

Практическое занятие № 6
Основные методы обработки сигналов
в радиоэлектронных комплексах
1 Цель занятия
Определение основных демаскирующих признаков сигналов радиоэлектронных комплексов. Изучение основ спектрального и корреляционного анализа.
2 Теоретические сведения
В современных радиоэлектронных комплексах выбор сигналов диктуется прежде всего не техническими удобствами их генерирования, преобразования и приема, а возможностью оптимального решения задач, предусмотренных при проектировании системы. Для того чтобы понять, как возникает потребность в сигналах со специально выбранными свойствами, рассмотрим следующий пример.
2.1. Сравнение сигналов, сдвинутых во времени. Автокорреляционная функция сигнала
Обратимся к упрощенной идее работы импульсного радиолокатора, предназначенного для измерения дальности до цели. Здесь информация об объекте измерения заложена в величине τ – задержке по времени между зондирующим и принятым сигналами. Формы зондирующего u(t) и принятого и(t – τ) сигналов одинаковы при любых задержках.
Система (рис. 6.1) состоит из набора элементов, осуществляющих задержку «эталонного» передаваемого сигнала на некоторые фиксированные отрезки времени τ1, τ2, …, τN. Задержанные сигналы вместе с принятым подаются на устройства сравнения, действующие в соответствии с принципом: сигнал на выходе появляется лишь при условии, что оба входных колебания являются «копиями» друг друга. Зная номер канала, в котором происходит указанное событие, можно измерить задержку, а значит, и дальность до цели.
Подобное устройство будет работать тем точнее, чем в большей степени разнятся друг от друга сигнал и его «копия», смещенная во времени. (Если отличие невелико, то можно ожидать, например, неоднозначного отсчета, когда сигналы будут появляться одновременно на выходе нескольких соседних устройств сравнения.)
Рис. 6.1. Устройство для измерения времени задержки сигналов
Таким образом, мы получили качественное «представление о том, какие сигналы можно считать «хорошими» для данного применения.
Автокорреляционная функция сигнала
Для количественного определения степени отличия сигнала u(t) и его смещенной во времени копии и(t – τ) принято вводить автокорреляционную функцию (АКФ) сигнала u(t), равную скалярному произведению сигнала и копии:
![]() . (6.1)
. (6.1)
В дальнейшем будем предполагать, что исследуемый сигнал имеет локализованный во времени импульсный характер, так что интеграл вида (6.1) заведомо существует.
Некоторые свойства автокорреляционной функции
1. Из (6.1) видно, что при τ = 0 автокорреляционная функция становится равной энергии сигнала:
Bu(0) = Eu.
2. АКФ – четная функция:
Bu(τ) = Bu(–τ). (6.2)
Действительно, если в интеграле (6.1) сделать замену переменных х = t – τ, то
![]() .
.
3. При любом значении временного сдвига τ модуль АКФ не превосходит энергии сигнала:
|Bu(τ)| ≤ Bu(0) = Eu.
Итак, АКФ представляется симметричной кривой с центральным максимумом, который всегда положителен. При этом в зависимости от вида сигнала u(t) автокорреляционная функция может иметь как монотонно убывающий, так и колеблющийся характер.
АКФ неограниченно протяженного сигнала
В этом случае подход к изучению корреляционных свойств сигналов должен быть видоизменен. Будем считать, что неограниченно протяженная во времени периодическая последовательность получается из некоторого локализованного во времени (импульсного) сигнала, длительность которого τu стремится к бесконечности. Для того чтобы избежать расходимости получаемых выражений, определим АКФ как среднее значение скалярного произведения сигнала и его копии:
 .
.
АКФ дискретного сигнала
П
Рис.
6.2. Трехпозтцтонный сложный сигнал. а)
амплитудное кодирование; б) фазовое
кодирование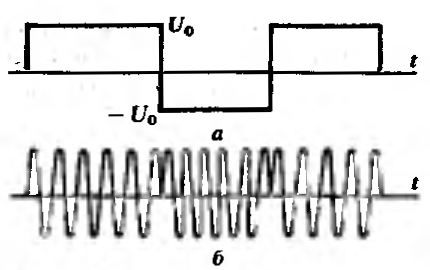
Рис. 6.2 поясняет некоторые способы формирования многопозиционного сложного сигнала. Для определенности здесь М = 3. Видно, что физический облик дискретного сигнала может быть различным. В случае а) символу +1 соответствует положительное значение V0 высоты видеоимпульса, передаваемого на соответствующей позиции; символу –1 отвечает отрицательное значение –V0. Говорят, что при этом реализовано амплитудное кодирование сложного сигнала. В случае б) происходит фазовое кодирование. Для передачи символа +1 на соответствующей позиции генерируется отрезок гармонического сигнала с нулевой начальной фазой. Чтобы отобразить символ –1, используется отрезок синусоиды такой же длительности и с той же частотой, но его фаза получает дополнительный сдвиг на 180°.
