


3.4. Электромеханические системы
Механические элементы, также как и электрические, между собой объединяются (соединяются) в системы. В табл. 3.3 [8] представлены электрические аналоги некоторых механических систем.
|
|
|
|
Таблица 3.3 |
|
Электрические аналоги механических систем |
|||||
|
|
|
|
|
|
Механическая система |
Электрический ана- |
Формула |
|||
лог (схема) |
|||||
|
|
|
|
||
|
F /υ = zM = rM +iωm+1/(iωcM ) |
||||
|
ω0 |
=1/ |
|
|
|
|
mcM |
||||
F /υ = zM = i mm/cMi c
ω +1/( ω M )
ρ = 
 m/cM
m/cM
F1 /F2 =υ2 /υ1 = l2 /l1
υ2 /υ1 = F1 /F2 = pS1 / pS2 = S1 /S2
41

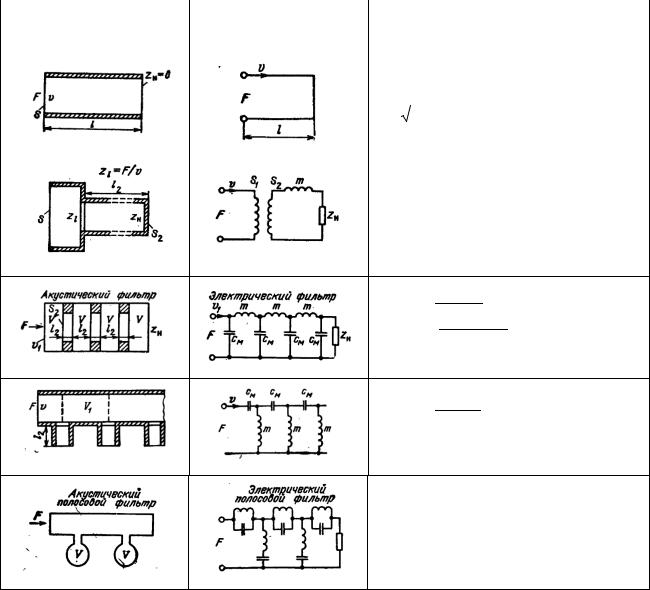
3.5. Электроакустические системы
Электроакустические системы по характеру колебаний относятся к электромеханическим системам, но не содержат дискретных масс, пружин, гибких подвесов и трущихся деталей. Их функции выполняют частицы среды-воздуха, содержащихся в определ нных объ мах и также имеющих массу, гибкость, плотность, колебательную скорость и т.д. Эти объ мы сообщаются с внешней средой через трубы, отверстия и другие звукопроводы.
При рассмотрении электроакустических аналогий звуковое давление p считают аналогом электрического напряжения U, колебательная скорость υ — аналогом плотности тока i, объемную скорость колебаний V =υS (S — площадь поперечного сечения звукопровода) — аналогом силы тока. В таблице 3.4 [8] представлены электрические аналоги наиболее распростран нных акустических систем.
Таблица 3.4
|
Электрические аналоги акустических систем |
||
|
|
|
|
Акустическая |
Электрический ана- |
Входное сопротивление |
|
система |
лог (схема) |
||
|
|||
|
|
zвх = i/(iωcM ) |
|
|
|
cM =V /(ρc2S2 ) |
|
|
|
|
|
|
|
Для дисков: |
|
|
|
zвх =1/iωcM , rM ≈ ∞, cM = d /ρc2S |
|
|
|
Для мембран: |
|
|
|
1/ zвх =1/rM + jωc′M , c′M = (4...7)cM ; |
|
|
|
zвх = (rM +iωm)/n |
|
|
|
|
|
|
|
zвх = iρcSctg(ωl/c) при l << λzвх =1/iωcM |
|
|
|
cM = l/(ρc2S) |
|
|
|
|
|
42
|
|
|
|
Окончание табл. 3.4 |
|
|
|
|
|
Акустическая |
Электрический |
|
Входное сопротивление |
|
система |
аналог (схема) |
|
||
|
|
|
||
|
zкх |
= iρcStg(ωl/c) при l << λ , |
||
|
zвх |
= iωm , m = ρSl′, l′ = l +1,48r , |
||
|
r = |
|
|
|
|
|
Sπ |
||
|
|
|||
|
Нагрузка на конце широкой тру- |
|||
|
бы zl = (zН +iωm)S22 /S12 |
|||
|
m = ρS2l2 +16ρr2S2 /3π |
|||
m = ρS2l2 , сM =V1 /ρc2S22,
ωгр = 2с
 S2 /l2V1 = 2ω0 ,
S2 /l2V1 = 2ω0 ,
γ = Arth[
 1− 4ω02 /ω2 /
1− 4ω02 /ω2 /
/(1−2ω02 /ω2 )]
m = ρS2,l2′, сM =V1 /ρc2S22,
ωгр = 0,5с
 S2 /V1l2′ = 0,5ω0 ,
S2 /V1l2′ = 0,5ω0 ,
γ = Arch[cos(ωl1 /c)+
+ (cS2 /2ωS1l2 )sin(ωl1 /c)]
3.6. Электромеханические преобразователи
Электромеханические преобразователи преобразуют механическую энергию в электрическую — генераторы и электрическую в механическую — двигатели. С этой точки зрения ГГ, используемые в АС, являются своеобразными двигателями. Преобразователи бывают электродинамическими, пьезоэлектрическими, конденсаторными, электромагнитными, угольными и др.
Электромеханические преобразователи представляют собой четырехполюсники, у которых одна сторона механическая, другая — электрическая. На рис. 3.1 [7] показан линейный четырехполюсник, представляющий пассивный преобразователь колебаний.
43

