) СИСТЕМИ ВІДЛІКУ ВИКОРИСТОВУВАНІ ГНСС
1) Міжнародна загальноземна система відліку ITRS
-початок системи відліку відноситься до центру мас всієї Землі, включаючи океани і атмосферу
-одиниці вимірювання довжини – метр
-за відлікову поверхню прийнятий загальземного еліпсоїд GRS80
2. Геоцентрична система відліку координат "Параметри Землі 1990 р * За відлікову поверхню в геоцентричної системі відліку координат ПЗ-90 прийнятий загальноземний еліпсоїд
3. Світова геодезична система WGS-84
WGS-84, введена в дію в 1984 році, є системою відліку, прийнятої для
Global Positioning System (GPS).
83) ОПРАЦЮВАННЯ РЕЗУЛЬТАТІВ ВИМІРІВ ГНСС
Послідовність операцій: -трансфер даних до ПК -перевірка якості даних -підготовка точних ефемерид --обчислення векторів
-оцінка точності обчислених векторів -урівноваження мережі
-обчислення координат пунктів у системі WGS-84 - оцінка точності визначення координат
-обчислення параметрів трансформації між WGS-84 і системою координат (x,y,h),
у якій повинні бути представленні остаточні результати -оцінка точності параметрів трансформації Трансформація координат з WGS-84 до (x,y,h)
84) ІОНОСФЕРНА ЗАТРИМКА СУПУТНИКОВОГО СИГНАЛУ
GPS
Іоносфера – це іонізований атмосферний шар у діапазоні висот 50 – 500 км, що містить вільні електрони. Наявність цих електронів викликає затримку поширення сигналу супутника, що прямо пропорційна концентрації електронів і обернено пропорційна квадратові частоти радіосигналу. Похибка визначення псевдовіддалі рівна близько 10м.
Параметр,який описує стан іоносфери назTEC. TEC позначається літерою Е і вимірюється в одиницях TECU. Один TECU відповідає 1016 електронів ,які знаходяться в циліндрі з площею основи 1 м2 , та розміщеном вздовж кривої поширення радіохвилі ТЕС в заданому напрямку =
∫ ( )
Ne (ρ) – густина електронів
Часткова компенсація цієї похибки використовує корекцію впливу іоносфери,яка аналітично розраховується за інформацією,що передається
унавігаційному повідомленні.
При цьому величина залишкової іоносферної затримки може викликати
похибку визначення віддалі псевдо дальності близько 10 м.
Для компенсації цієї похибки у визначенні віддалі між супутником і приймачем використовують двох частотні виміри на частотах L1 і L2
85) ОСНОВНА ІДЕЯ ГНСС

GPS гарантує видимість 4 супутників одночасно на відкритій території (приймач може поміряти 4 віддалі).
На основі орбітальних параметрів супутника,до яких вимірюється віддаль і які передають бортові ефемериди ,приймач визначає координати цих супутників в інерціальній системі координат та перетворює в земну систему WGS-84.
На основі виміряних та координат супутників прямою просторовою засічкою визначають координати приймача.
4-та віддаль для визначення поправки кварцового годинника
3-тя – для визначення X,Y,Z приймача
86) МЕТОДИ ГЕОДЕЗИЧНИХ ВИМІРЮВАНЬ ГНСС
87) ТРАНСФОРМАЦІЯ КООРДИНАТ
-на площині (X,Y)
-просторова (X,Y,Z)
3D:
Х Y Z-координати в локальній системі

Xo Yo Zo-координати початку локальної системикоорд. В системі WGS84
Rx Ry Rzкути між відповідними осями координат системи WGS-84 і локальної( кутовий коефіц. трансформації)
x,y,z - координати в системі WGS-84 k- маштабний множник
2D:
сosQ. sinQ-кут повороту.
88) РОЛЬ ПЕРМАНЕНТНИХ СТАНЦІЙ В ГЕОДЕЗІЇ
Перманентна супутникова станція станція, обладнана комплектом відповідного обладнання, що цілодобово веде спостереження супутників. Використання даних з перманентних станцій дозволяє збільшити точність проведених раніше супутникових спостережень, а перманентна станція, яка знаходиться достатньо близько до місця СР5-спостережень, може використовуватись як опорна (базова) точка при відносних методах визначення координат.
Перманентна GPS-станція має бути обладнана: GPS-прнймачем, GPSантеною, блоком безперервного живлення, персональним комп’ютером, що підключений до Інтернету в режимі оn-lіnе, метеорологічними інструментами.
Станція має задовольняти стандартним вимогам до геодезичних пунктів першого класу по стабільності, стійкості, довготермінової підтримки,
доступності тощо. Перешкоди видимості супутників з кутами більше 15° мають бути мінімальними. Місце розташування антени не повинне мати поруч джерел радіовипромінювання. Антена повинна мати громовідвід.
