

Учебное пособие 2215
.pdfшин очень подробно изложены в работе [5], выдержки из которой приведены в приложении П. 3.
5.3. ПОРЯДОК ПРОВЕДЕНИЯ РАБОТЫ
5.3.1.Изучить методику построения тяговой характеристики графо-аналитическим методом (приложение П. 3).
5.3.2.Изучить методику получения аналитических зависимостей, необходимых для построения тяговой характеристики ЗТМ на ПЭВМ.
5.3.3.Сформировать массив исходных данных для построения тяговой характеристики на ПЭВМ.
5.3.4.Определить граничные условия и назначить интервал изменения силы тяги.
5.3.5.Сформировать математическое описание расчета параметров тяговой характеристики (без переписывания формул) и организовать цикл расчета.
5.3.6.Построить тяговую характеристику бульдозера (рыхлителя) по заданным исходным данным (рис. 5.1), заданным преподавателем на ПЭВМ [3].
5.4.Построение тяговой характеристики на ПЭВМ
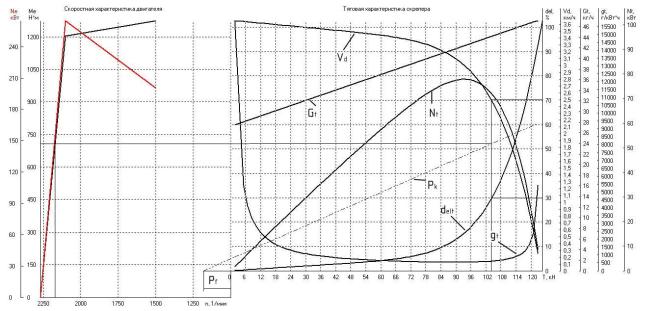
Тяговую характеристику для машин с механической трансмиссией выполняем по программе кафедры СТИМ [3] по исходным данным, представленным на рис. 5.1, сама тяговая характеристика приведена на рис. 5.2.
81
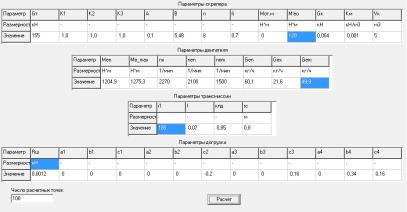
Рис. 5.1. Исходные данные для построения тяговой характеристики на ПЭВМ
5.5.Порядок выполнения работы
5.5.1.Изучить методику построения тяговой характеристики графоаналитическим методом.
5.5.2.Изучить методику получения аналитических зависимостей, необходимых для построения тяговой характеристики ЗТМ на ПЭВМ.
5.5.3.Сформировать массив исходных данных для построения тяговой характеристики на ПЭВМ.
5.5.4.Определить граничные условия и назначить интервал изменения силы тяги.
5.5.5.Сформировать математическое описание расчета параметров тяговой характеристики (без переписывания формул) и организовать цикл расчета.
5.5.6.С помощью тяговой характеристики исследовать влияние на тяговые качества ЗТМ (проиллюстрировать полученными графиками).
82
83
Рис. 5.2. Тяговая характеристика ЗТМ
5.5.6.1.Типа движителя и вида опорной поверхности (колесный движитель: А=0,1; В=5,48; n=8, гусеничный движитель: А=0,05; В=1,78; n=12; несвязанный плотный грунт: А=0,12; В=6,58; n=6).
5.5.6.2.Сцепного веса тягача.
5.5.6.3.Изменения передаточного числа первой передачи.
5.5.6.4.Величины отбора мощности.
5.5.7. Подобрать рациональное передаточное число первой передачи для ЗТМ периодического действия (скрепер, бульдозер (допустимая сила тяги при 30% буксовании составляет 0,73…0,75 Тφ) и непрерывного действия (автогрейдер, грейдер-элеватор, допустимая сила тяги при 20% буксовании составляет 0,7…0,73 Тφ).
5.6.ФОРМА ОТЧЕТА
5.6.1.Цель работы.
5.6.2.Сформулируйте назначение тяговой характеристики
иукажите методы её построения.
5.6.3.Поясните взаимосвязь зависимостей, характеризующих работу двигателя и движителя по тяговой характеристике.
5.6.4.Приведите математическое описание тяговой характеристики и организуйте цикл вычислений на ЭВМ.
5.6.5.Приведите результаты исследований тяговых качеств ЗТМ в соответствии с п. 4.5.6 порядка выполнения работы и выполните обоснование каждого из них.
КОНТРОЛЬНЫЕ ВОПРОСЫ
1.Поясните назначение тяговой характеристики ЗТМ и методы её построения.
2.Каким образом на тяговой характеристике осуществляется связь между параметрами двигателя и движителя?
84
3.Назовите основную зависимость тяговой характеристики.
4.В каких случаях происходит остановка ЗТМ при работе и как это можно установить с помощью тяговой характеристики?
5.Назовите производные зависимости тяговой характери-
стики.
6.Как влияет передаточное число первой передачи на тяговые качества ЗТМ?
7.Как влияют сцепной вес и величина отбора мощности на тяговые качества ЗТМ?
8.Почему рациональное значение передаточного числа первой передачи для ЗТМ цикличного и непрерывного действия различаются?
Лабораторная работа № 6
ИССЛЕДОВАНИЕ АВТОГРЕЙДЕРА
6.1. ЦЕЛЬ РАБОТЫ Ознакомиться с основными конструкциями автогрейде-
ров, их рабочим оборудованием, методами расчета производительности и прогрессивными конструкциями агрегатирования серийных автогрейдеров.
6.2.ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ
6.2.1.Назначение, классификация и применение
Автогрейдеры являются землеройно-транспортными машинами (рис. 6.1) с отвальным и другими рабочими органами (рис. 6.2) и предназначены для послойной разработки и перемещения грунтов при планировке и профилировании строительных площадок и земляного полотна дорог, очистки их от снега и др. видов работ.
85