Рис. 3.1. Эквивалент четырехполюсника
Со стороны входа четырехполюсник представляет собой некоторое сопротивление ZВХ =U1 i1 , состоящее из двух последовательно соединенных час-
i1 , состоящее из двух последовательно соединенных час-
тей: постоянной, не зависящей от сопротивления нагрузки во вторичной цепи, ZC и переменной ZВН , зависящей от тока во вторичной цепи. Исходя из этого,
можно написать, уравнение
U1 = Z11i1 + Z12i2 илиU1 = Zвхi1 = Zci1 + ZВНi1 , |
(3.5) |
где U1 — напряжение на входе четырехполюсника; i1,i2 — токи на входе и выходе четырехполюсника; Z11 = Zc — постоянная часть входного сопротивления, называемая собственным сопротивлением четырехполюсника; Z12 = K1 —
коэффициент пропорциональности между током во вторичной цепи и напряжением на переменной части входного сопротивления, называемой вносимым со-
противлением Zвн .
Собственное входное сопротивление определяют при работе четырехполюсника на холостом ходу:
Zc = Ui11 i2=0 ,
а вносимое сопротивление Zвн =U1 /i1 −Zc = Zвх −Zc . Со стороны выхода че-
тырехполюсник представляет собой генератор с ЭДС ,определяемой током в первичной цепи, и внутренним сопротивлением Z22 . Исходя из этого, можно
писать уравнение
U2 = z21i1 + z22i2 илиU2 = ε2 − zii2 , |
(3.6) |
где U2 — напряжение на выходе четырехполюсника; Z22 = Zi — внутреннее сопротивление генератора; Z21 = K2 — коэффициент пропорциональности между ЭДС эквивалентного генератора ε2 и током в первичной цепи, называемый коэффициентом связи (он имеет размерность сопротивления). Внутреннее
44

сопротивление генератора определяют при работе четырехполюсника в режиме короткого замыкания:
Zi = Z21 ii12 ZH =0 ,
а коэффициент связи — в режиме холостого хода:
K2 |
= Z21 |
= U2 |
|
|
|
= |
ε2 . |
|
|
i |
|
|
|
|
i |
|
|
1 |
|
i2 |
=0 |
|
1 |
|
|
|
|
Из (3.5) и (3.6) получаем вносимое сопротивление
ZВН |
= |
Z12i2 |
= |
|
Z12ξ2 |
|
= |
Z12Z21 |
|
= |
K1K2 |
|
, |
(3.7) |
||||||
(Z |
|
)i |
|
|
|
|
||||||||||||||
|
|
i |
|
H |
+ Z |
22 |
|
Z |
11 |
+ Z |
i |
Z |
H |
+ Z |
i |
|
||||
|
|
1 |
|
|
|
1 |
|
|
|
|
|
|
||||||||
где ZH — сопротивление нагрузки во вторичной цепи.
Вносимое сопротивление для любого из пассивных преобразователей определяет количество энергии, передаваемой во вторичную цепь. Коэффициент связи — реакция вторичной цепи, определяющая ЭДС, создаваемую во вторичной цепи. В обратимых четырехполюсниках эта реакция одинакова в обе стороны.
Отсюда следует равенство абсолютных значений коэффициентов сопротивлений связи для обоих направлений:
|
U1 /i2 |
|
i =0 |
= |
|
U2 /i1 |
|
i =0 |
или |
(3.8) |
|||||
|
|
|
|
||||||||||||
1 |
2 |
|
|||||||||||||
|
|
||||||||||||||
|
K1 |
|
= |
|
K2 |
|
= KCB. |
|
|
||||||
|
|
|
|
|
|
||||||||||
Рассмотрим электродвигатель, электромеханическую систему, модель которой представлена на рис. 3.2 [7].
Рис. 3.2. Модель электродвигателя
Для двигателя вносимое электрическое сопротивление
45