

В.А. Трубецкой, с.Л. Добрынин математическое описание учебного робота рс-121
Приведено решение прямой и обратной задачи кинематики для переносных и ориентирующих степеней подвижности 5-ти координатного манипулятора. Разработана программа, реализующая математические расчеты на реальном объекте
Для получения практических навыков разработки и программирования роботов необходимо наличие материально-технической базы. Современные промышленные роботы зарубежных фирм стоят дорого, поэтому не всегда могут приобретаться вузами для обучения студентов. Кроме того, они не предназначены для экспериментов, связанных с демонтажем и исследованием внутренних элементов конструкции. Система управления также монтируется в закрытом виде. В связи с этим возникает потребность создания учебных роботов, которые являлись бы аналогами современных роботов по кинематическим и динамическим характеристикам, но были бы доступны для процессов разработки и исследования элементов и подсистем роботов.
При выборе варианта кинематической модели манипулятора, как объекта управления, необходимо учитывать возможность реализации роботом сложных программных движений. Это необходимо для имитации широкого круга рабочих операций. Кроме того, важно при создании учебного робота учитывать современные тенденции в области робототехники. Большинство современных роботов выполняются с угловой системой координат, с пятью-шестью степенями подвижности, так как они компактны и позволяют реализовать траектории любой формы. В связи с этим представляется целесообразным и учебный робот, реализованный с учетом данных обстоятельств.
Для постановки и решения задач кинематики составляется расчетная кинематическая модель манипулятора, в основу которой положены геометрические размеры звеньев, а также типы, количество и распределение кинематических пар. Учебный робот имеет пять вращательных степеней подвижности, его принципиальная схема приведена на рис. 1.
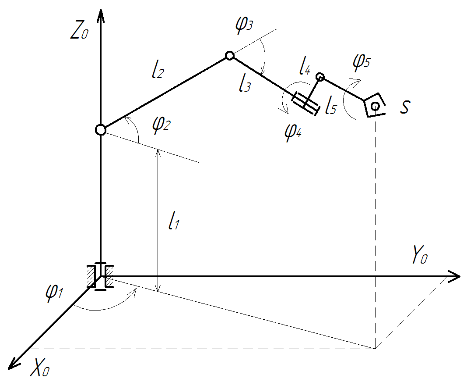
Рис. 1. Кинематическая схема компоновки учебного робота с учетом
переносных и ориентирующих степеней подвижности
Отработка роботом программных движений предполагается в два этапа. На первом этапе обеспечивается транспортировка захватного устройства в заданную точку позиционирования с помощью переносных степеней подвижности.
На втором этапе с помощью ориентирующих степеней подвижности обеспечивается заданная ориентация системы координат связанной с захватным устройством относительно базовой системы координат.