Рис. 6.1. Автогрейдер [http://www.tdsmi.ru/avtogreyder-dormash-dormash-dz-298/]
Всилу особенностей своей конструкции автогрейдер является одной из наиболее универсальных машин, используемых в дорожном строительстве. Автогрейдеры широко применяются для возведения земляного полотна, на устройстве дорожных оснований и покрытий, на разнообразных планировочных работах, а также при ремонте и содержании дорог.
Вклассификации строительных и дорожных машин по технологическому признаку автогрейдеры часто выделяют в отдельную группу так называемых профилировочных машин, так как основным назначением их является профилирование и отделка земляного полотна. Однако правомерно будет также отнести автогрейдеры к более широкой группе землеройнотранспортных машин, так как они производят как разработку, так и перемещение грунта, позволяют осуществить почти весь комплекс земляных работ – резание грунта, транспортировку его к месту укладки, укладку и разравнивание.
Главным параметром автогрейдера является мощность двигателя.
Взависимости от эксплуатационной мощности двигателя (кВт) автогрейдеры разделяют на 4 класса: 100; 140; 180; 250 (ГОСТ 11030-93).
86

Рис. 6.2. Рабочие органы автогрейдера: основная тяговая рама с поворотным кругом и основным
отвалом; передний отвал; оборудование кирковщика [https://novosibirsk.tiu.ru/p6465866-zapasnye-chasti- avtogrejderu.html]
Важным параметром, характеризующим автогрейдер, является его колесная формула:
A x Б х В,
где А – число осей с управляемыми колесами; Б – число осей с ведущими колесами;
В– общее число осей.
Современные автогрейдеры выполнены по единой прин-
ципиальной схеме и представляют собой самоходную трехосную машину (рис. 6.3) с полноповоротным отвалом и гидравлической системой управления рабочими органами.
Все основные агрегаты автогрейдера располагаются на основной (хребтовой) раме 6 (рис. 6.4). Двигатель, коробка передач и кабина с органами управления установлены на подмоторной её части.
87
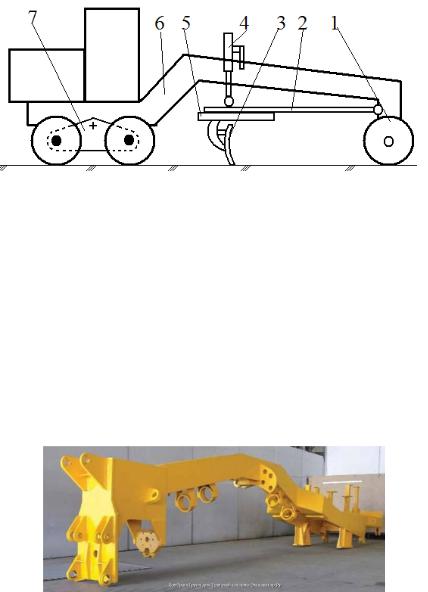
Рис. 6.3. Автогрейдер с колесной формулой 1х2х3:
1 – передний управляемый мост; 2 – тяговая рама; 3 – основной отвал; 4 – гидроцилиндры подъема-опускания отвала; 5 – поворотный круг; 6 – основная (хребтовая) рама;
7 – балансирная тележка с задними ведущими колесами
