

Глава 2. Проектирование привода и элементов системы включения механических прессов
2.1. Расчет клиноременной передачи
Большинство современных кривошипных машин для соединения двигателя с маховиком имеют клиноременные передачи. Широкое использование клиноременных передач обусловлено их преимуществами по сравнению с ранее применявшимися плоскоременными передачами.
Они обеспечивают меньшие межосевое расстояние между валами, большую тяговую способность и безопасность при обрыве ремня, увеличивают диапазон передаточных чисел, уменьшают силы натяжения ремней и силы, действующие на валы и опоры. Работоспособность передачи не зависит от ее расположения в пространстве.
Проскальзывание в ременной передаче при холостом ходе и нагрузках оказывает благоприятное влияние на работу электродвигателя, так как за счет дополнительного скольжения уменьшается момент инерции маховика, а при значительных перегрузках в некоторой степени это является его своеобразной защитой.
Вместе с тем проскальзывание приводит к снижению КПД передачи и интенсивному износу ремней при перегрузках.
В отечественных машинах используют сплошные кордктаневые ремни с сечениями А-Е по ГОСТ 1284.1-80. Проектирование шкивов для клиноременных передач производится в соответствии с ГОСТ 20898-80. Малый шкив передачи закрепляется на валу электродвигателя.
Для создания и поддержания необходимого натяжения ремней в процессе эксплуатации применяются регулировка межосевого расстояния передачи, что осуществляется двумя способами: за счет перемещения электродвигателя по салазкам и с помощью качающихся подмоторных плит, на которых установлен электродвигатель (рис. 21).
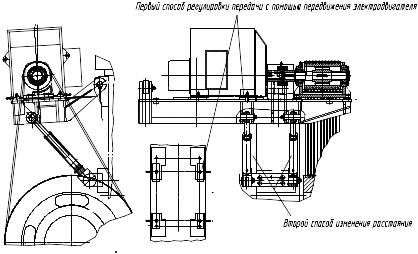
Рис. 21. Известные способы регулировки межосевого расстояния
Исходными данными для расчета передачи являются:
- расчетные диаметры ведущего DP1 и ведомого DP2 шкива;
- ресурс эксплуатации передачи DOLD;
- расчетная длина ремня LP;
- частота вращения ведущего шкива N1;
- передаваемая мощность на ведущем валу; число смен работы передачи в сутки ZT;
- число ремней ZV и тип сечения ремня.
Расчет клиноременной передачи производится в следующей последовательности: сначала по формуле определяется передаточное число:
![]() ,
(2.1)
,
(2.1)
затем скорость ремней:
![]() (2.2)
(2.2)
Для ремней типов А-В она не должна превышать 25 м/с, для ремней типов Г-Д 30 м/с.
Значение межосевого расстояния клиноременной передачи можно определить по следующей зависимости:
![]() ,
(2.3)
,
(2.3)
наибольшее значение межосевого расстояния:
![]() (2.4)
(2.4)
наименьшее значение межосевого расстояния:
![]() (2.5)
(2.5)
Угол обхвата ремнем малого шкива определяется по формуле:
![]() (2.6)
(2.6)
Максимальное напряжение в ремне:
![]() (2.7)
(2.7)
Расчетный ресурс ремня определяется по зависимости:
![]() (2.8)
(2.8)
В заключении расчета определяется усилие оттягивания ветви нового ремня
![]() (2.9)
(2.9)
и прогиб ветви ремня при контроле монтажа передачи:
![]() (2.10)
(2.10)
Для обеспечения нормальной работы передачи должны быть выполнены следующие условия: работоспособности: V<VD может быть выполнено или нет, >P также может быть выполнено или нет и DOL<DOLD может быть выполнено или нет.