

Sb95706
.pdfКурс объекта равен углу q, снимаемому с ДУ3 (рис. 3.6), а углы качек к
и ψ равны сигналам с ДУ1 и ДУ2. Для сохранения ГСП географической ориентации на ДМ гироскопов необходимо подавать управляющие воздействия, пропорциональные угловым скоростям вращения географического трехгранника:
|
u |
|
N |
/ R ; |
|
y |
u |
cos |
E |
/ R ; |
|
x |
|
|
2 |
|
|
|
1 |
|
|||
z u sin E tg / R1. |
|
|
|
||||||||
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Выражения (3.7) можно представить в виде:
x ; |
y ( )cos ; |
z ( )sin . |
Путевой угол вычисляют по формуле
C arctg( E / N ).
(3.7)
(3.8)
(3.9)
Выражения (3.2) (3.9) определяют алгоритм работы ПА ИНС с географической ориентацией осей.
Для правильного функционирования системы необходимо перед началом работы ввести в ВУ N (0); E (0); 0; 0 и ориентировать СП таким обра-
зом, чтобы оси х, у, z, совпали с осями ξ, η, ζ.
На рис. 3.7 показана структурная схема ПА ИНС с географической ориентацией осей. Гироориентатор изображен условно в виде трехгранника, для вращения которого вокруг каждой из осей подается сигнал, пропорциональный требуемой угловой скорости.
x
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
N (0) |
N |
|
|
|
|
|
|
(0) |
|
|
|
|
ay |
N |
|
1 |
|
|
|||||||
|
z |
|
N |
|
|
|
|
|
|||||||
|
Ay |
|
|
|
|
|
|
|
R2 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
БВ |
|
БВ |
|
|
|
|
|
БВ ω |
|
x |
|
Ax |
a |
x |
|
|
|
|
1 |
|
|
|
|
||
|
|
|
|
|
|
||||||||||
|
|
|
|
E |
E |
|
|
|
|
|
|||||
|
|
q К |
|
|
|
|
E |
R1cos |
|
|
|
|
|||
|
|
|
(0) |
|
|
|
|
|
|
(0) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
E |
|
|
|
|
|
|
|
|
|
Рис. 3.7. Структурная схема ПА ИНС с географической ориентацией осей:
БВ – блок выработки
41
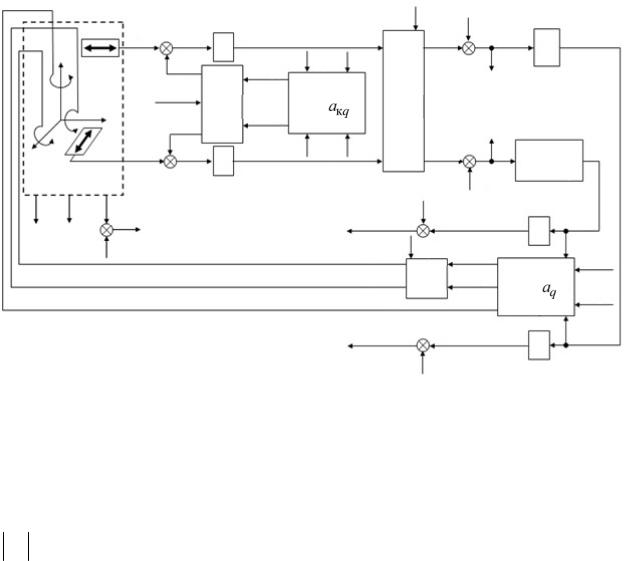
ПАИНСсквазигеографическойориентациейосей. Работа ПА ИНС вква-
зикоординатах принципиально не отличается от работы в географических координатах. Трехгранник хуz, связанный с СП, в этом случае моделирует квазигеографический трехгранник q q q . Как и ранее, сигналы акселерометров
пропорциональны проекциям кажущегося ускорения объектов на оси х и у:
ax a q ; ay a q , где a q и a q |
определяются выражениями: |
|
|||||||||||||||||||
a |
|
Eq |
|
2 |
Nq |
cos |
q |
cos |
|
Eq |
|
Nq |
tg / R; |
|
|||||||
q |
|
|
|
|
|
|
|
q |
|
|
|
|
|||||||||
a q Nq 2 Eq cos q cos q 2Eqtg q / R; |
|
||||||||||||||||||||
|
|||||||||||||||||||||
a |
2 |
|
sin |
|
2 |
|
|
cos |
|
sin |
|
|
|
|
|||||||
N |
q |
E |
q |
|
2 / R g. |
||||||||||||||||
q |
|
|
|
|
|
|
|
|
|
|
|
q |
|
|
|
||||||