Задние ведущие колеса расположены на шарнирно соединенным с основной рамой балансире [9]. Передний управляемый мост 1 посредством продольного шарнира соединяется с передней части хребтовой балки, где также закреплена с помощью шарового шарнира тяговая рама со смонтированным на ней поворотным кругом 5 (рис. 6.5) с отвалом 2, задняя часть которой перемещается гидроцилиндрами 4, установленными на основной раме.
Рис. 6.4. Основная (хребтовая балка) автогрейдера [https://detali-tehniki.tiu.ru/p7273094-avtogrejder-122.html]
88

Ходовое оборудование, состоящее из заднего балансирного ведущего (рис. 6.6) и переднего управляемого (ведомого или ведущего) мостов обеспечивает создание необходимого тягового усилия, передвижение и управление машиной. Балансирная подвеска колес обеспечивает увеличение сцепления колес с грунтом за счет лучшей приспособляемости их к его неровностям и повышение планирующих качеств.
Рис. 6.5. Поворотный круг автогрейдера [http://www.dz-98.com/shop/avtogreideri/item_169/]
В настоящее время расширилось использование шарнир- но-сочленной конструкции основной рамы (рис. 6.7), позволяющей значительно снизить радиус поворота машины и получить ряд технологических преимуществ, повышающих производительность автогрейдера. Передняя и задняя части основной рамы соединяются между собой с помощью вертикального шарнира, расположенного обычно под кабиной (рис. 6.8), что позволяет при относительно небольших углах складывания (около ± 20О) уменьшить радиус поворота в 1,5...2 раза и обеспечить смещение передних колес относительно задних при прямолинейном движении до 2000 мм.
89

Тяговые свойства автогрейдера, его устойчивость, маневренность и планирующие способности во многом зависят от его колесной формулы. Большинство выпускаемых в настоящее время автогрейдеров имеют колесную формулу 1 x 2 х 3. Колесная формула 1 x 3 х 3 обеспечивает автогрейдеру высокие тяговые качества и проходимость, однако такие машины значительно сложнее конструктивно, а, следовательно, более дороги в производстве и эксплуатации.
Рис. 6.6. Балансир автогрейдера [https://surgut.chtz-trak.ru/dz-298-3.html]
Управляемая ось автогрейдеров представляет собой балку с колесами, шарнирно закрепленную в средней части, управляемые колеса которой обычно снабжаются еще и механизмом наклона, при помощи которого они могут устанавливаться под углом к вертикали. Наклонная установка колес улучшает восприятие машиной боковых нагрузок и увеличивает ее устойчивость.
На всех выпускаемых в настоящее время автогрейдерах для привода ведущих колес и системы управления применяется один общий дизельный двигатель, соединенный с механической или гидромеханической трансмиссией.
90