

2594
.pdfвеличинах кинематического несоответствия; экономический расчет трансмиссии, позволяющий оценить потери и окончательно выбрать схему силового привода автомобиля.
Как видим, основное внимание уделяется кинематическому несоответствию, которое возникает в результате воздействия многих эксплуатационных и конструктивных факторов, действующих одновременно при движении автомобиля, увеличивая или уменьшая общую величину кинематического несоответствия (разные радиусы колес, различное давление в шинах, неодинаковые нагрузки на колеса и др.).
В общем виде величина кинематического несоответствия
mК Sm Sk 100% (1 Sk ) 100%,
Sm Sm
где mК – кинематическое несоответствие элемента m относительно
элемента |
k в |
%; Sk – путь, проходимый элементом k; |
Sm – |
путь, |
|||||||
проходимый элементом m. |
|
|
|
|
|
|
|
|
|||
У рассматриваемой формулы имеются частные вариации. Например, с |
|||||||||||
учетом конструктивно-эксплуатационных параметров |
|
|
|
|
|
|
|||||
|
|
mК (1 |
rBi |
m |
) 100%, |
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
rBi |
k |
|
|
|
|
|
|
|
|
|
|
m |
|
|
|
|
|
|
||
где rB и |
rB |
– радиусы качения колес в ведомом режиме; |
i |
k |
и |
i |
m |
– |
|||
k |
m |
|
|
|
|
|
|
|
|
||
передаточные числа приводов колес. Изучение результатов анализа позволило заключить, что mК не позволяет оценить эффективность схемы силового привода в полной мере. Полученные авторами цитируемой работы значения кинематического несоответствия полноприводных автомобилей приведены в таблице 2.
Таблица 2
Значение возможного кинематического несоответствия автомобилей высокой проходимости
Причины возникновения |
Максимально возможное |
|||
|
значение |
К в % |
||
кинематического несоответствия |
|
|
|
m |
|
Межосевое |
|
Межколесное |
|
- колебания размеров шин при изготовлении и |
1,5 |
– 2,0 |
|
1,5 – 2,0 |
неравномерный износ в процессе эксплуатации |
|
|||
|
|
|
|
|
- перепад давления в шинах при эксплуатации |
1,0 |
– 1,5 |
|
1,0 – 1,5 |
- изменение координат центра тяжести |
1,0 |
– 1,5 |
|
0,5 |
- динамическое изменение вертикальных нагрузок |
4 |
– 5 |
|
2 |
на колесах |
|
|||
|
|
|
|
|
- преодоление препятствий крутизной до 30º |
|
16 |
|
– |
- движение по разбитым дорогам |
|
2 |
|
1 – 2 |
70 |
|
|
|
|

В работе [3] сформулирован закон оптимального распределения мощности по колесам, которому и должна соответствовать схема силового привода автомобиля высокой проходимости. Согласно этому закону, схема трансмиссии иее функционирование могут считаться оптимальными, если:
-во-первых, мощность, подводимая к каждому колесу, в любой момент времени, в любых условиях и режимах движения будет равна мощности сопротивления его качению, т.е. если схема трансмиссии обеспечивает его качение в свободном режиме;
-во-вторых, мощность, необходимую для преодоления внешних сопротивлений движению (разгон, тяга на крюке, преодоление подъема и сопротивления воздуха, сопротивления при криволинейном движении), схема распределяет по всем колесам равномерно (с учетом поправочного коэффициента на условия взаимодействия колеса и автомобиля с опорной поверхностью);
-в-третьих, суммарная мощность, подведенная к колесу, как в тяговом, так и тормозном режиме его движения не превосходит мощность 30%-го буксования (скольжения).
То есть
NKi NfKi Ki Nвн.с N30%бук ,
2nK
где NKi – мгновенная мощность, подведенная к i-му колесу; NfKi –
мгновенная мощность сопротивления качению i-го колеса; Nвн.с –
мгновенная мощность внешних сопротивлений движению автомобиля; nK
– число ведущих колес автомобиля; Ki – поправочный коэффициент, учитывающий условия взаимодействия колеса и автомобиля с опорной поверхностью и его возможности реализовать подводимую мощность.
В первом приближении
Ki Ki RZi max1 Ga 1 n,
где max – максимальный коэффициент сцепления шины данной конструкции, полученный на сухой асфальтобетонной дороге при полном скольжении; Ki – мгновенный коэффициент сцепления i-го колеса с опорной поверхностью в данных условиях движения; RZi – нормальная реакция дороги под i-м колесом в данный момент движения; n – число осей автомобиля; Ga – масса автомобиля.
Все члены формулы, отображающей закон оптимального распределения мощности, легко подсчитываются с помощью известных из теории автомобиля зависимостей.
71