Перманентні станції, що обслуговуються окремою організацією або дані з яких надходять в єдиний центр обробки даних супутникових спостережень, утворюють мережу перманентних станцій.
Так, наприклад, міжнародна GPS служба IGS була заснована як наукова організація для уніфікації міжнародних стандартів баз даних GPS вимірювань і їх аналізу та опрацювання має глобальну мережу перманентних GPS -станцій. Особливо щільною ця мережа є на території Європи.
Першочергова мета IGS полягає в тому, щоб зробити результати спостережень зі своїх станцій загальнодоступними для всіх користувачів, які використовують їх для високоточних геодезичних та геофізичних робіт. На веб-сторінці Центрального Бюро IGS розміщены у заархівованому виді бази даних результатів вимірів систем GPS і GLONASS:
результати спостережень на всіх перманентних станціях;
ефемериди GPS і GLONASS супутників;
параметри обертання Землі і руху полюса;
координати та швидкості руху перманентних станцій;
інформацію про поправки атомних годинників супутників і перманентних станцій;
оцінку зенітної тропосферної затримки;
глобальні іоносферні карти.
В Україні також існує ряд проектів, що розвиваються різними організаціями і мають на меті забезпечення користувачів даними супутникових спостережень як в режимі реального часу, так і в режимі постопрацювання.
Першим науково-технічним проектом в Україні, направленим на побудову локальної мережі активних референцних станцій, стала розробка науковців Головної астрономічної обсерваторії з реалізації регіональної системи геодинамічного та екологічного моніторингу Криму ще у 2002 р. Нажаль, він мав лише теоретичне значення.
Перші практичні результати у цьому напрямі були отримані науковцями акціонерного товариства «АТ Науково-дослідний інститут радіотехнічних вимірювань» у рамках проектування системи
координатно-часового і навігаційного забезпечення України. Ними, на основі розроблених контрольно-коректувальних станцій, були проведені експериментальні роботи з формування та передачі користувачам шнрокозонної диференційної коректувальної інформації у режимі реального часу.
Основною метою цих робіт було забезпечення, при створенні мережі зазначених станцій на всій території України, точності координатних визначень у межах 1-3 м. У подальших планах було досягнення і геодезичної точності як для післясеансного опрацювання даних супутникових спостережень, так і для режиму реального часу RТK.
Ще одним проектом у галузі побудови локальної мережі активних референцних станцій е Регіональна система високоточних супутникових геодезичних вимірювань (м. Харків). Ця система має виражену практичну направленість і є поки що лише сукупністю постійно діючих базових GPS-станцій, розташованих на території Харківської та Київської областей, але не мережею у її теперішньому розумінні.
Закарпатська служба визначення положення - ZAKPOS розпочиналася у вигляді проекту встановлення однорідної базової інфраструктури днференцінного GNSS - на території Закарпатської області, але в подальшому зусиллями зацікавлених організацій об’єднала в собі ряд інших перманентних станцій Західної України.
За своєю суттю це регіональна GNSS система наземного базування, що повністю створювалася за європейськими стандартами EUPOS і направлена на забезпечення GNSS даними спостережень та поправками до них в реальному часі (RТK) для високоточного визначення місцеположення.
На кінець 2009 р. мережа референцннх станцій ZAKPOS повністю ввійшла у робочий режим (7 днів/24 год.) із всіма можливими сервісами.
89) ТИПИ ОРБІТ ШСЗ
Типи орбіт шсз:
по висоті:
-низькоорбітальні (LEOLow Earth Orbit), до 2000 км
-середньоорбітальні (MEO-Medium Earth Orbit),5000-20000 км:GPS, GLONASS(20000 km)
GALILEO (24000 km)LAGEOS-1,2 (6000 km)
-високо орбітальні (GEOGeostationary Orbit) , 36000 км
-геліосинхронні (IGSOInclined Geosynchronous Orbit) – орбіта,
підсупутникова точка якої завжди освітлена під сталим кутом падіння променя
- високоеліптичні (HEO - Highly Elliptical Orbit), супутники, досягають висот більше 35000 км над поверхнею Землі
по нахиленню:
Екваторіальні орбіти, нахил "i" = 0 ° Полярні орбіти, нахил "i" = 90 ° Сонячно-синхронні орбіти
Типи орбіт супутника:
-колова
-еліптична,швидкість >V1
-параболічна , швидкість < V2
-гіперболічна , швидкість > V2
Їхня орбіта залежить від швидкості ,яку їм надали .(перша,друга, третя космічні швидкості)