Компенсируемые составляющие ускорения в данном случае:
a |
2 |
Nq |
cos |
q |
cos |
|
Nq |
|
Eq |
tg / R |
; |
|
|||||
к q |
|
|
|
|
q |
|
|
|
|
q 2 |
|
(3.10) |
|||||
a |
2 |
|
|
cos |
|
|
cos |
|
2 |
|
tg |
/ R. |
|
||||
Eq |
q |
|
|
|
|
||||||||||||
к q |
|
|
|
|
q |
|
Eq |
|
q |
|
|
|
|||||
На входы первых интеграторов подают сигналы:
aп q a q aк q Eq; |
aп q a q aк q Nq. |
(3.11) |
Составляющие скорости и координаты местоположения вычисляют, как и ранее:
|
|
t |
|
t |
|
|
|
|
||
Nq Nq (0) aп qdt Nq (0) Nqdt; |
|
|
||||||||
|
|
0 |
|
0 |
|
|
|
|
||
|
|
t |
|
t |
|
|
|
|
||
|
|
|
|
|
|
|
||||
Eq Eq (0) aп qdt Eq (0) Eqdt; |
(3.12) |
|||||||||
|
||||||||||
|
|
0 |
|
0 |
|
|
|
|
|
|
|
1 t |
|
1 t |
Eq |
|
|
||||
|
|
|
|
|||||||
q q0 |
|
aNqdt; |
q q0 |
|
|
|
|
dt. |
|
|
R |
R |
|
|
|||||||
|
0 |
|
0cos q |
|
|
|||||
Квазикурс Кq снимается с ДУ3, а углы качек с ДУ1 и ДУ2 (см. рис. 3.6). ДлясохраненияСПквазигеографическойориентациинаДМгироскоповнеобходимо подавать сигналы:
xq u q ; |
yq u q ; |
zq u q. |
(3.13) |
Выражения (3.10) (3.13) определяют алгоритмы работы ПА ИНС в квазигеографической системе координат.
42
|
|
|
a |
|
y |
|
y |
|
|
Nq |
1 |
|
|
||||
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|||
|
z Ay |
|
aкy |
|
aк q |
q |
q |
|
Nq |
|
|
R |
|
||||
|
|
|
|
Aq0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
ПК1 |
a |
|
ВБ |
|
|
|
|
|
|
|
|
|
|
|
|
|
aкx |
|
|
к q |
|
|
|
Eq |
|
|
|
|
|
|
|
|
Ax ax |
|
|
|
|
|
|
|
|
|
|
|
|
|||
x |
|
|
|
|
|
|
Nq |
Eq |
Eq |
1 |
q |
||||||
|
x |
x |
|
Rcos q |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
q(0) |
Eq(0) |
|
|
|||||||
|
|
q |
К |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
q |
|
|
|
|
|
|
||||||
|
|
Aq0 |
|
|
|
|
|
x |
Aq0 |
a q |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
q |
||||
|
|
|
|
|
|
|
|
|
|
y |
ПК3 |
a q |
ВБ |
q |
|||
|
|
|
|
|
|
|
|
|
z a q |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
q |
|
|
|
|
|
q |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
q(0)
Рис. 3.8. Структурная схема ПА ИНС с квазигеографической ориентацией осей
Структурная схема алгоритмовИНС,работающейв квазигеографической системе, представлена на рис. 3.8 и аналогична схеме ИНС на рис. 3.7. Разница состоит в отсутствии блоков выработки R1 и R2 (в полярных районах при
q 10 можно считать R1 R2 b , поскольку погрешность определения
скорости за счет этого допущения не превышает 3 10–3 уз), а также в том, что для вычисления компенсирующих ускорений и угловых скоростей коррекции СП наряду с квазиширотой необходима и квазидолгота (рис. 3.8).
