

Sb95706
.pdfпо способу построения вертикали места с аналитической или расчетной вертикалью, с инерциальным построителем вертикали;
по наличию стабилизированной платформы (СП) – со стабилизированной гироскопической или астроплатформой, бесплатформенные и др.
Всостав любой ИНС входит блок ЧЭ (акселерометров и гироскопов) и вычислитель, в котором реализуется навигационный алгоритм. Важным элементом платформенных ИНС является СП, которая выполняет две основные функции:
обеспечивает независимость угловой ориентации инерциальных чувствительных элементов ИНС от угловых движений объекта и от действующих на платформу возмущающих моментов;
используя информацию от ЧЭ, преобразованную вычислительным устройством, обеспечивает изменяющуюся по заданному закону угло-
вую ориентацию блока ЧЭ.
СП разделяются по области применения, принципу действия, кинематической схеме, используемым чувствительным элементам и другим признакам. По кинематической схеме различают платформы одноосные, двухосные, трехосные и многоосные. По принципу действия СП, применяемые в ИНС, могут быть силовыми, индикаторно-силовыми и индикаторными.
Вплатформах силового типа обязательно наличие гироскопов, гироскопические моменты которых достаточно велики по сравнению с другими моментами, действующими по осям подвеса (возмущающими, моментами сил инерции и др.). Гироскопический момент в этом случае непосредственно противодействует возмущающим моментам, а момент стабилизирующего двигателя осуществляет межрамочную коррекцию, ликвидируя последствия действия возмущающих моментов (отклонение в ходе прецессии вектора кинетического момента гироскопа от нормали к рамке его подвеса).
Вплатформах индикаторного типа возмущающим моментам противо-
действует только момент, развиваемый стабилизирующим двигателем. Гироскопы в данном случае будут лишь индикаторами изменения углового положения платформы.
Промежуточное место занимают индикаторно-силовые платформы. Их могут выполнять, например, на малых гироскопах с двумя степенями свободы или на поплавковых интегрирующих гироскопах. В таких СП возмущающим моментам противодействуют в основном стабилизирующие двигатели.
31
3.2. Классификация ИНС по способу ориентации измерительных осей инерциальных датчиков
Наибольшее распространение получила классификация ИНС по принципу пространственной ориентации измерительных осей ЧЭ. Свяжем с каждой группой датчиков базовые трехгранники: xayaza с акселерометрами и
xгyгzг с гироскопами. Рассмотрим характерные случаи вращения этих трех-
гранников:
базовые трехгранники являются инерциальными, т. е. не вращаются от-
носительно инерциальной системы координат ( a 0, |
г 0, где |
a, г векторы абсолютной угловой скорости вращения соответству- |
|
ющих трехгранников); |
|
базовые трехгранники вращаются таким образом, что одна из их осей
|
непрерывно совмещается с направлением вертикали |
|
места |
|
|
a , |
г , где вектор абсолютной угловой скорости враще- |
||
|
ния горизонтного трехгранника); |
|
|
|
|
базовыетрехгранникивращаютсявместесобъектом a к, |
г к , |
||
|
где к |
вектор абсолютной угловой скорости трехгранника, |
жестко |
|
|
связанного с подвижным объектом, например с кораблем). |
|
|
|
|
С учетом возможности независимого вращения каждого из базовых трех- |
|||
гранников можно получить девять вариантов построения ИНС [7]. Однако на практике используют ИНС четырех типов: полуаналитического, геометрического, аналитического и бесплатформенного.
Рассмотрим принцип действия каждого из этих типов ИНС на примерах одномерных схем. При этом будем считать, что объект движется по дуге большого круга невращающейся Земли и определяется только одна координата, равная длине дуги пройденного пути (одномерная ИНС).
3.3. Принципиальные схемы ИНС различных типов
Пространственная ИНС любого типа состоит из гироориентатора, в состав которого входит СП с блоками ЧЭ, и вычислительного устройства. С помощью гироориентатора моделируется инерциальный или горизонтный трехгранник и измеряются ускорения, воздействующие на объект в точке установки гироориентатора. В вычислительном устройстве по сигналам акселерометров и датчиков углов, расположенных в гироориентаторе, вырабатываются
32

все необходимые навигационные элементы: координаты φ и λ, составляющие скорости N , E , курс К, а иногда и углы качки к, .
