

3 часть дз
.docx
|
Министерство науки и высшего образования Российской Федерации Калужский филиал федерального государственного бюджетного образовательного учреждения высшего образования «Московский государственный технический университет имени Н.Э. Баумана (национальный исследовательский университет)» (КФ МГТУ им. Н.Э. Баумана)
|

ФАКУЛЬТЕТ ИУК «Информатика и управление»____________
КАФЕДРА ИУК3 «Системы автоматического управления _____
_и электротехника»
ДОМАШНЯЯ РАБОТА
«ИССЛЕДОВАНИЕ УСТОЙЧИВОСТИ ЛИНЕЙНЫХ СИСТЕМ
АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ»
ДИСЦИПЛИНА: «Основы управления в технических системах»
Выполнил: студент гр. ИУК1-51Б |
_________________ ( (Подпись) (Ф.И.О.)
|
|
Проверил: |
_________________ (Корнюшин Ю.П.) (Подпись) (Ф.И.О.)
|
|
Дата сдачи (защиты): Результаты сдачи (защиты): |
||
|
- Балльная оценка: - Оценка: |
|
Калуга , 2021
Вариант |
Схема |
Параметры системы |
7 |
Рис. 7. |
|





Рис 1 – общая схема
Найдём передаточную функццию:



Подставим числовые значения


Критерий Гурвица:

 при
при

 при
при
 и при
и при

 при
при
 а также
а также
 ;
;

Таким
образом

Проверим по критерию Михайлова:


Мнимая часть:

Корнями выражения будут
 ;
;
 ;
;
Действительная часть

Корнями выражения будут
 ;
;
 ;
;
 ;
;
Из условия
 ,
получаем что система будет устойчива
при
,
получаем что система будет устойчива
при
2) Построим годограф Михайлова для значения коэффициента передачи разомкнутой системы равного половине его граничных значений


Рис. 2 – Годограф Михайлова для

Из
рисунка видно, что при
 система устойчива.
система устойчива.
3) Построим график переходной функции:
Для
 найдём переходную функцию по второй
теореме разложения.
найдём переходную функцию по второй
теореме разложения.



Корни
знаменателя
 ,
,

Производная:
 ;
;
График переходной функцции системы имеет вид:

Рис. 3 – график переходнной функции для значения коэффициента передачи
Определим
время регулирования. Для этого найдём
 :
:

Вычислим
 .
.
Т.к.
 ,
то
,
то

Время
регулирования
 .
.
Определим
перерегулирования системы:
 .
.
Значение
 найдём по Рис. 4
найдём по Рис. 4

Перерегулирование
системы составляет
 .
.

Рис. 4 – макс значение для h(t)
Найдем
переходную функцию для


Корни знаменателя

Производная:

График переходной функции имеет вид:

Рис. 5 – график переходнной функции для значения коэффициента передачи
Определим время регулирования. Для этого найдём :

Вычислим
 .
.
Т.к.
,
то

Находим
время регулирования согласно Рис. 6
 сек.
сек.
Определим перерегулирования системы: .
Значение
найдём по Рис. 4

Перерегулирование
системы составляет
 .
.

Рис. 6 – время регулирования
4) Определим запас устойчивости по фазе и амплитуде для значения коэффициента передачи разомкнутой системы равного половине его граничных значений.




Рис. 7. – график АФЧХ
Найдём АЧХ данной системы:


Рис. 8 – график АЧХ
Найдем ФЧХ данной системы:


Рис. 9 – график ФЧХ
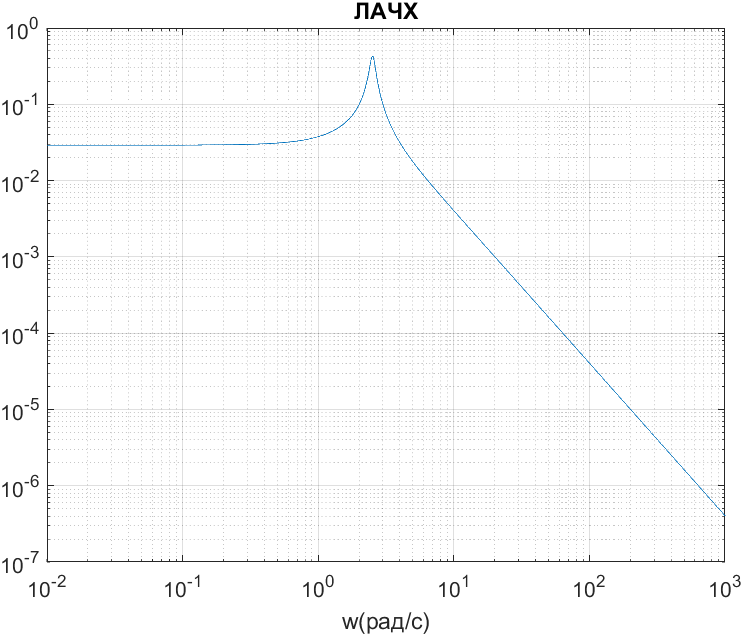
Рис. 10 – лачх

Рис. 11 – ЛФЧХ
5) Построим траектории движения полюсов передаточной функции системы при изменении коэффициента передачи разомкнутой системы.
6) Определим приемлемое значение коэффициента передачи К, при котором перерегулирование не превосходит 41%.


Рис.12 - График h(t)
при

Выводы
При увеличении коэффициента передачи К прямой цепи колебательность системы уменьшается и увеличивается быстродействие замкнутой системы.
Литература
1. Первозванский А.А. Курс теории автоматического управления: учеб. пособие / А.А. Первозванский. - М.: Издательство Лань, 2010. — 624 с.
2. Гайдук, А.Р. Теория автоматического управления в примерах и задачах с решениями в MATLAB: учеб. пособие / А.Р. Гайдук В.Е., Беляев Т.А., Пьявченко - Изд-во "Лань", 2011. - 46 с. – URL: https://e.lanbook.com/book/2033#authors
3. Первозванский, А.А. Курс теории автоматического управления : учеб. пособие / А.А. Первозванский. - Изд-во "Лань", 2015. - 624 с. – URL: https://e.lanbook.com/book/65054#authors
4. Фомичев, А.Н. Исследование систем управления (2-е издание) [Электронный ресурс]: учебник для бакалавров / А.Н. Фомичев — Электрон. текстовые данные.— М.: Дашков и К, 2015.— 348 c.— Режим доступа: URL: http://www.iprbookshop.ru/24787.