При сравнении (3.2) и (3.10) для компенсирующих ускорений и (3.7), (3.13) для угловых скоростей видны преимущества ИНС, работающей в квази-
координатах в полярном районе при |
|
tg |
|
0,17, когда |
|
|
q |
|
10 (в географи- |
|
|
|
|
||||||
|
|
q |
|
|
|
|
|
|
ческих координатах при 80 ; 5,7 tg ).
3.5.Влияние типа объекта, времени работы
итребований по точности на выбор типа ИНС
Рассмотренныетипы ИНС существенно различаются по условиямработы ЧЭ, по степени сложности СП, по требованиям, предъявляемым к вычисли-
тельным устройствам.
43
ВПА ИНС гироскопы ориентированы неизменно по отношению к вектору силы тяжести, для чего на их датчики момента поступают соответствующие сигналы. Точность выработки выходных параметров в ПА ИНС существенно зависит от характеристик схемы управления гироскопами.
ВИНС ГТ, ИНС AT и БИНС гироскопы работают в неуправляемом режиме, что дает более высокую точность. Однако в этих ИНС гироскопы меняют свою ориентацию по отношению к вектору силы тяжести, что служит источником дополнительных погрешностей. Наиболее тяжелые условия для работы гироскопов возникают в БИНС. Здесь ротор гироскопа может отклоняться от корпуса на большие углы, в результате чего возникают вредные моменты.
Следует отметить, что в ИНС ГТ оба интегратора включены в замкнутый контур построителя вертикали, а в ПА ИНС второй интегратор не охвачен обратной связью, что приводит к погрешностям вторичного интегрирования, нарастающим во времени.
Акселерометры в ПА ИНС и ИНС ГТ работают в благоприятных условиях, поскольку их оси чувствительности практически перпендикулярны вектору силы тяжести и на них проектируются только горизонтальные составляющие ускорений объекта, существенно меньшие ускорения свободного падения g. В ИНС AT и БИНС диапазон измеряемых ускорений, как правило, в 5…10 раз больше, чем в ИНС других типов.
Типы ИНС |
|
Достоинства |
|
Недостатки |
|
|
|
Ориентация гироскопов неиз- |
Точность зависит от ха- |
||
|
|
менна по отношению к вектору |
рактеристик системы |
||
ИНС ПА |
|
силы тяжести |
управления гироско- |
||
Благоприят- |
|
|
пами; |
||
|
ные условия |
|
|
Второй интегратор не |
|
|
для работы |
|
|
охвачен обратной свя- |
|
|
акселеромет- |
|
|
зью |
|
ИНС ГТ |
ров |
Оба интегратора |
|
6, 7 осей карданова |
|
|
|
||||
|
охвачены обрат- |
|
|||
|
|
подвеса |
|||
|
|
ной связью |
Гироскопы |
||
|
|
|
|||
|
|
|
работают в |
|
|
ИНС АТ |
|
|
неуправляе- |
4, 5 осей карданова |
|
Диапазон измерения ускорений в |
мом режиме |
подвеса |
|||
|
|||||
|
|
Наиболее тяжелые |
|||
|
5…10 раз больше |
|
|||
БИНС |
|
условия эксплуатации |
|||
|
|
|
|||
|
|
|
|
для ЧЭ |
|
|
44 |
|
|
||
СтепеньсложностиСПИНСхарактеризуетсячисломосейкардановаподвеса (ИНС ГТ шесть-семь; ИНС AT четыре-пять; ПА ИНС три-четыре; БИНС ноль), т. е. наиболее сложной по кинематике и наиболее громоздкой будет ИНС ГТ, а наиболее простой БИНС.
Таким образом, учитывая выше описанное, достоинства и недостатки ИНС различного типа можно свести в таблицу.
ЗАКЛЮЧЕНИЕ
Составление уравнений движения объекта базируется на основных теоремах кинематики и динамики твердого тела. В данном учебном пособии различные методы составления и решение дифференциальных уравнений движения рассмотрены на примере трехстепенного астатического гироскопа. Гироскопические устройства входят в состав инерциальных навигационных систем, принцип работы которых заключается в определении углового положения и координат объекта. При этом разнообразие объектов, различие их траекторий, параметров и времени движения определяют особенности ИНС как при теоретических расчетах, так и при их технической реализации.
