

Учебное пособие 1969
.pdfкинематической схеме манипулятора, например, ангуально-вертикального типа.
Введем следующее обозначение: n - число звеньев кинематической цепи, k - число кинематических пар пятого класса, l - число передач парал-
лельных звену, z - число передач через шарнир, р - число приводов. На схе-
мах обозначены: звенья - прямыми линиями, кинематические пары - круж-
ками, за исключением нулевой пары (поворота), для нее принято обычное изображение поворотного шарнира, передачи - линиями со стрелкой, пере-
дачи через шарнир - треугольниками, приводы - квадратами. Для схемы на рис. 1.4 в общем случае
|
n |
|
n 1 |
l |
n |
r |
n , |
|
1 |
|
1 |
где l - суммарное число передач;
г- суммарное число передач через шарнир.
Вконкретном случае
l = 6 ; r
= 6 ; r = 3.
= 3.
Для схемы на рис.
l n k p |
r 0 |
Конкретно L = 3.
= 3.
Для схемы на рис.
|
|
n |
1 |
|
n 2 |
|
|
l li |
n |
r |
n , |
|
|
1 |
|
|
1 |
Здесь li=l1=1 |
- число подвижных оснований, в конкретном случае |
||||
l |
=4; r |
=1. |
|
|
|
Введем в рассмотрение однокоординатную (рис. ) и двухкоординат- |
|||||
ные (рис. |
) внешние магнитные системы применительно к схеме рис. . |
||||
21
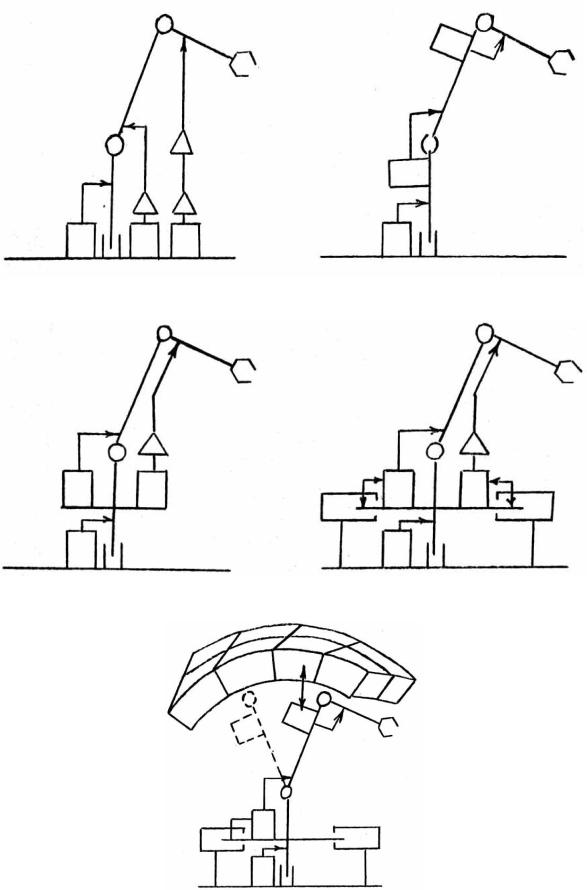
Рис. 1.4 |
Рис. 1.5 |
Рис. 1.6 |
Рис.1.7 |
Рис. 1.8
22
Их связь с подвижными приводами, т.е. укрепленными на звеньях обо-
значена линией с двумя стрелками.
Рис. иллюстрирует структуру, рассмотренную в начале, на рис.
Данные по этой структуре совпадают с данными структуры рис. , т.е., l IV=4; r IV=1, отличие состоит лишь в облегчении подвижной части приво-
дов, укрепленных на подвижном основании (первое звено).
Схема же со сферической, двухкоординатной магнитной системой, по-
казанная на рис. фактически является схемой рис. . То есть, наряду с об-
легчением подвижной части достигнуто уменьшение числа передач. Передач же через шарнир вообще нет в конкретном случае. Таким образом, при при-
менении внешних магнитных систем наблюдается и уменьшение массы под-
вижной части привода, и упрощение кинематической структуры.
Для выбора конкретной кинематической структуры целесообразно ис-
пользовать критерий минимума массы подвижных частей:
|
mпч mн mk |
ml mr |
mp min , |
где mн; mk; ml; mr; mp – соответственно массы звеньев, шарниров (под- |
|||
шипников), |
передач линейных, |
передач через шарнир, подвижных приво- |
|
дов. При |
этом масса подвижной части приводов с внешними системами: |
||
однокоординатной и двухкоординатной, |
естественно, меньше массы при- |
||
вода обычного исполнения. |
|
|
|
Кроме данного критерия целесообразно использовать критерий мини-
мальной жесткости, связанный с минимизацией числа передач и мини-
мальный конструктивной сложности, связанный с минимизацией числа пере-
дач через шарнир.
