

1.4. Методика автоматизированного анализа кинетостатических параметров исполнительных механизмов механических прессов
Современное программное обеспечение, например такое САПР, как COSMOSMotion, позволяют кроме значительного ускорения процесса проектирования главных исполнительных механизмов провести полный анализ его поведения с учетом действующих сил, моментов, реакций и т.д. Главным преимуществом подобных САПР является использование в качестве пре-процессора применяемой на предприятии системы автоматизированного проектирования и разработки конструкторской документации.
CAE COSMOSMotion работает под управлением CAD-системы SolidWorks, что позволяет использовать построенную твердотельную модель главного исполнительного механизма в качестве прототипа реальной конструкции. Программа COSMOSMotion искусно встроена в интерфейс SolidWorks. Далее рассмотрим компоненты интерфейса пользователя CAE COSMOSMotion, который состоит из следующих основных частей: меню COSMOSMotion и проводник IntelliMotion.
Меню COSMOSMotion. COSMOSMotion добавляет в главное меню SolidWorks новое меню (рис. 9) для документов сборки. Меню COSMOSMotion содержит все инструменты, необходимые для построения, моделирования и анимирования сборок SolidWorks.
Проводник IntelliMotion. Когда пользователь активирует COSMOSMotion, то появится новое функциональное дерево (рис. 10), называемое проводником IntelliMotion, который появляется в левой части экрана. Этот проводник обеспечит графический иерархический вид модели механизма и поможет осуществить подготовку исходных данных с применением функций drag and drop.

Рис. 9. Меню COSMOSMotion

Рис. 10. Дерево проводника IntelliMotion
В общем виде процесс моделирования механизмов с применением инструментов COSMOSMotion состоит из следующих основных шагов.
Первым шагом при моделировании механизма является определение движения его составляющих частей. Пользователей определяет их движение установкой ограничений. Ограничения определяют, как закреплены твердые тела и как они двигаются относительно друг друга.
Соединения в COSMOSMotion идеализируют их бесконечную упругость, они не имеют масс, и не учитывают любые зазоры или “смазку”. В CAE COSMOSMotion имеется три вида соединений:
соединение, использующее сопряжения относительно движения пары упругих тел посредством их физического соединения;
первичные соединения, использующие вынужденные стандартные геометрические сопряжения;
моделируемые сопряжения используют моделирование контакта между точкой и поверхностью или между двумя поверхностями.
К сопряжениям прикладываются нагрузки, которые ассоциируются с геометрией, и используются определенные ими в следующем контексте: если начало контакта определено как конечная точка границы и если конечная точка двигается под воздействием изменения геометрии, то соединение будет передвигаться вместе с этой конечной точкой.
Соединения, сдерживающие относительные перемещения пары упругих тел их физического соединения. Упругие тела действуют и двигаются как элементарные единицы. Компоненты SolidWorks автоматически становятся упругими телами COSMOSMotion. Следующая Табл. показывает поддерживаемые COSMOSMotion соединения (см. таблицу №3).
Процедура создания модели механизма является вторым шагом при подготовке исходных данных для выполнения расчета. Процесс создания моделей механизмов предусматривает следующий простой алгоритм:
необходимо указать, какие компоненты сборки SolidWorks будут принимать участие, в движении модели используя функции проводника IntelliMotion;
определить любые дополнительные соединения в проектируемой механической системе путем выделением подходящих зон соединения, используя меню Соединения, открыв диалоговое окно вставки Соединений и выбрать компоненты, которые необходимо закрепить;
Таблица №3
Соединения |
Перемещение |
Вращение |
Суммарное в конструкции |
Поворотные рычаг |
3 |
2 |
5 |
Линейное |
2 |
3 |
5 |
Цилиндрическое |
2 |
2 |
4 |
Сферическое |
3 |
0 |
3 |
Универсальный |
3 |
1 |
4 |
Винтовое |
5 |
5 |
1 |
Планетарный |
1 |
2 |
3 |
Неподвижный |
3 |
3 |
6 |
определить вид движения приводных точек механической системы. Не всем соединениям необходимо назначать движение;
добавить гравитационные силы, задать пружины, демпферы или другие оказывающие воздействие на проектируемый механизм факторы;
запустить моделирование механизма. Щелчком мыши пользователь осуществляет запуск решателя MSC.ADAMS, предназначенного для решения получившихся в результате выполнения вышеуказанных действий системы уравнений.
просмотреть получившиеся результаты. Пользователю предлагается просмотреть анимацию выполненного процесса.
Помимо этого COSMOSMotion позволяет получить численные результаты моделирования для лучшего анализа рассчитанных характеристик проектируемого механизма. Например, COSMOSMotion позволяет получить, например, численные значения нагрузки на каждом соединении и при их движении.
Для анализа кинето-статических параметров в общем случае нет необходимости строить сложную модель главного исполнительного механизма со всеми подробностями, которые иногда во время проектирования и вовсе бывают неизвестными.
Быстрый анализ позволяет выполнить предлагаемая в этой лабораторной работе методика.
Построение схем механизмов необходимо начать с подготовки твердотельных моделей тел, входящих в анализируемый механизм.
В общем виде схему любого механизма можно получить из следующей совокупности тел, описание которых приведено в таблице №4.
На примере создания кривошипно-ползунного механизма рассмотрим методику быстрого создания главных исполнительных механизмов кузнечно-штамповочных машин на основе описанных выше тел.
Таблица №4
Функциональное назначение и описание тел
№ |
Изображение |
Описание |
1 |
|
Представляет собой элемент, закрепленный от перемещения по всем трем плоскостям |
2 |
|
Звено является элементом, которое закрепляется в одной или двух точках и может совершать вращательное движение |