Углы эти определяют следующим образом (рис. 3.1). Введем трехгранник xкyкzк, жестко связанный с объектом (корабль). Ось xк совпадает с поперечной осью объекта и направлена к правому
борту,ось yк совпадаетс продольнойосьюобъ- |
|
z1 |
|
|
|
|
zк к |
|
|
|
|
екта и направлена к носу, ось zк перпендику- |
|
|
|
||
|
|
|
|
|
|
лярна плоскости палубы и направлена вверх. |
|
|
|
|
|
Угол К курс объекта отсчитывают в го- |
|
|
|
|
|
ризонтальной плоскости от оси по часо- |
x |
|
|
yк |
|
вой стрелке до проекции продольной оси объ- |
1 |
К |
О |
||
|
|||||
екта на эту плоскость. Диапазон изменения |
x к |
|
К |
||
к |
|
|
|||
курса 0...3600. |
|
|
|
||
|
|
|
|||
|
|
|
y1 |
||
Угол дифферента ψ отсчитывают в верти- |
|
|
|
||
|
Рис. 3.1. Углы качки и |
|
|||
кальной плоскости между осью yк и ее проек- |
|
|
|||
|
курса объекта |
|
|
||
цией на горизонтальную плоскость.
Угол крена к отсчитывают в поперечной плоскости (плоскости шпангоута) между осью xк и линией пересечения указанной плоскости с плоскостью горизонта. Положительными считаются значения ψ при дифференте на корму, а к – при крене на правый борт.
Полуаналитическая ИНС (ПА ИНС). В полуаналитической ИНС оси базовых трехгранников параллельны, причем на датчики момента гироскопов подают такие сигналы, чтобы одна из осей (za, z ) непрерывно совмещалась с
направлением местной вертикали, т. е. a г (рис. 3.2).
Гироскопы помимо функций стабилизации выполняют еще роль интегрирующих элементов. Своим названием ПА ИНС обязана тому, что вертикаль здесь моделируется физически с помощью СП, а необходимые для этого угловые скорости разворота платформы рассчитывают аналитически. Подробнее алгоритм работы ПА ИНС будет рассмотрен в 3.4.
33
|
z z |
|
|
|
|
|
Г |
ДМ |
|
|
|
|
|
ДУГ |
|
|
|
|
|
|
|
А |
|
ax |
|
1 |
|
|
|
x |
|
|
|
|
|
|
|
R |
|||
СД |
ДУ |
|
|
|
|
x |
x |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 3.2. ПА ИНС: |
|
ДУГ – датчик угла; СД стабилизирующий двигатель; |
|
ДМ – датчик момента; ДУ – датчик угла СП |
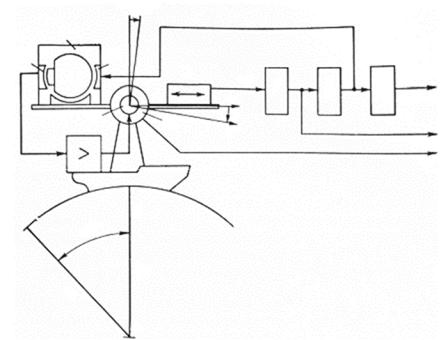
ИНС геометрического типа (ИНС ГТ). В подобных ИНС базовый трех- |
|
гранник |
xгyгzг неподвижен в инерциальном пространстве, а трехгранник |
xayaza |
вращается таким образом, что ось za непрерывно совмещается с |
направлением местной вертикали, т. е. a , г 0.
Платформа П1 (рис. 3.3), на которой установлен гироскоп Г с датчиком угла ДУГ, может поворачиваться относительно оси, перпендикулярной плоскости рисунка, с помощью двигателя Д1, управляемого от вычислительного устройства ВУ.
