

В.А. Трубецкой, а.К. Муконин преобразование координат m-фазной машины. Структуры контура регулирования фазных токов
Приведены линейные преобразования координат для m-фазной машины и два варианта реализации контура регулирования фазных токов с управлением координат вектора тока
Как известно, дифференциальные уравнения машины переменного тока в неподвижной (фазовой) системе координат имеют переменные коэффициенты, зависящие от углового положения ротора. Для избавления от переменных коэффициентов используют линейные преобразования уравнений (преобразования координат), при которых переходят от неподвижной к вращающейся системе координат.
В
теории электрических машин и электропривода
используются различные варианты
координатных преобразований. В частности,
для исследования трехфазных машин
рациональной является такая замена
переменных, при которой от трех фазных
токов
![]() переходят к новым переменным
переходят к новым переменным
![]() ,
причем только две составляющие
,
причем только две составляющие
![]() участвуют в создании результирующей
магнитодвижущей силы статора, т.е. в
создании электромагнитного момента, а
третья составляющая
участвуют в создании результирующей
магнитодвижущей силы статора, т.е. в
создании электромагнитного момента, а
третья составляющая
![]() ,
называемая нулевой составляющей тока,
не влияет на электромагнитный момент.
,
называемая нулевой составляющей тока,
не влияет на электромагнитный момент.
Для m-фазной машины также могут быть предложены различные варианты преобразований координат, когда только две вводимые переменные будут влиять на электромагнитный момент.
Рассмотрим обобщенную идеализированную машину, имеющую m фазных обмоток статора, явнополюсный ротор, обмотку возбуждения статора и демпфирующую обмотку ротора.
Для построения математической модели приняты традиционные для идеализированной машины допущения, в частности, распределение МДС в пространстве по синусоидальному закону, отсутствие насыщения магнитной цепи, симметрия фазных обмоток.
Уравнения
прямого преобразования для токов статора
m-фазной машины, т.е. уравнения перехода
от фазовых координат к вращающейся
системе координат
![]() ,
представлены в виде:
,
представлены в виде:
 (1)
(1)
где
![]() – ортогональные координаты вектора
тока статора
– ортогональные координаты вектора
тока статора
![]() ;
;
![]()
![]() –
n-й
фазный ток статора;
–
n-й
фазный ток статора;
![]() – угловое положение системы координат
относительно оси первой фазы статора;
– угловое положение системы координат
относительно оси первой фазы статора;
![]() ;
;
![]() – к-я
нулевая составляющая тока.
– к-я
нулевая составляющая тока.
Вместо m фазных токов вводятся координаты , участвующие в создании результирующей МДС статора, и (m-2) нулевых составляющих тока , которые результирующей МДС статора не образуют.
Уравнения обратного преобразования координат для токов статора
 (2)
(2)
Аналогичным образом выглядят уравнения преобразований координат для напряжений и потокосцеплений статора.
Взаимная
ориентация осей фаз машины и осей
изображены на рис. 1,б.
Величины
являются ортогональными координатами
вектора тока статора
,
который может быть представлен и
полярными координатами
![]() ,
причем
,
причем
![]() (3)
(3)
С учетом (3) уравнения (2) могут быть записаны как
![]() (4)
(4)
где
![]() определяются по (2).
определяются по (2).
Исходя из (1), (2) для трехфазной машины
![]() (5)
(5)
В соответствии с (5) уравнение (4) для трехфазной машины запишется как
![]() (6)
(6)
где n = 1, 2, 3.
Из полученных выражений следует, что широко используемые преобразования координат трехфазной машины являются частным случаем рассматриваемого варианта линейных преобразований.
Уравнения
(4), (6) наиболее наглядно иллюстрируют
влияние нулевых составляющих тока на
форму фазных токов статора. При равенстве
нулю составляющих
![]() фазные токи синусоидальны, наличие
нулевых составляющих приводит в общем
случае к несинусоидальности фазных
токов, а в частном, когда нулевые
составляющие синусоидальны и изменяются
с частотой основных гармоник, к несимметрии
фазных токов.