Рассмотрим различные конструктивные модификации орбитального привода роботов, работающих в цилиндрической системе координат.
1. Робот с орбитальным приводом охвата.
23
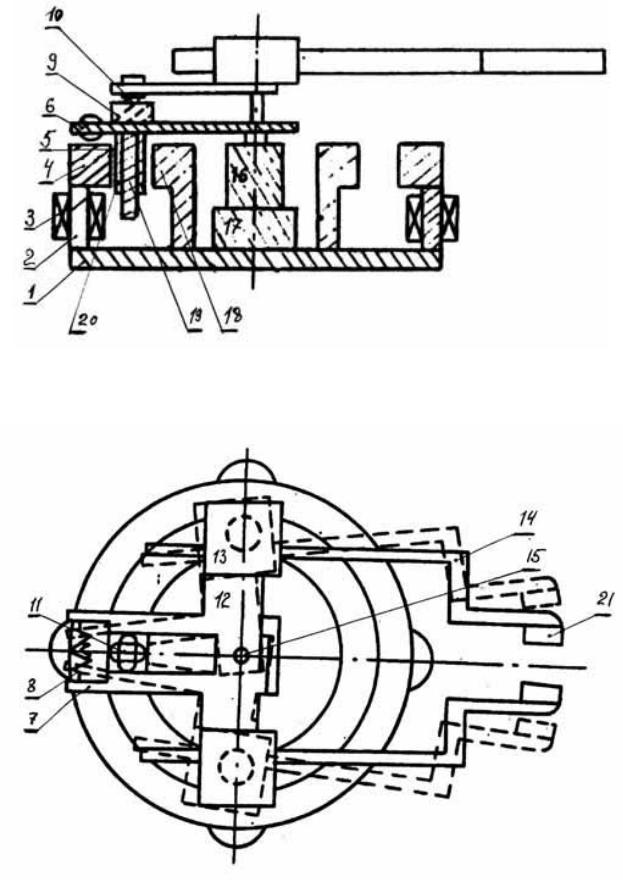
Рис. 1.9
Рис. 1.10
24
Сущность конструкции иллюстрируется чертежом, где на рис. 1.9 пока-
зан схематичный робот, разрез вертикальной диаметральной плоскости, на рис. 1.10 показан вид сверху робота.
Промышленный робот имеет основание 1, на нем укреплены сердечни-
ки 2 с катушками 3 и верхними внешними полюсными наконечниками 4. В
кольцевом воздушном зазоре 5 размещены кронштейны якорей, которые закреплены на платформе 6. Имеются толкатели 7, которые притянуты один к другому пружиной 8. Привод захвата 9 имеет вал 10, на котором закреплен кулачок 11. Толкатели укреплены на полурамах 12, на каждой из которых имеется привод 13 выдвижения рук 14. Полурамы и платформа установлены в центральном подшипнике 15, который, в свою очередь установлен на вы-
ходном штоке привода подъема 16. Имеется и привод поворота 17. В коль-
цевом воздушном зазоре, образованном полюсными наконечниками 18,
расположены якори 19 приводов 13, закрепленные в кронштейнах 20. На руках 14 укреплены накладки 21 губок охвата.
Устройство работает следующим образом. Подъем и поворот рук осу-
ществляется приводами 16 и 17, выдвижение - с помощью приводов 13. Ку-
лачок 11 привода 9 обеспечивает срабатывание охвата. Перемещение якорей
19 происходит в кольцевом зазоре 5 при повороте и подъеме руки. При ра-
боте устройства происходит захват объекта манипулирования губками 21 и
перемещения его в пространстве. Сам захват осуществляется следующим образом. При вращении вала 10 привода 9, и, следовательно, кулачка 11, он,
действуя на толкателя 7 полурам 12, приводит к изменению положения полу-
рам 12, и губок 21, то есть, к разжатию или сжатию губок охвата. Полурамы
12 при этом подпружинены пружиной 8. Работа привода 9, установленного на платформе 6, и приводов 13 возможно в любом угловом положении руки,
поскольку якори 19 в кронштейнах 20 перемещаются в кольцевом зазоре 5.
Разжатый схват показан на рис. пунктиром.