Продолжение таблицы №4
Функциональное назначение и описание тел
№ |
Изображение |
Описание |
3 |
|
Ползун представляет собой элемент, который закрепляется в верхней точке и может совершать поступательное перемещение по одной из осей |

Для начала построения в системе SolidWorks необходимо открыть документ Сборка (рис. 11).
Вставка компонентов начинается по выполнении команды Вставка -> Компонент -> Из файла…, которая открывает окно проводника Вставить компонент… (рис. 12).
Щелкая по кнопке Обзор… в открывшемся диалоге выберете соответствующую модели деталей (рис. 13).
При вставке модели COSMOSMotion выдаст запрос о добавлении нового компонента в соответствующую категорию дерева проводника IntelliMotion (рис. 14).
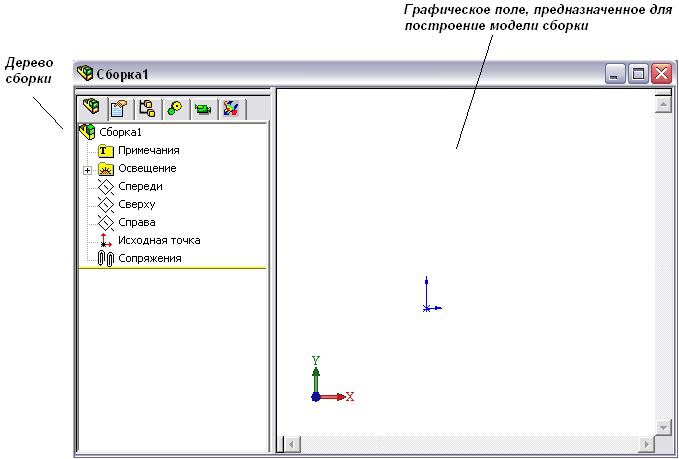
Рис. 11. Вид документ окна Сборки
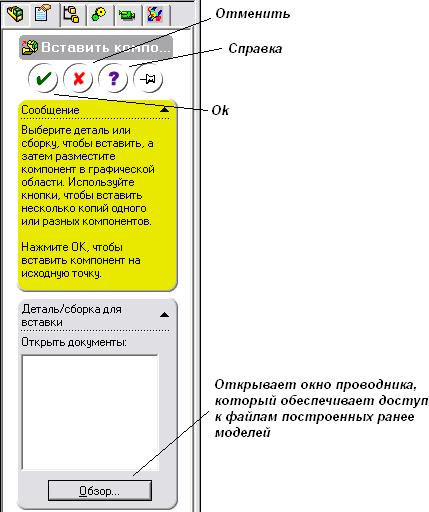
Рис. 12. Диалог проводника Вставить компонент