Платформа П1 и акселерометр А установлены на платформе П2. Контур стабилизации состоит из ДУГ, усилителя и двигателя Д2. Схема ВУ не отличается от схемы рис. 3.2. Как и в ПА ИНС, сигнал акселерометра, установленного на платформе П2, стабилизированной по сигналам ДУГ в горизонте, дважды интегрируется и масштабируется. Полученное значение ∆φ отрабатывается с помощью Д1 и датчика угла платформы ДУ1. Такимобразом,отличиеот ПАИНСсостоитвспособевведениянастабилизаторобратнойсвязи.Навигационные параметры ∆φ, и ψ получаются так же, как и в ПА ИНС.
34

zг |
Г |
yг |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
ДУГ |
ДУ1 |
zа |
|
|
|
ВУ |
|
|
|
|
|
|
|||
П1 |
Д1 |
ДУ2 |
А |
yа |
|
1 |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
R |
|||
П2 |
Д2 |
|
|
|
|
|
|
|
|
|
|
|
|||
R
Рис. 3.3. ИНС ГТ
Название ИНС ГТ связано с тем, что и направление, независимое относительно инерциального пространства, и направление местной вертикали строят в этом случае физически.
ИНС аналитического типа (ИНС AT). В этих ИНС (рис. 3.4) оба базовых трехгранника совпадают и не вращаются в инерциальном пространстве, т. е.
a г 0.
ВУ
|
|
y |
a1 ПК aг |
|
1 |
|
|
|
|
zа |
|
|
|
||||
|
а |
a |
|
|
R |
|
|
|
|
А2 |
|
2 |
|
|
|
|
|
|
|
А1 |
|
|
|
|
|
|
Г |
ДУ |
|
|
|
|
|
||
|
|
|
|
|
||||
|
|
|
|
|
|
|
||
zг |
|
Д |
|
( ) |
|
|
|
|
ДУГ |
yг |
|
|
|
|
|
|
|
R
т
н
Рис. 3.4. ИНС АТ
На платформе установлены те же элементы, что и в предыдущем случае. По сравнению с предшествующими схемами в ВУ введены два новых блока –
35

преобразователь координат ПК и сумматор. Обратная связь по ∆φ замыкается в ПК.
При движении объекта из точки н , в которой платформа была установлена горизонтально, в точку т сигналы акселерометров А1 и А2 (a1 и a2) перепроектируютсявПКчерезтекущийугол вгоризонтальнуюплоскость. Операции с горизонтальной составляющей ускорения aг не отличаются от
рассмотренныхранее.Такимобразом,вданномслучаенаправлениевертикали рассчитывается аналитически,откуда иназвание ИНС AT.Навигационныепараметры и вычисляются, как и ранее, угол килевой качки ψ получается на выходе сумматора как разность значения угла, полученного с ДУ, и координаты .
БесплатформенныеИНС(БИНС). В БИНС базовые трехгранники жестко связаны с объектом, т. е. a г к. Проекции абсолютной угловой скоро-
сти трехгранника на его оси можно измерить, например, тремя гироскопическими измерителями абсолютной угловой скорости. Во многих случаях ориентацию опорного трехгранника целесообразно определять с помощью неуправляемых трехстепенных гироскопов. Схема одномерной БИНС показана на рис. 3.5.
|
|
|
|
|
|
|
|
ДУГ zг |
|
|
a2 |
|
|
|
( ) |
Г |
|
|
|
|
|
||
А1 zа |
|
|
|
|
|
|
|
А2 |
y |
a |
|
1 |
|
|
|
|
а |
ПК г |
|
|
|
|
|
|
R |
|
|||||
|
yг |
|
a1 |
|
|
|
|
|
|
|
|
|
|
ВУ |
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
т |
|
|
|
|
|
|
|
н |
|
|
|
|
|
|
|
Рис. 3.5. БИНС
Гироскоп Г установлен на корпусе объекта. Датчик угла ДУГ измеряет углы поворота ротора относительно корпуса гироскопа. На объекте есть два акселерометра А1 и А2 со взаимно перпендикулярными осями чувствительности. Таким образом, состав ЧЭ БИНС не отличается от состава элементов на
36
платформе ИНС AT, схемное отличие состоит в том, что на ПК вместо вводится угол ψ с выхода сумматора. БИНС работает аналогично ИНС AT. Разница в том, что горизонтальная составляющая ускорения aг получается проектированиемускорений a1 и a2 сучетомуглакачкиψ,анеугла .Навигационные элементы , и ψ вычисляют так же, как и в ИНС AT.