Несмотря на различие графиков этих двух сигналов, между ними можно установить полное тождество с точки зрения их математических моделей. Действительно, модель любого такого сигнала – это последовательность чисел {u1, u2, …, uM–1, uM}, в которой каждый символ, принимает одно из двух возможных значений ±1. Для удобства договоримся в дальнейшем дополнять такую последовательность нулями на «пустых» позициях, где сигнал не определен. При этом, например, развернутая форма записи дискретного сигнала {1 1, –1, 1} будет иметь вид …0 0 0 1 1 –1 1 0 0 …
Важнейшая операция при обработке дискретных сигналов состоит в сдвиге такого сигнала на некоторое число позиций относительно исходного положения без изменения его формы. В качестве примера ниже представлен некоторый исходный сигнал (первая строка) и его копии (последующие строки), сдвинутые на 1, 2 и 3 позиции в сторону запаздывания:
… 0 0 0 1 1 1 1 0 0 0 0 …
… 0 0 0 0 1 1 1 1 0 0 0 …
… 0 0 0 0 0 1 1 1 1 0 0 …
… 0 0 0 0 0 0 1 1 1 1 0 …
Из формулы (6.1)можно получить дискретный аналог АКФ применительно к многопозиционным сигналам:
![]() .
.
Bu(n) – функция целочисленного аргумента и, естественно, обладает многими уже известнымн свойствами обычной автокорреляционной функции. Так, легко видеть, что дискретная АКФ четна.
Bu(n) = Bu(–n).
При нулевом сдвиге эта АКФ определяет энергию дискретного сигнала:
![]() .
.
2.2.Энергетический спектр
Фундаментальная характеристика системы двух вещественных сигналов u(t) и v(t) – их скалярное произведение:
![]() ,
,
пропорциональное взаимной энергии этих сигналов. Если сигналы тождественно совпадают, то скалярное произведение становится равным энергии.
Скалярное произведение сигналов u(t) и v(t) можно выразить через их спектральные плотности U(ω) и V(ω) с помощью обобщенной формулы Рэлея:
![]() . (6.3)
. (6.3)
В равной мере справедливо равенство
![]() ,
,
поскольку скалярное произведение вещественных сигналов является вещественным числом.
Назовем взаимным энергетическим спектром вещественных сигналов u(t) и v(t) функцию
Wuv(ω) = U(ω)V*(ω), (6.4)
такую, что
![]() . (6.5)
. (6.5)
причем Wuv(ω) = W*uv(ω).
При этом, вклад в интеграл (6.5) дает только вещественная часть, т.е. можно записать:
![]() . (6.6)
. (6.6)
Эта формула дает возможность проанализировать «тонкую структуру» взаимосвязи сигналов.
2.3. Связь между энергетическим спектром сигнала и его автокорреляционной функцией
В соответствии с формулой (6.1) АКФ есть скалярное произведение: Bu(τ) = (u, uτ). Здесь символом uτ обозначена смещенная во времени копия сигнала и(t – τ).
Используя обобщенную формулу Рэлея (6.3), можно записать равенство:
![]() .
.
Спектральная плотность смещенного во времени сигнала
Uτ
(ω) = U (ω)
ехр (–jωτ),
откуда
![]() .
.
Таким образом, приходим к результату
![]() . (6.7)
. (6.7)
Квадрат модуля спектральной плотности, как известно, представляет собой энергетический спектр сигнала. Т.е., энергетический спектр и автокорреляционная функция связаны преобразованием Фурье:
![]() .
.
Ясно, что имеется и. обратное соотношение:
![]() . (6.8)
. (6.8)
Эти результаты принципиально важны по двум причинам. Во-первых, оказывается возможным оценивать корреляционные свойства сигналов, исходя из распределения их энергии по спектру. Чем шире полоса частот сигнала, тем уже основной лепесток автокорреляционной функции и тем совершеннее сигнал с точки зрения возможности точного измерения момента его начала. Во-вторых, формулы (6.7) и (6.8) указывают путь экспериментального определения энергетического спектра.
2.4.Взаимокорреляционная функция
В ряде теоретических и прикладных разделов радиотехники бывает удобным ввести особую характеристику совокупности двух сигналов – их взаимокорреляционную функцию (ВКФ), которая описывает как различие в форме сигналов, так и их взаимное расположение на оси времени.
Обобщая формулу (6.1), назовем взаимокорреляционной функцией двух вещественных сигналов u(t) и v(t) скалярное произведение вида
![]() . (6.9)
. (6.9)
Некоторые свойства взаимокорреляционной функции
1. Buv(τ) = Bvu(–τ). В отличие от АКФ одиночного сигнала (6.2), ВКФ, описывающая свойства системы двух неодинаковых сигналов, не является четной функцией аргумента: Buv(τ) ≠ Buv(–τ).
2. Если рассматриваемые сигналы имеют конечные энергии, то их ВКФ ограничена: |Buv(τ)| ≤ || u || · || v ||.
Связь между ВКФ и взаимной спектральной плотностью
ВКФ и взаимный спектр двух сигналов связаны парой преобразований Фурье:
![]() , (6.10)
, (6.10)
![]() . (6.11)
. (6.11)
ВКФ дискретных сигналов
По аналогии с (6.9)
![]() , (6.12)
, (6.12)
где n – целое число, положительное, отрицательное или нуль.