фазные токи синусоидальны, наличие
нулевых составляющих приводит в общем
случае к несинусоидальности фазных
токов, а в частном, когда нулевые
составляющие синусоидальны и изменяются
с частотой основных гармоник, к несимметрии
фазных токов.
На
основе полученных линейных преобразований
построена структурная схема m-фазной
машины, приведенная на рис. 1, где
![]() и
и
![]() – ортогональные координаты векторов
напряжения и потокосцепления статора;
– ортогональные координаты векторов
напряжения и потокосцепления статора;
![]() – напряжение обмотки возбуждения
ротора;
– напряжение обмотки возбуждения
ротора;
![]() – активное сопротивление фазы статора;
– активное сопротивление фазы статора;
![]() – оператор дифференцирования;
– оператор дифференцирования;
![]() – угловая скорость системы координат
;
– угловая скорость системы координат
;
![]() – нулевые составляющие напряжения;
– нулевые составляющие напряжения;
![]() – индуктивности, которые определяются
полями рассеяния, создаваемыми нулевыми
составляющими тока.
– индуктивности, которые определяются
полями рассеяния, создаваемыми нулевыми
составляющими тока.

Рис. 1. Структурная схема m-фазной машины
Схема
содержит контур регулирования
электромагнитного момента
![]() и (m-2)
канала регулирования нулевых составляющих
тока, не связанных с контуром регулирования
момента.
и (m-2)
канала регулирования нулевых составляющих
тока, не связанных с контуром регулирования
момента.
Структура полученного контура регулирования момента идентична широко используемой структурной схеме контура регулирования момента обобщенной двухфазной машины. Данное обстоятельство является важным достоинством, так как позволяет использовать для анализа электромеханических переходных процессов и синтеза приводов с m-фазной машиной известные методы.
К преимуществам рассматриваемых преобразований координат следует также отнести то, что их частным случаем являются известные преобразования координат трехфазной машины.
Отмеченные
достоинства линейных преобразований
позволяют рекомендовать их для
исследования m-фазных
машин. Вид структуры контура потокосцеплений
![]() ,
выделенного на рис. 1, зависит от скорости
,
выделенного на рис. 1, зависит от скорости
![]() системы координат. Выбор скорости
и регулируемых переменных определяется
разработчиком привода и во многом
обусловлен требованиями к динамическим
свойствам САР.
системы координат. Выбор скорости
и регулируемых переменных определяется
разработчиком привода и во многом
обусловлен требованиями к динамическим
свойствам САР.
Отличительной особенностью приведенных структур являются наличие (m-2) – х каналов управления нулевыми составляющими тока.
Проиллюстрируем данное утверждение примером, когда усилитель напряжения и регулятор тока представляются совместно апериодическим звеном. В этом случае для привода с обратными связями по мгновенным значениям фазных токов можно записать уравнение
![]() (7)
(7)
где ![]() – изображение фазного напряжения;
– изображение фазного напряжения;
![]() – коэффициент
усиления СУН и регулятора тока;
– коэффициент
усиления СУН и регулятора тока;
![]() –
коэффициент
передачи измерителя тока;
–
коэффициент
передачи измерителя тока;
![]() –
постоянная
времени.
–
постоянная
времени.
Осуществив над (7) операцию прямого преобразования координат, получим
 (8)
(8)
Уравнениям (8) соответствует структурная схема, изображенная на рис. 2.