Для решения прямой и обратной задачи кинематики используем расчетную кинематическую модель манипуляционного устройства с учетом только переносных степеней подвижности (рис. 2).
Для данной расчетной схемы уравнения прямой задачи кинематики имеют вид:
![]() (1)
(1)
![]() (2)
(2)
![]() (3)
(3)
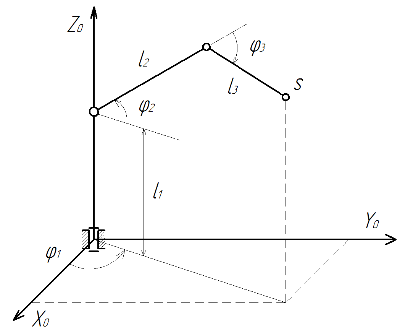
Рис. 2. Кинематическая схема компоновки учебного робота с учетом переносных степеней подвижности
Обобщенные координаты (обратная задача кинематики) определяются с помощью следующих отношений:
![]() (4)
(4)
![]() (5)
(5)
![]() (6)
(6)
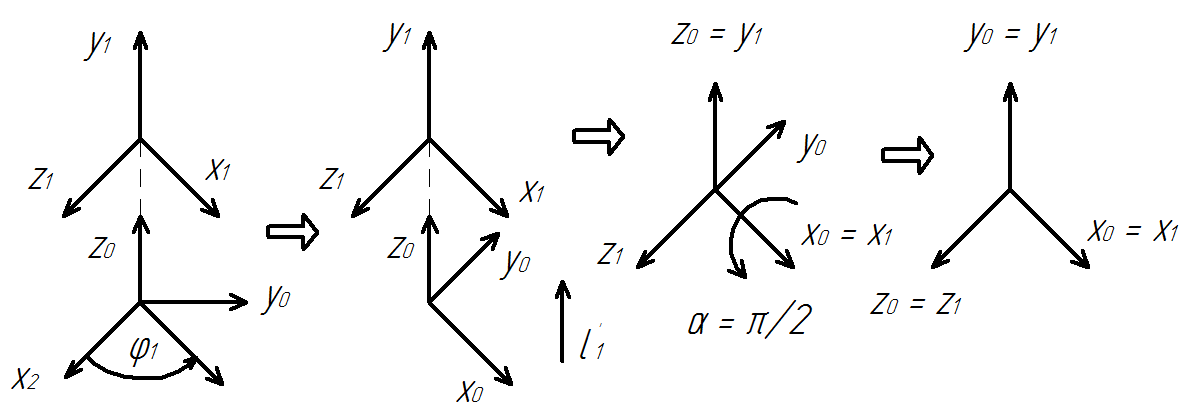
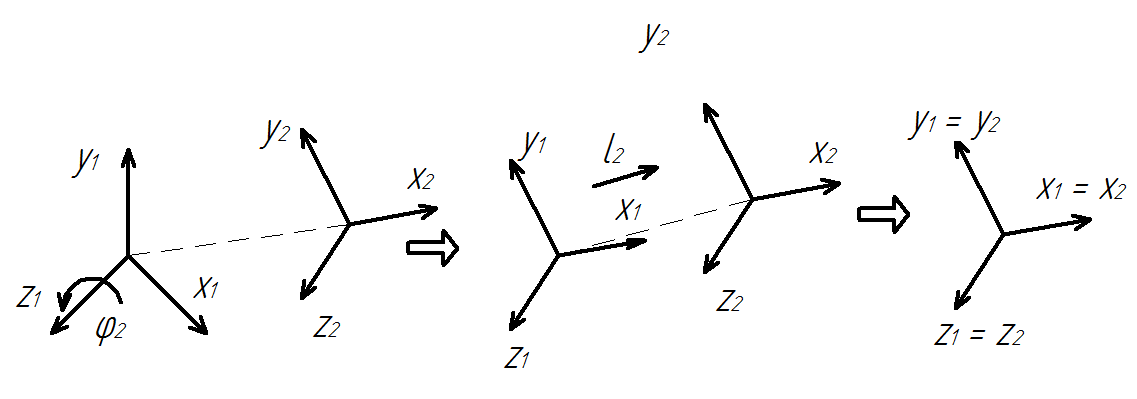
В приведенных выше уравнениях захватное устройство рассматривалось как материальная точка, положение которой задается с помощью трех ортогональных координат. При решении практических задач переноса объекта манипулирования в пространстве таких моделей недостаточно. Необходимо рассматривать захватное устройство как твердое тело, положение которого задается с помощью шести координат: трех ортогональных (X, Y, Z) и трех углов ориентации (α, β, γ). С каждым звеном учебного робота связывает свою систему координат, которая выбирается по определенному заранее правилу (см. табл. 1). Последовательным совмещением последующих систем координат с предыдущими, получим результирующую матрицу положения переносных степеней подвижности учебного робота относительно базовой системы координат. Иллюстрация переходов приведена на рис. 3.
Параметры переходов Таблица 1
КП |
Типы КП |
Параметры матрицы |
|||
γ |
S |
A |
α |
||
0-1 |
Вращ. |
φ1 |
l1` |
l1” |
π/2 |
1-2 |
Вращ. |
φ2 |
0 |
l2 |
0 |
2-3 |
Вращ. |
φ3 |
0 |
l3 |
0 |
T0-1:
T1-2:
T2-3:
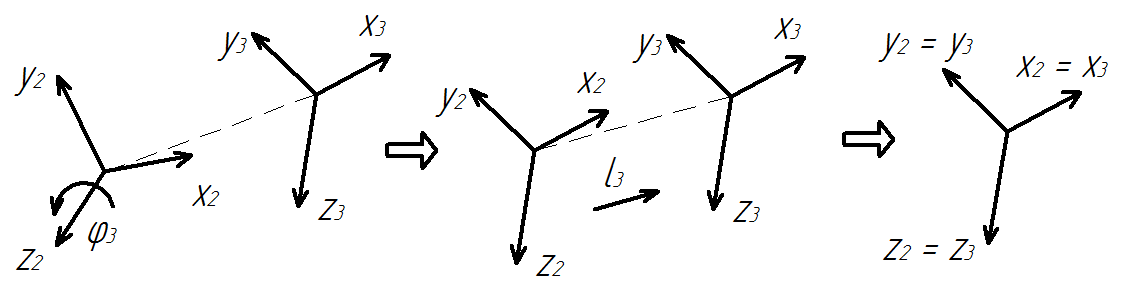
Рис. 3. Иллюстрация совмещений базовой системы координат
с третьей
По табл. 1 переходов строится матрицы состояний:
 (7)
(7)
Учебный робот предназначен для исследования его в процессе выполнения программных движений, связанных с имитацией некоторого производственного процесса. При этом необходимо обеспечивать не только доставку рабочего органа робота в заданную точку, но и необходимую ориентацию захватного устройства в пространстве. Это обеспечивается с помощью ориентирующих степеней подвижности.
Для нахождения модели также используем метод однородных координат. С каждым звеном манипуляционного устройства связывают свою систему координат, которая выбирается по определенному правилу (см. табл. 2). Последовательным совмещением последующих систем координат с предыдущими, получим результирующую матрицу положения захватного устройства относительно переносных степеней подвижности.
 .
(8)
.