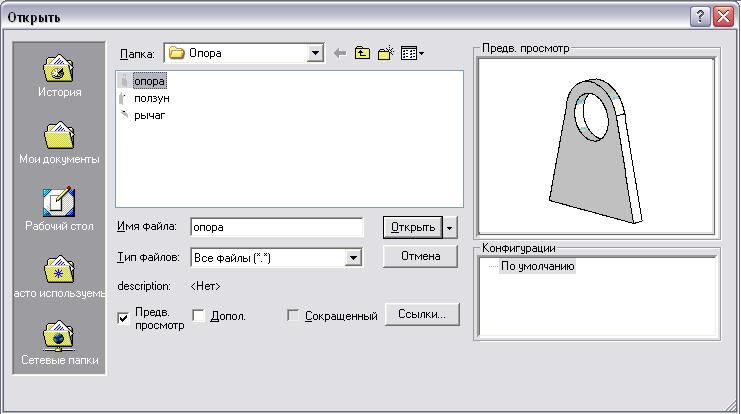
Рис. 13. Окно проводника
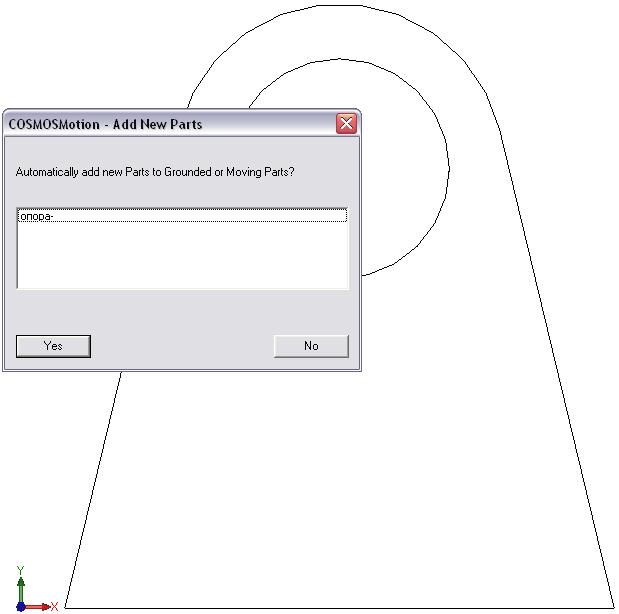
Рис. 14. Диалог COSMOSMotion при вставке модели
в документ сборки SolidWorks
При положительном ответе на этот запрос ссылка на модель будет помещена в соответствующую категорию проводника IntelliMotion. При отрицательном ответе ссылка попадет в категорию Компоненты Сборки, из которой конструктор сможет поместить импортируемый компонент в соответствующую категорию.
Вставляя первый компонент необходимо помнить о том, что SolidWorks автоматически переведет его в состояние «Зафиксированный», которое, однако можно убрать, выбрав компонент в Дереве проекта, щелкнув правой кнопкой мыши и выполнить команду «Освободить».
Выполнив команду «Освободить» необходимо зафиксировать опору самостоятельно, назначив сопряжения по трем плоскостям (рис. 15).