25
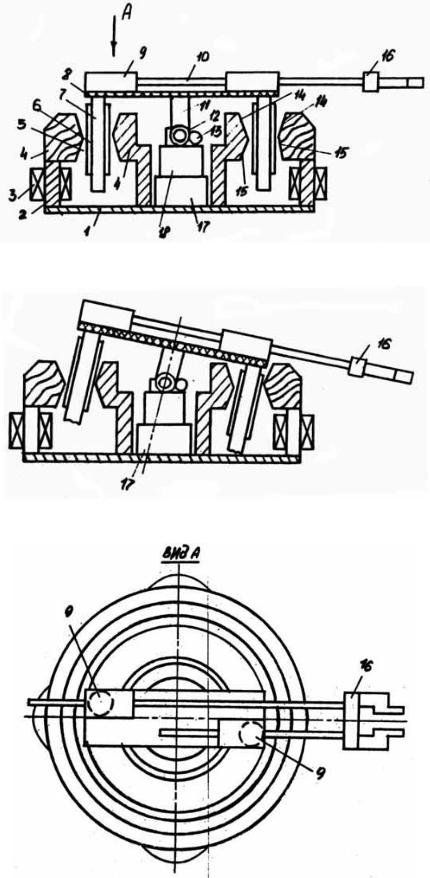
Рис. 1.11
Рис. 1.12
Рис.1.13
26
Губки 21 могут быть установлены на внешней стороне рук-реек 14 и
захватывать детали изнутри.
В любом случае полурамы 12 поворачиваются друг относительно дру-
га, что позволяет захватывать детали различных размеров.
Технико-экономическим преимуществом устройства является расши-
ренные функциональные возможности за счет манипулирования с изделия-
ми различных размеров и повышенная надежность, вызванная отсутстви-
ем собственно привода охвата, его выносом на основание 6 при этом данное преимущества подкреплены сравнительно простым конструктивным реше-
нием привода охвата, выполненным в виде отдельных полурам с накладками-
губками на концах.
2. Привод робота со скосами магнитной системы.
Сущность конструкции иллюстрируется чертежом, где на рис. 1.11 по-
казан схематично робот, разрез в вертикальной диаметральной плоскости на
рис. 1.12 показан тоже, но робот наклонен в |
вертикальной плоскости. |
На |
рис. 1.13 показан вид сверху. |
|
|
Промышленный робот имеет основание 1, на нем укреплены сердечни- |
||
ки 2 с катушками 3 и верхними внешними |
полюсным наконечниками |
4. |
В кольцевом воздушном зазоре 5 размещены кронштейны 7 якорей 6. |
На |
|
вращающемся основании (платформе) 8 размещены приводы 9 выдвижения руки и захвата с рейками 10. Основание 8 установлено на выходном звене 11
шарнира 12 поворота в вертикальной плоскости. На концах реек установлен захват 13. Полюсные наконечники имеют верхний конусный скос 14 и ниж-
ний скос 16. В шарнире 12 выходное звено вращается приседом 15. Имеет-
ся также привод поворота 17, привод подъема 18. Аналогичные скосам 14 и 16 скосы имеются и на внутреннем наконечнике 19 симметрично скосам на наконечнике 4.
Работа устройства осуществляется следующим образом. Поворот руки вызывает привод 17, подъем - привод 18. Выдвижение руки осуществляется
27
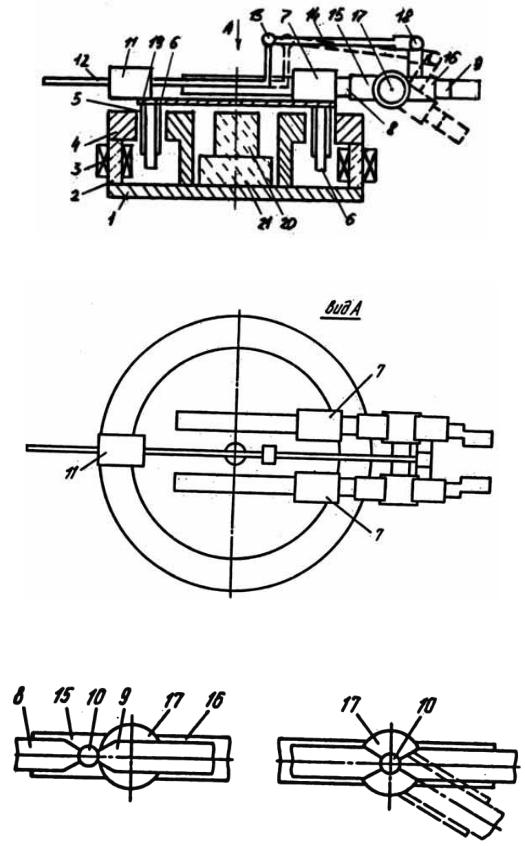
Рис. 1.14
Рис. 1.15
Рис. 1.16 |
Рис. 1.17 |
28
одновременной работой приводов 9, как и вдвижение. Поворот в верти-
кальной плоскости осуществляется приводом 15, прикрепленным к верти-
кальной стойке 11. Перемещение якорей 6 происходит в кольцевом зазоре 5
при повороте и подъеме руки.