(8)
Параметры переходов Таблица 2
КП |
Типы КП |
Параметры матрицы |
|||
γ |
S |
A |
α |
||
3-4 |
Вращ. |
φ4 |
0 |
0 |
π/2 |
4-5 |
Вращ. |
φ5 |
0 |
0 |
π/2 |
С помощью прямой задачи кинематики можно определить геометрические характеристики рабочего пространства и рабочей зоны манипулятора со сложной кинематической схемой при конструктивных ограничениях на обобщенные координаты.
С помощью обратной задачи кинематики определяют обобщенные координаты qi манипулятора по заданному в опорной системе координат положению рабочего органа или некоторого звена манипулятора. Для ее решения и отработки учебным роботом перемещений по обобщенным координатам была реализована соответствующая программа.
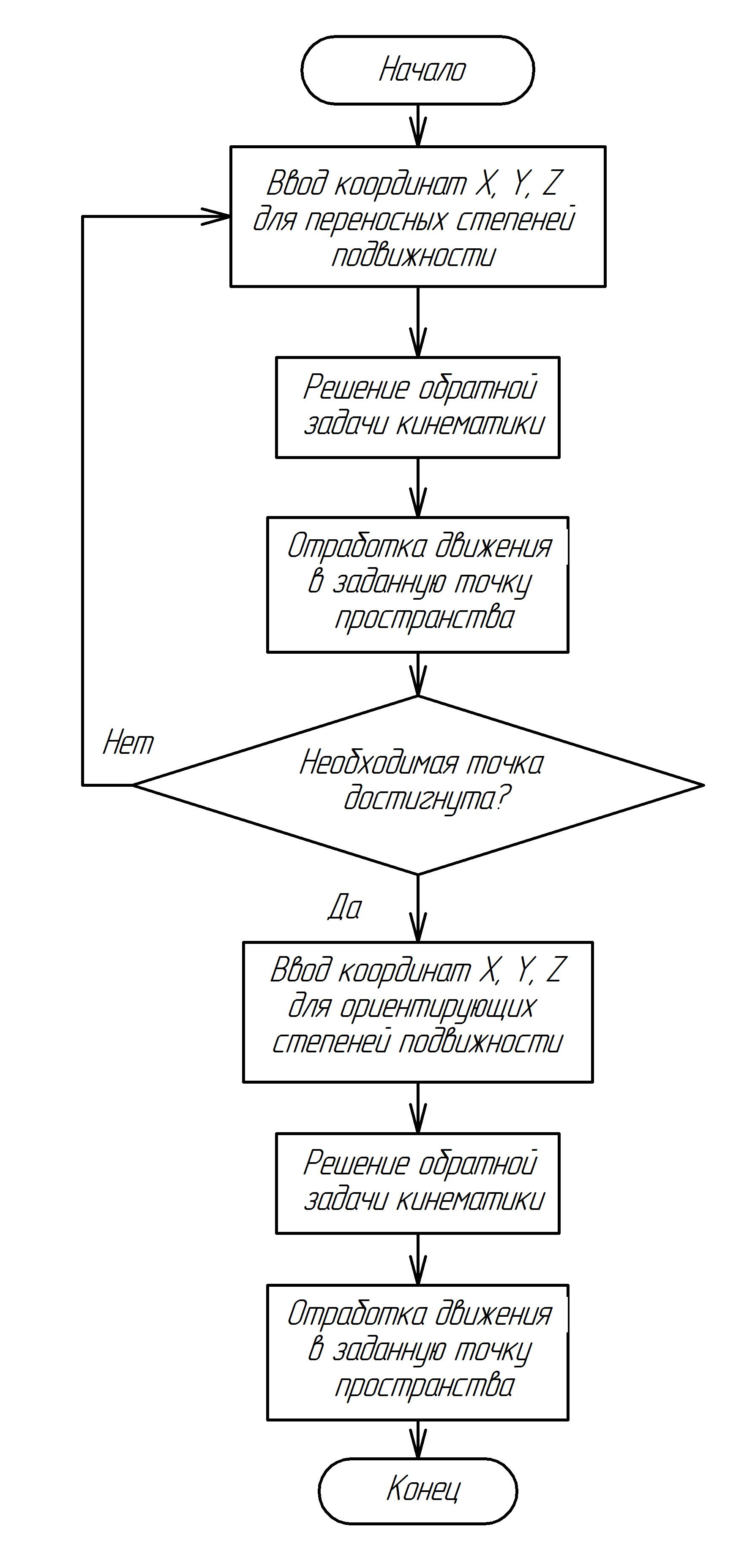
Рис. 4. Алгоритм работы программы
Литература
1. Лукинов А. П. Проектирование мехатронных и робототехнических устройств: Учебное пособие. – СПб.: Издательство «Лань» 2012. – 608 с.: ил. (+CD) – (Учебники для вузов. Специальная литература).
2. Климов А. С., Машнин Н. Е. Роботизированные технические комплексы и автоматические линии в сварке: Учебное пособие. 2-е изд., испр. и доп. – СПб.: Издательство «Лань», 2011. – 240 с.: ил. – (Учебники для вузов. Специальная литература).
Воронежский государственный технический университет
УДК 624.073