Рис. 15. Вставка модели опоры
После вставки опоры к ней необходимо подставить второе звено, длина которого будет равна длине радиуса кривошипа (см. рис. 16).
Для построения схемы рассматриваемого механизма необходимо добавить еще одну модель звена. Но при этом следует учесть, что добавление модели звена лучше всего выполнять не копированием имеющейся модели, а созданием еще одного файла с моделью такого же вида.
Добавление новой модели осуществляется точно так же, как и всех предыдущих (см. рис. 17).
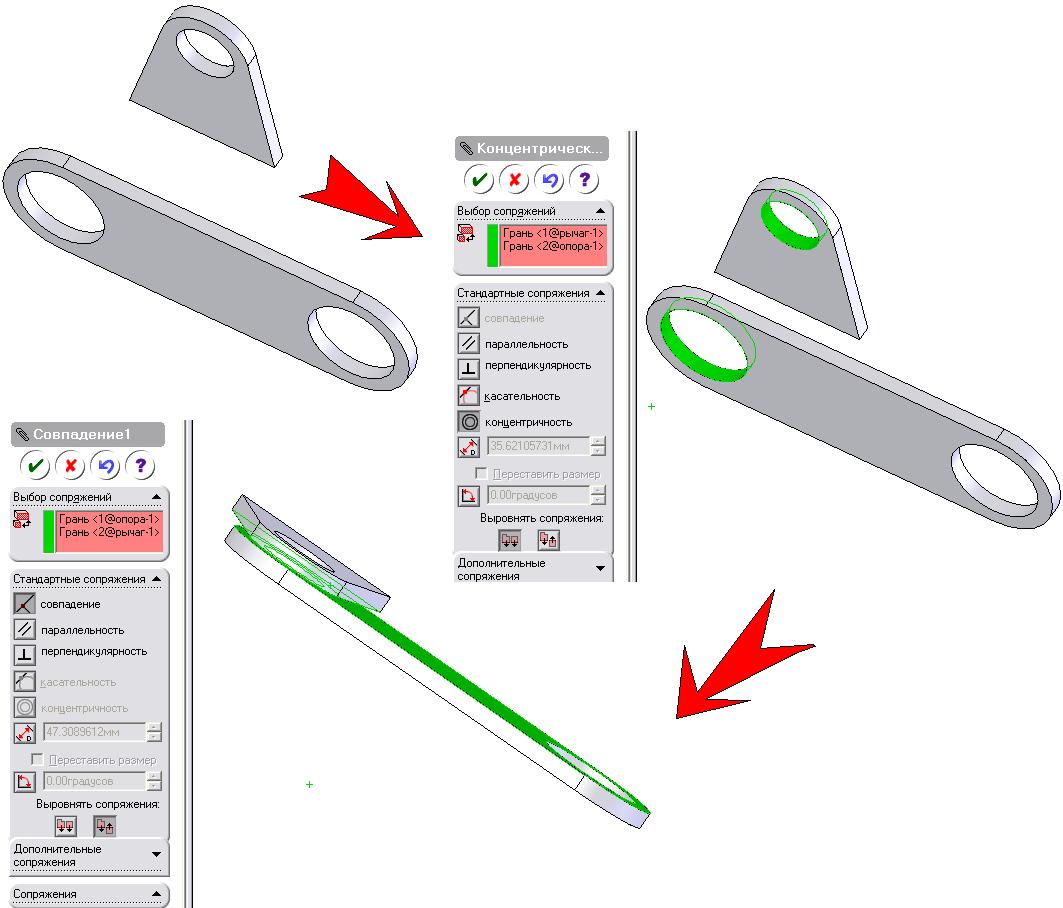
Рис. 16. Установка сопряжений двух компонентов

Рис. 17. Добавление еще одного звена
И к настоящему моменту построенная схема имеет следующий вид (рис. 18).
Для завершения построения схемы кривошипно-ползунного механизма осталось вставить модель ползуна, который должен совершать вертикальные поступательные перемещения. Это осуществляется по алгоритму, показанному на рис. 19.