Рассмотрим подробнее алгоритм работы ПА ИНС с различной ориентацией измерительных осей инерциальных датчиков.
3.4. Полуаналитические ИНС
Алгоритмы, по которым работает вычислительное устройство ПА ИНС, обеспечивают решение следующих задач:
выработку составляющих ускорений, которые необходимо вычесть на выходе акселерометров с тем, чтобы на входе первых интеграторов получить ускорения движения объекта относительно Земли;
вычисление угловых скоростей, с которыми необходимо поворачивать стабилизированную платформу (СП) вокруг трех ее осей таким образом, чтобы она сохраняла заданную ориентацию в пространстве, моделируя географический горизонтный трехгранник либо свободную в азимуте систему координат;
определение навигационных элементов;
дополнительные задачи, связанные, например, с переходом из географической в квазигеографическую систему координат и обратно.
Вкачестве примера рассмотрим гироориентатор морской ПА ИНС, представляющий собой трехосный гиростабилизатор с закрепленными на нем акселерометрами. В качестве чувствительных гироскопических элементов чаще всего используют либо два трехстепенных гироскопа, либо три двухстепенных, например поплавковых.
На рис. 3.6 приведена упрощенная схема гироориентатора ПА ИНС. Два ЧЭ Г1 и Г2 установлены на СП с двумя акселерометрами А1 и А2. Вектор ки-
гироскопа Г1 направлен вдоль оси z, вектор H2
вдоль оси y платформы.
Три степени свободы СП относительно корпуса обеспечивает карданов подвес. Корпус гироориентатора на морских объектах устанавливают так, чтобы ось наружного кольца подвеса была параллельна диаметральной плос-
37

кости судна. В этом случае ее называют осью бортовой качки (БК), ось промежуточного кольца осью килевой качки (КК), ось вращения СП азимутальной осью. На осях платформы установлены двигатели стабилизации и датчики углов, вырабатывающие сигналы, пропорциональные углам поворота кардановых колец: к.п угол поворота кольца БК относительно корпуса; п
угол поворота кольца относительно кольца БК; qп курсовой угол (поворот СП относительно кольца КК).
uy |
ux |
ПК
Д3
Д1 |
|
|
|
uy |
|
Д2 |
|
|
|
|
z ДДУ |
|
|
|
|
|
|
uz |
|
|
|
|
|
|
|
|
|
Г2 |
|
|
|
H1 Г1 |
x |
|
|
|
|
ДМ |
|
y |
|
|
|
|
|
|
А2 |
|
|
|
|
|
a2 |
||
z |
H |
|
|
|
|
|
x |
2 |
А1 |
|
y |
a1 |
|
|
|
|
|
|
|
|
ДУ2 |
|
|
|
|
|
к |
|
|
|
|
|
|
ДУ1 |
q
ДУ3
Рис. 3.6. Кинематическая схема гироориентатора ПА ИНС
Рассмотренные углы при подобной установке гироориентатора и моделировании СП географического трехгранника равны углам объекта с точностью до погрешностей стабилизации СП в горизонте и геометрических погрешностей карданова подвеса, т. е. qп К; п ; к.п к.
Угол рассогласования между роторами и корпусами гироскопов измеряется в трехстепенных гироскопах с помощью двухкоординатных датчиков
38

угла ДДУ с ортогональными осями списывания. Сигнал с Г2, соответствующий рассогласованию в азимуте, после усиления подается на двигатель Д3, установленный на оси азимутального кольца. Сигналы с Г1 через преобразователь координат ПК управляют двигателями Д1 и Д2. ПК работает по известному алгоритму:
ux ux cosq uy sinq;u y ux sinq u y cosq.
где ux и u y сигналы, снимаемые с гироскопа Г1;
ux и u y сигналы, управляющие стабилизирующими двигателями.
