Уничтожение полукруговой девиации способом Колонга.
В отличие от способа Эри в рассматриваемом случае уничтожение полукруговой девиации осуществляется на четырех главных компасных курсах При этом принимается, как правило, имеющее место на практике допущение об относительной малости СМС АHи ЕH
При выполнении работ устраняется или уменьшается не наблюдаемая девиация, а непосредственно CMC ее вызывающие. С этой целью на указанные выше компасных курсах судна производится измерение горизонтальной составляющей Н судового магнитного поля. При принятых допущениях эта составляющая на курсах 0° и 180° будет определяться судовыми магнитными силами H, ВHиDH.
К ак
следует из рисунка:
ак
следует из рисунка:
HN = H cosN + DHcosN + BH
HS = H cosS + DHcosS - BH
Совместное использование указанных равенств позволяет отделить силы порождающие интересующую нас полукруговую девиацию, от сил ее не порождающих. Действительно, если вычислить среднее значение 0,5(HN+HS) напряженностей магнитного поля, измеренных на противоположных курсах судна, то это значение не будет зависеть от CMCBH:
Нср = 0,5(HN + HS) = (H + DH)cos
Следовательно, значение силы BH будет определяться разностью междуHN илиHSи Нср.
Напряженность судового магнитного поля измеряется с помощью дефлектора, путем компенсации измеряемого поля полем его магнитов. Принимая во внимание сказанное, становится очевидной методика устранения полукруговой девиации. Действительно, зная величину Нср и выставив ее значение на дефлекторе, установленном на пеленгаторе компаса, мы с его помощью компенсируем указанную составляющую судового магнитного поля на одном из рассматриваемых курсов (N илиS). В этих условиях на картушку будет действовать только силаBH, которая осталась не скомпенсированной Названная сила устраняется с помощью продольных постоянных магнитов, расположенных в нактоузе МК.
Уничтожение CMC СHпроизводится аналогично рассмотренному на курсах 90° и 270°.
2.3. Анализ работы следящей системы.
|
МК |
0,0° |
30,0° |
60,0° |
90,0° |
120,0° |
150,0° |
180,0° |
210,0° |
240,0° |
270,0° |
300,0° |
330,0° |
360,0° |
|
КК |
0,0° |
30,1° |
60,0° |
89,6° |
119,7° |
150,1° |
179,6° |
209,8° |
240,3° |
269,1° |
299,8° |
330,1° |
360,0° |
|
К |
0,3° |
30,2° |
60,3° |
90,4° |
120,4° |
149,8° |
179,6° |
209,7° |
240,3° |
270,6° |
299,8° |
330,2° |
360,0° |
Девиация находится по следующей формуле. = МК – КК, погрешность работы дистанционной следящей системы находится как разница между КК и К Вычисления приведем в таблице:
|
|
0,0° |
-0,1° |
0,0° |
0,4° |
0,3° |
-0,1° |
0,4° |
0,2° |
-0,3° |
0,9° |
0,2° |
-0,1° |
0,0° |
|
|
-0,3° |
-0,2° |
-0,3° |
-0,4° |
-0,4° |
0,2° |
0,4° |
0,3° |
-0,3° |
-0,6° |
0,2° |
-0,2° |
0,0° |
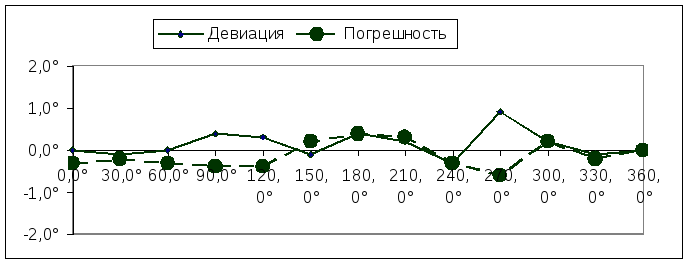
На основе данных таблиц, построим график зависимости Девиации и Погрешности работы дистанционной следящей системы от МК
Из графика видно, что компас имеет неравномерное распределение погрешностей по всему диапазону картушки.