Рис. 18. Общий вид схемы механизма
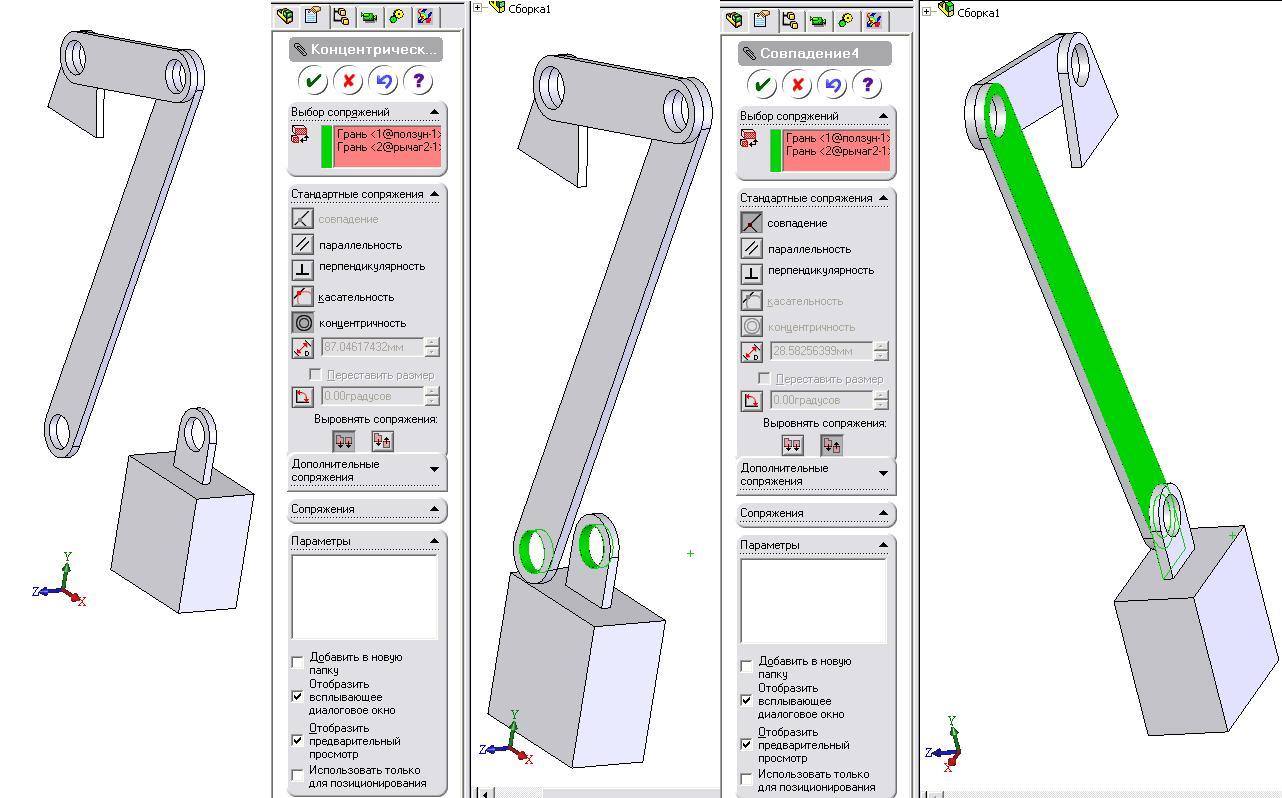

Рис. 19. Установка сопряжений модели ползуна
Подобным образом можно построить любую из существующих схем главных исполнительных механизмов кузнечно-штамповочных машин. Размеры звеньев могут меняться благодаря параметрически заданным моделям SolidWorks перед непосредственным выполнением расчета.
Двойным щелчком по любой из модели открывается группа характеризующих ее размеров. Для изменения размера необходимо выбрать нужный, и дважды щелкнув по нему вызвать диалог изменить (рис. 20).

Рис. 20. Диалог редактирования размеров Изменить