45
Список литературы
1.Тарг С. М. Краткий курс теоретической механики: учеб. для втузов. М.:
Высш. шк., 2001.
2.Яблонский А. А. Курс теоретической механики: учеб. пособие: в 2 ч.: Динамика. 3-е изд., испр. и доп. М.: Высш. шк., 1966.
3.Лурье А. И. Аналитическая механика. М.: Наука, 1976.
4.Бранец В. Н., Шмыглевский И. П. Применение кватернионов в задачах ориентации твердого тела. М.: Наука, 1973.
5.Давыдов В. Б., Торопов Ю. А. Практикум по дисциплине «Приборы навигации и ориентации» / ЭТИ. СПб., 1992.
6.Каргу Л. И. Гироскопические приборы и системы. Л.: Судостроение,
1988.
7.Горенштейн И. А., Шульман И. А. Инерциальные навигационные системы. М.: Машиностроение, 1970.
8.Бромберг П. В. Теория инерциальных систем навигации. М.: Наука,
1979.
9.Лукьянов Д. П., Распопов В. Я., Филатов Ю. В. Основы теории гироскопов / ГНЦ РФ ОАО «Концерн «ЦНИИ «Электроприбор». СПб., 2015.
10.Инерциальные навигационные системы морских объектов / Д. П. Лукьянов, А. В. Мочалов, А. А. Одинцов, И. Б. Вайсгант. Л.: Судостроение, 1989.
46
Оглавление |
|
ВВЕДЕНИЕ.............................................................................................................. |
3 |
1. ПОЛУЧЕНИЕ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ ДВИЖЕНИЯ |
|
МЕХАНИЧЕСКИХ СИСТЕМ .......................................................................... |
4 |
1.1. Основное уравнение динамики и динамические уравнения Эйлера...... |
4 |
1.2. Принцип Германа–Эйлера–Даламбера...................................................... |
6 |
1.3. Уравнение Лагранжа второго рода........................................................... |
10 |
2. МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ГИРОСКОПИЧЕСКОГО ПРИБОРА..... |
11 |
2.1. Использование динамических уравнений Эйлера для получения |
|
математической модели ТАГ........................................................................... |
11 |
2.2. Использование принципа Германа–Эйлера–Даламбера |
|
для получения математической модели ТАГ................................................. |
23 |
2.3. Использование уравнений Лагранжа второго рода для получения мате- |
|
матической модели ТАГ…...................................................................................23 |
|
2.4 Анализ уравнений движения...................................................................... |
27 |
3. ИСПОЛЬЗОВАНИЕ ГИРОСКОПИЧЕСКИХ ПРИБОРОВ В СИСТЕМАХ |
|
АВТОНОМНОЙ НАВИГАЦИИ И УПРАВЛЕНИЯ......................................... |
32 |
3.1. Назначение, состав и классификация инерциальных навигационных |
|
систем................................................................................................................. |
32 |
3.2. Классификация ИНС по способу ориентации измерительных осей |
|
инерциальных датчиков.................................................................................... |
33 |
3.3. Принципиальные схемы ИНС различных типов.................................... |
34 |
3.4. Полуаналитические ИНС .......................................................................... |
38 |
3.5. Влияние типа объекта, времени работы и требований по точности |
|
на выбор типа ИНС........................................................................................... |
44 |
Список литературы ............................................................................................... |
46 |
47
Боронахин Александр Михайлович Подгорная Людмила Николаевна Ткаченко Анна Николаевна Шалымов Роман Вадимович
Разработка и анализ математической модели гироскопического прибора для систем автономной навигации и управления
Учебное пособие
Редактор Н. Ю. Меньшенина
———————————————————————————
Подписано в печать 03.11.17. Формат 60×84 1/16. Бумага офсетная. Печать цифровая. Печ. л. 3,0.
Гарнитура «Times New Roman». Тираж 78 экз. Заказ 134.
———————————————————————————
Издательство СПбГЭТУ «ЛЭТИ» 197376, С.-Петербург, ул. Проф. Попова, 5
48