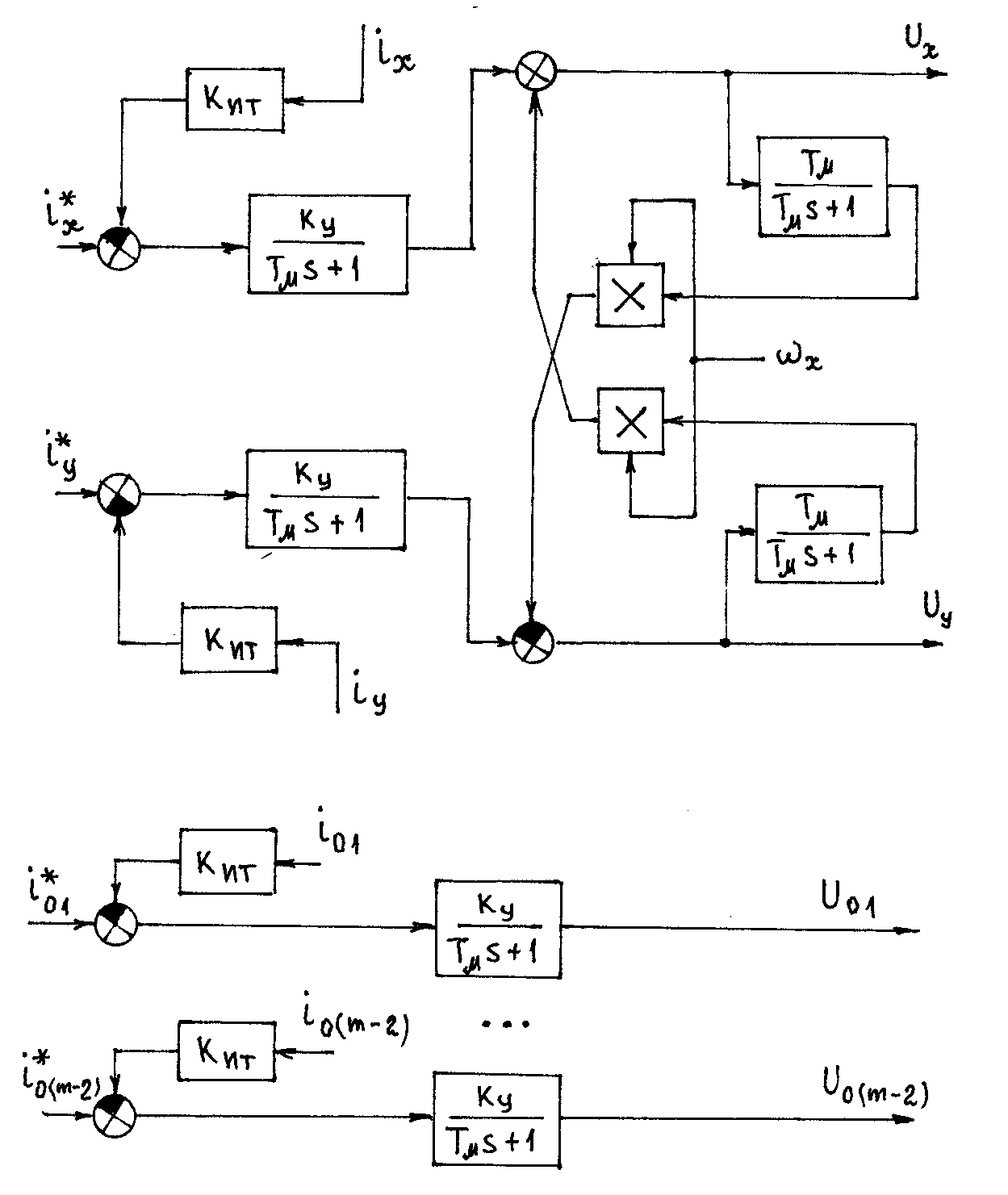
Рис. 2. Схема прямого преобразования координат
Рис. 1 и рис. 2 совместно представляют структурную схему контура регулирования фазных токов. Контуры регулирования фазных токов не связаны с контуром регулирования момента. Отсюда, в частности следует вывод о том, что при исследовании динамики привода с наличием каналов управления нулевыми составляющими тока могут использоваться известные методы.
Как уже отмечалось, наличие нулевых составляющих тока приводит к несинусоидальности фазных токов. Управление нулевыми составляющими тока может оказаться целесообразным для совершенствования ряда характеристик привода.
Литература
Муконин А.К. Частотные приводы с токовым управлением: монография / А.К. Муконин, А.И. Шиянов. Воронеж. ГОУВПО «Воронежский государственный технический университет», 2006. 143 с.
Муконин А.К. Частотно-токовый электропривод / А.К. Муконин, А.П. Харченко, В.А. Трубецкой // Автоматизированный электропривод. М.: Энергоатомиздат. 1990. С. 266-270.
Воронежский государственный технический университет
УДК 517.9