

лаб 2
.docx
|
Министерство науки и высшего образования Российской Федерации Калужский филиал федерального государственного бюджетного образовательного учреждения высшего образования «Московский государственный технический университет имени Н.Э. Баумана (национальный исследовательский университет)» (КФ МГТУ им. Н.Э. Баумана) |

ФАКУЛЬТЕТ |
ИУК «Информатика и управление»____________ |
КАФЕДРА |
ИУК3 «Системы автоматического управления и электротехника»_______ |
лабораторная работа №2
«Преобразование Лапласа. Нахождение оригинала функции по её изображению»
ДИСЦИПЛИНА: «Основы управления в технических системах»
Выполнил: студент гр. ИУК1-51Б |
_______________ (_Прудников А.Ф.) (Подпись) (Ф.И.О.) |
|
_______________ (_Ломакин С.А.__) (Подпись) (Ф.И.О.)
|
Проверил: |
_______________ (Корнюшин Ю.П._) |
(Подпись) (Ф.И.О.)
Дата сдачи (защиты):
Результаты сдачи (защиты):
- Балльная оценка:
- Оценка:
Калуга, 2021 г.
Цель лабораторной работы: формирование практических навыков по использованию преобразования Лапласа для исследования систем управления.
Задача лабораторной работы: освоение свойств преобразования Лапласа, способов вычисления оригинала функции по её изображению, а также применение MATLAB к вычислению оригиналов функций по их изображениям. Закрепить полученные знаний на практике.
Практическая часть
Вариант, № |
Задание 1(2) |
Задание 3(4) |
1 |
|
|


Задание 1
p=[1 3 2]
b=[2 0]
r=roots(p)
r1=r(1); r2=r(2)
dp=polyder(p)
A1=polyval(dp,r1)
A2=polyval(dp,r2)
B1= polyval(b, r1)
C1=B1./A1
B2= polyval(b, r2)
C2=B2./A2
t=[0:0.01:5];
x=C1.*exp(r1.*t)+C2.*exp(r2.*t);
plot(t,x),grid on, xlabel('Time(sec)'), ylabel('x(t)')

Рис. 1. – График функции, построенный с использованием оператора plot(t,x).
Изображению
 соответствует оригинал
соответствует оригинал
 .
.
Проверим правильность преобразований. Для этого воспользуемся предельными теоремами.




Задание 2
p=[1 3 2]
b=[2 0]
r=roots(p)
r1=r(1); r2=r(2)
dp=polyder(p)
A1=polyval(dp,r1)
A2=polyval(dp,r2)
B1= polyval(b, r1)
C1=B1./A1
B2= polyval(b, r2)
C2=B2./A2
C3=C1./(r1)
C4=C2./(r2)
B0=polyval(b,0)
A0=polyval(p,0)
C0=B0./A0
x1=C0+C3.*exp(r1.*t)+C4.*exp(r2.*t);
t=[0:0.01:5];
plot(t,x1), grid on, xlabel('Time(sec)'), ylabel('x1(t)')
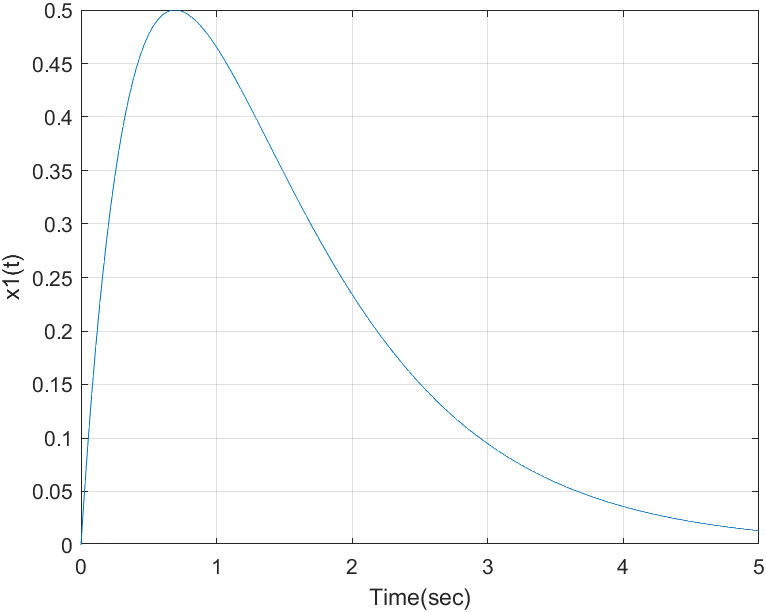
Рис. 2. – График функции, построенный с использованием оператора plot(t,x).
Изображению
 соответствует оригинал
соответствует оригинал
 .
.
Проверим правильность преобразований. Для этого воспользуемся предельными теоремами:



Задание 3
p=[1 2 10]
b=[1 0];
r=roots(p)
r1=r(1)
dp=polyder(p)
A1=polyval(dp, r1)
B1=polyval(b, r1)
C1=B1./A1
t=[0:0.01:5];
Для
формирования функции коэффициент С1
домножаем на

 и
оставляем вещественную часть
и
оставляем вещественную часть

x= exp(-t).*cos(3.*t)-1.6667.*exp(-t).*sin(3.*t);
plot(t,x), grid on, xlabel('Time(sec)'), ylabel('x(t)')
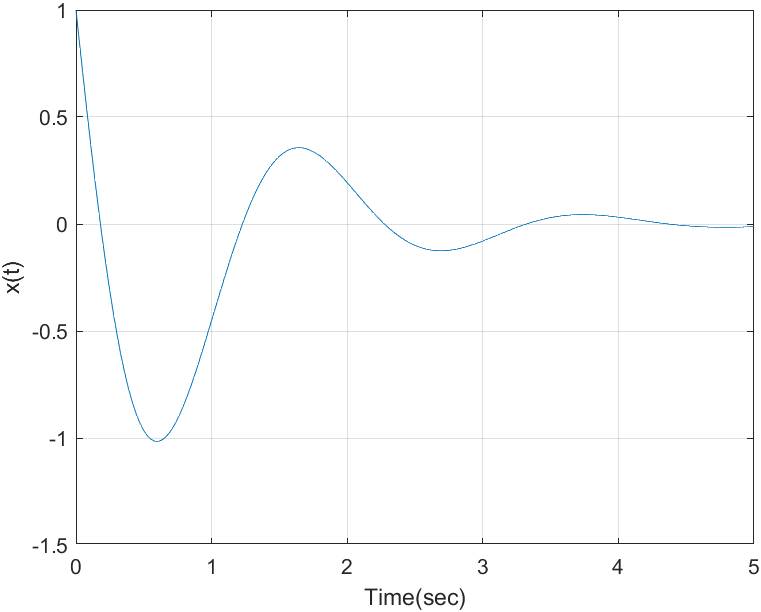
Рис. 3. – График функции, построенный с использованием оператора plot(t,x).
Изображению
 соответствует оригинал
соответствует оригинал
 .
.
Проверим правильность преобразований. Для этого воспользуемся предельными теоремами:




Задание 4
p=[1 2 10]
b=[1 0];
r=roots(p)
r1=r(1)
dp=polyder(p)
A1=polyval(dp, r1)
B1=polyval(b, r1)
C1=B1./A1
C3=C1./r1
A0=polyval(p,0)
B0=polyval(b,0)
C0=B0./A0
t=[0:0.01:5];
Для формирования функции коэффициент С3 домножаем на
Далее оставляем вещественную часть и домножаем на 2.
x=0.33.*exp(-t).*sin(3.*t);
plot(t,x), grid on, xlabel('Time(sec)'), ylabel('x(t)')
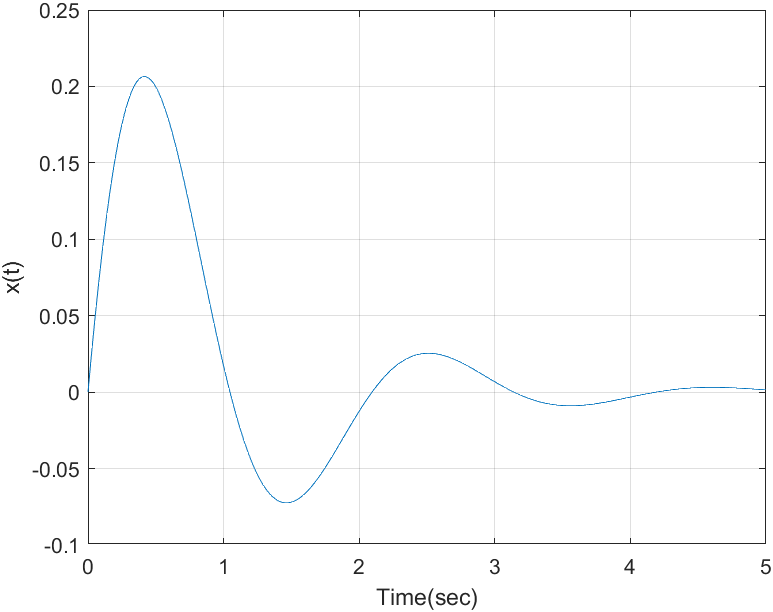
Рис. 4. – График функции, построенный с использованием оператора plot(t,x).
Изображению
 соответствует
оригинал
соответствует
оригинал

 .
.
Проверим правильность преобразований. Для этого воспользуемся предельными теоремами:



Вывод: сформировали практические навыки по использованию преобразования Лапласа для исследования систем управления, а также освоили свойства преобразования Лапласа, способы вычисления оригинала функции по её изображению, а также применение MATLAB к вычислению оригиналов функций по их изображениям. Закрепили полученные знания на практике.