Сигнал, снимаемый с Г2 и соответствующий повороту платформы вокруг оси х, будет избыточным и его можно использовать для межрамочной коррекции этого гироскопа (рис. 3.6). Для управления движением СП на датчик моментов ДМ гироскопов подают сигналы x , y и z .
При выводе алгоритмов ПА ИНС предполагают, что элементы ИНС работают без ошибок и погрешности начальной выставки равны нулю.
ПА ИНС с географической ориентацией осей. Трехгранник xyz, связан-
ный с платформой, моделирует географический сопровождающий трехгранник ξηζ [8]. Сигналы с выходов акселерометров пропорциональны проекциям кажущихся ускорений объекта на оси х и у: ax a ; ay a , где a , a опре-
деляются выражениями:
|
|
|
a |
E 2 N sin N Etg / R1, |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a N 2 E sinК 2Etg / R1, |
|
(3.1) |
||||||
|
|
|
|
||||||||
|
|
|
a |
2 |
/ R |
2 |
/ R 2 |
|
|
|
|
|
|
|
E |
2cos g, |
|
||||||
|
|
|
|
N |
2 |
E |
1 |
|
|
|
|
где E , N , B проекции линейной скорости объекта на оси ξ, η, ζ географи- |
|||||||||||
ческой системы координат; |
|
|
|
|
|
|
|
||||
R2 |
a(1 e) |
|
радиус кривизны меридионального эллипса; |
|
|||||||
(1 e2 sin2 )3 |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
||
R1 |
|
a |
; R1cos радиус параллели; |
|
|
||||||
|
1 e2 sin2 |
|
|
||||||||
39

e |
a2 b2 |
; |
|
a |
|||
|
|
e,a,b эксцентриситет земного эллипсоида и его полуоси;
широта объекта;
угловая скорость вращения Земли.
Для получения скорости движения объекта по поверхности Земли необходимо, чтобы на входы первых интеграторов поступали только ускорения относительного движения. Следовательно, ускорения Кориолиса и ускорения, связанные с криволинейностью движения объекта (движение не по ортодромии), должны быть скомпенсированы [8]. Из (3.1) следует, что компенсируемые составляющие ускорения равны:
a |
2 |
N |
sin |
N |
|
E |
tg / R ; |
|
|||
к |
|
|
|
|
|
1 |
|
(3.2) |
|||
a |
2 |
|
sin 2 |
tg / R . |
|
|
|||||
E |
|
|
|
||||||||
к |
|
|
|
E |
|
1 |
|
|
|
||
Таким образом, на входы первых интеграторов поступают следующие величины:
aп w aк E ; |
aп a aк N . |
(3.3) |
После интегрирования, с учетом ввода начальных скоростей N (0) иE (0), получают северную и восточную составляющие относительной скорости движения объекта:
|
|
t |
|
|
|
|
t |
|
|
N N (0) aп dt N (0) N dt; |
|
||||||||
|
|
0 |
|
|
|
|
0 |
|
(3.4) |
|
|
|
|
|
|
|
|||
|
|
t |
|
|
|
|
t |
||
|
|
|
|
|
|
|
|
||
E E (0) aп dt E (0) Edt. |
|
||||||||
|
|
||||||||
|
|
0 |
|
|
|
|
0 |
|
|
Координаты местоположения объекта вычисляют с помощью вторичного |
|||||||||
интегрирования (с учетом начальных координат 0 и 0 ): |
|
||||||||
|
t |
N dt; |
|
0 |
t |
|
E |
dt, |
(3.5) |
|
|
||||||||
0 |
|
R |
|
R cos |
|
|
|||
|
0 |
2 |
|
|
0 |
|
1 |
|
|
где R1 и R2 определяютсятеми же выражениями, чтои в(3.1),которыеможно |
|||||||||
упростить, разложив в ряд. С точностью до e4 получим: |
|
||||||||
R a(1 0,5e2 sin2 ); |
R a(1 e2 |
1,5e2 sin2 ). |
(3.6) |
||||||
1 |
|
|
2 |
|
|
|
|
|
|
|
|
|
40 |
|
|
|
|
|
|