При работе устройства происходит захват объекта манипулирования,
причем становится возможным как обычное перемещение, так и поворот объекта в вертикальной плоскости. Рассмотрим это подробнее. При верти-
кальном положении звена 11, показанном на рис. , работа робота |
не от- |
личается от выше рассмотренного. При положении же, как на рис. |
, когда с |
помощью привода 15 звено 11 наклонено в вертикальной плоскости, реали-
зуется дополнительная степень подвижности. В результате схват наклоняется в вертикальной плоскости на требуемый угол. При этом даже при повороте робота, якори 6 не выходят из зазора, образованного скосами на полюсных наконечниках 4 и 19.
Расположение дополнительного привода 16 перпендикулярно цен-
тральной оси увеличивает маневренность робота.
3. Привод робота с внешними шарнирными обоймами.
На рис. 1.14 показан схематично робот, разрез вертикальной диамет-
ральной плоскости, на рис. 1.15 показан вид сверху робота. На рис. 1.16 и 1.17 показан продольный разрез штока с шарнирами при несовпадении осей и совпадении осей.
Промышленный робот имеет основание 1, на нем укреплены сердечни-
ки 2 с катушками 3 и верхними внешними полюсными наконечниками 4. В
кольцевом воздушном зазоре 5 размещены кронштейны якорей. На вра-
щающемся основании (платформе) 7 размещен привод 8 штока б. В крон-
штейнах 9 установлены якори 10 приводов. Имеется внутренний полюсной наконечник 11. Штоки 12 основных приводов выдвижения несут шарниры и схват. К штоку 6 через шарнир 13 прикреплена тяга 14. К штокам 12 прикре-
29
плены внешние обоймы 15 с внешним шарниром 16. Тяга 14 через шарнир
17 и рычаг 18 связана с внешней обоймой 19. На концах штоков установлен схват 20. Основание 7 закреплено в центральном подшипнике 21, который укреплен в штоке привода подъема 22, а привод подъема установлен на при-
воде поворота 23. Штоки 12 состоят из внутреннего штока 24 и внешнего штока 27, связанных шарниром 26. Шарнирные обоймы имеют внутренние обоймы 25 и внешние обоймы 29, связанные шарниром 28. Приводы выдви-
жения 30 размещены, как и привод 8 на платформе 7.
Устройство работает следующим образом. Поворот и подъем руки осу-
ществляется приводами 22 и 23, выдвижение - с помощью приводов 30 и 8.
Они же при раздельной работе обеспечивают срабатывание схвата 20. Пе-
ремещение якорей 10 происходит в кольцевом зазоре 5 при повороте и подъеме руки. При работе устройства происходит манипулирование, причем становится возможным как обычное перемещение, так и поворот объекта в вертикальной плоскости. Рассмотрим это подробнее. При положении штоков и обойм, показанных на рис. - работа робота не отличается от прототипа.
При положении же, как на рис. , когда оси шарниров 26 и 28 совпадают,
и если при этом штоки б и 12 движутся не синхронно, то шток 6 через шар-
нир 13 действует на тягу 14, шарнир 17, рычаг 18 и на обойму 19 схвата 20.
В результате схват наклоняется в вертикальной плоскости на требуемый угол. При положении на рис. такой поворот, естественно, невозможен.
Внутренняя сторона 25 обоймы 25 контактирует со штоком 24, а внутрен-
няя сторона 29 обоймы 19 контактирует со штоком 27. При повороте охвата шарнир 26 располагается концентрично шарниру 28. При любом угле по-
ворота основание 7 приводом 23 будет осуществляться нахождение якорей
10 в кольцевом воздушном зазоре 5. Оси шарниров 26 и 16 расположены перпендикулярно штокам 12 в горизонтальной плоскости. Крепление штока дополнительного привода шарнирно обеспечивает требуемую маневрен-
ность.
30