

лаб 1
.docx
|
Министерство науки и высшего образования Российской Федерации Калужский филиал федерального государственного бюджетного образовательного учреждения высшего образования «Московский государственный технический университет имени Н.Э. Баумана (национальный исследовательский университет)» (КФ МГТУ им. Н.Э. Баумана) |

ФАКУЛЬТЕТ |
ИУК «Информатика и управление»____________ |
КАФЕДРА |
ИУК3 «Системы автоматического управления и электротехника»_______ |
лабораторная работа №1
«Математические модели линейных стационарных систем управления»
ДИСЦИПЛИНА: «Основы управления в технических системах»
Выполнил: студент гр. ИУК1-51Б |
_______________ (_Прудников А.Ф.) (Подпись) (Ф.И.О.) |
|
_______________ (_Ломакин С.А.__) (Подпись) (Ф.И.О.)
|
Проверил: |
_______________ (Корнюшин Ю.П._) |
(Подпись) (Ф.И.О.)
Дата сдачи (защиты):
Результаты сдачи (защиты):
- Балльная оценка:
- Оценка:
Калуга, 2021 г.
Цель лабораторной работы: формирование практических навыков по математическому описанию линейных объектов и систем управления.
Задача лабораторной работы: освоение основные приёмы моделирования систем управления в среде Simulink. В ходе лабораторной работы выполняются моделирование простейших систем управления (элементарных звеньев).
Практическая Часть
Эксперимент 1

Рис.1. – Пропорциональное звено.
При увеличении значения gain выходной сигнал увеличивается
Эксперимент 2

Рис.2. –Интегрирующее звено.
При увеличении значения интегратора изменяется скорость увеличения выходного сигнала со временем. При большем значении скорость падает

Рис.3. – Интегрирующее звено с использованием блока Transfer Fcn.
При увеличении коэффициента перед s замедляется скорость роста выходного напряжения по времени. Зависимость выходного сигнала от свободного члена в знаменателе обратно-пропорциональная.
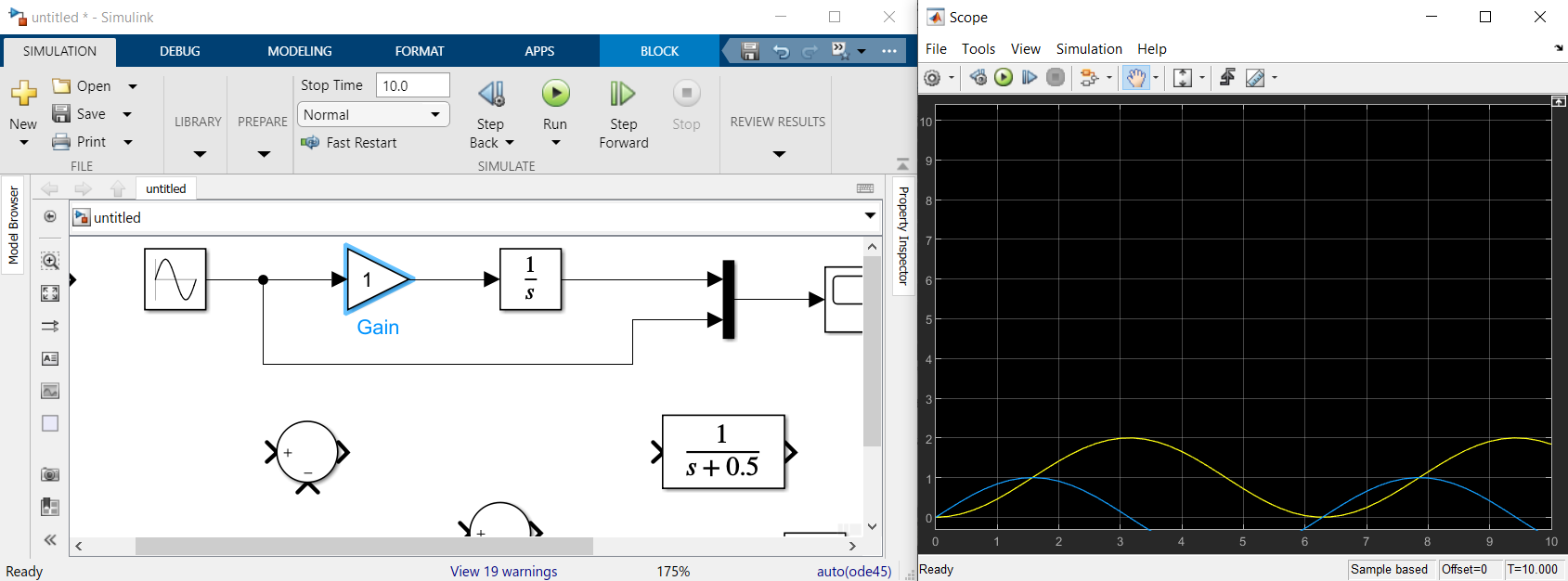
Рис.4. –Интегрирующее звено с синусоидальным источником.
Интегратор меняет фазу сигнала, а также изменяет диапазон частот.
Эксперимент 3

Рис.5. – Апериодическое звено.
Выходной
сигнал прямо пропорционально зависит
от
 – изменяется конечная величина. При
изменении
– изменяется конечная величина. При
изменении
 – меняется скорость изменения выходного
сигнала.
– меняется скорость изменения выходного
сигнала.

Рис.6. – Апериодическое звено с оператором Transfer Fcn.
Эксперимент 4

Рис.7. – Интегрирующее звено второго порядка.
График
изменения выходного сигнала проходит
через точку
 .
При увеличении
скорость увеличения выходного сигнала
по времени растет.
.
При увеличении
скорость увеличения выходного сигнала
по времени растет.

Рис.8. – Интегрирующее звено второго порядка с оператором Transfer Fcn.
Эксперимент 5

Рис.9. – Консервативное звено.
При увеличении мы увеличиваем амплитуду выходного сигнала. При увеличении мы увеличиваем частоту выходного сигнала.

Рис.10. – Консервативное звено с оператором Transfer Fcn.
Эксперимент 6

Рис.11. – Колебательное звено.
При изменении значения самого левого оператора gain выходной сигнал начинает стремиться к указанному значению. При изменении изменяется время колебаний прямо пропорционально. влияет делит на себя входной сигнал.

Рис.12. – Колебательное звено с оператором Transfer Fcn.
Причина затухания заключается в том, что во всякой колебательной системе, кроме возвращающей силы, всегда действуют разного рода силы трения, сопротивление воздуха, и т. п., которые тормозят движение. В нашем случае затухание происходит из-за оператора sum.
Эксперимент 7

Рис.13. – Дифференцирующее звено.
Выходной сигнал соответствует значению . При увеличении коэффициента уменьшается время затухания.
Вывод: сформировали практические навыки по математическому описанию линейных объектов и систем управления, а также освоили основные приёмы моделирования систем управления в среде Simulink. В ходе лабораторной работы выполнили моделирование простейших систем управления (элементарных звеньев).