Однако в реальном автомобиле к каждому колесу подводится мощность NОР , отличающаяся от оптимальной NООПТ , обеспечивающей минимальное сопротивление качению, на величину N . Поэтому в качестве общего критерия КД (коэффициента добротности, или
совершенства, схемы трансмиссии) следует принять среднеквадратичное отклонение, которое подсчитывается по формуле:
|
2n |
|
|
KД 1 NОa1 |
(NОiОПТ |
NOip )2 |
, |
|
i 1 |
|
|
где NОiОПТ – оптимальная мощность, подводимая к i-у колесу в данный момент времени; NОip – реально подводимая к нему мощность; n – число
осей; NОa – суммарная тяговая мощность, которая должна быть подведена от двигателя к трансмиссии и разделена по колесам автомобиля в заданных условиях и режимах его движения.
В случае идеальной трансмиссии (KД 1) - NОР NOОПТ . Во всех
остальных случаях схема силового привода не отличается добротностью, или несовершенна.
В работе [18] утверждается, что коэффициент добротности КД
непосредственно не связан с количественным изменением мощности необходимой для движения автомобиля с данной и оптимальной трансмиссиями. Поэтому для оценки эффективности схемы силового привода предлагается ввести коэффициент оптимальности распределения мощности (КОМ ) по ведущим мостам
N
КОМ 1 NОПТ , Оа
где NОПТ – мощность, подведенная к движителю автомобиля с оптимальным распределением мощности по осям; NОа – мощность, подведенная к движителю реального шасси.
Здесь же утверждается, что КОМ позволяет определить оптимальную характеристику дифференциала, других элементов трансмиссии и движителя не только при прямолинейном равномерном движении автомобиля, но и при повороте, ускорении, движении с прицепом, движении на подъеме и т.д. В результате схему силового привода автомобиля можно оптимизировать. Из этого делается вывод, что КОМ может быть использован в качестве оценочного коэффициента, выразив КПД шасси. Однако КОМ зависит еще и от того, насколько оптимально
72
распределяются массы автомобиля по ведущим мостам. Этот вопрос требует дополнительно рассмотрения.
Следовательно, разработка оценочного коэффициента силового привода является актуальной задачей.
Исходя из вышеизложенного, была сформулирована цель работы, которая ведется в ФГУП «НАМИ»: проведение теоретических исследований вновь разрабатываемой раздаточной коробки трехосного грузового автомобиля малой размерности с колесной формулой 6х6, создание опытных образцов и экспериментальное их исследование.
Всоответствии с целью работы были поставлены следующие основные задачи исследования:
1. Провести теоретические исследования по обоснованию схемы силового привода трехосного грузового автомобиля малой размерности с колесной формулой 6х6 НАМИ-3333.
2. Провести теоретические исследования и разработать оценочный коэффициент эффективности силового привода.
3. Разработать и исследовать раздаточную коробку для автомобиля НАМИ-3333 с тремя выходными валами и межосевым дифференциальным приводом.
4. Провести стендовые испытания вновь изготовленной раздаточной коробки для оценки адекватности принятых конструктивных решений.
5. Провести дорожные испытания опытного образца автомобиля НАМИ-3333 для оценки оптимальности обоснованности схемы силового привода.
Внастоящее время завершается изготовление вновь разработанных раздаточных коробок опытного образца автомобиля НАМИ-3333 [14], идет подготовка к сборке самого опытного образца и стендового оборудования для планируемых исследований.
Библиографический список
1.Агейкин Я.С. Проходимость автомобилей. – М.: Машиностроение, 1981. – 232 с.
2.Аксенов, П.В. Анализ схем силовой передачи автомобилей высокой проходимости [Текст] / П.В.Аксенов, А.С. Поляков// Автомобильная промышленность.– 1968. – № 10. – С. 11-15.
3.Аксенов П.В., Белоусов Б.Н. Критерии для оценки схем // Автомобильная промышленность. 1997. №6. –С. 19-21.
4.Андреев А.Ф. и др. Дифференциалы колесных машин / А.Ф. Андреев, В.В. Ванцевич,
А.Х. Лефарев: Под общ. ред. А.Х. Лефарова. – М.: Машиностроение, 1987. – 176 с.: ил.
5.Бахмутов С.В., Шухман С.Б., Лепешкин А.В. Силовой привод колес многоосных машин: перспективы научного поиска оптимальных решений// Автомобильная промышленность. 2005. №3. –С. 11-15.
6.Ванцевич В.В. Синтез схем привода к ведущим мостам и колесам многоприводных транспортно-тяговых машин/Автореферат дисс. … доктора технических наук. – Минск, 1992. – 46 с.
73
7.Гоберман В.А. Автомобильный транспорт в сельскохозяйственном производстве. – М.: Транспорт, 1986. – 287 с.
8.Дзоценидзе Т.Д. Обоснование параметров малогабаритных транспортных средств сельскохозяйственного назначения с широкими функциональными возможностями. Дисс. … доктора технических наук. – М., МГАУ им. В.П. Горячкина, 2009. – 407 с.
9.Дзоценидзе, Т.Д. Проблема создания новых средств развития транспортной инфраструктуры и пути ее решения на примере семейства МТС [Текст]/Т.Д.
Дзоценидзе, Леонов А.В., Козловская М.А., Журавлев А.В.//Труды НАМИ. Выпуск 241. М., Изд. ГНЦ РФ ФГУП «НАМИ»2009. С. 90-111. (М.А. Козловская - 0,40 п.л.)
10.Дзоценидзе, Т.Д. Разработка технологических процессов производства малогабаритных транспортных средств для сельского хозяйства [Текст]/Т.Д.
Дзоценидзе, Н.С. Кузнецов, М.А. Козловская, А.В. Журавлев//VIII Конгресс технологов автомобилестроения. Сборник докладов и тезисов. – М.: ОАО «Автосельхозмашхолдинг», 2008. С. 19-30. (М.А. Козловская - 0,38 п.л.).
11.Евтюшенков Н.Е. Перспективы транспорта для села до 2010 г.// Техника и оборудование для села. 2005. №1. С. 9-10; №2. С. 11-12.
12.Измайлов А.Ю. Технологии и технические решения по повышению эффективности транспортных систем АПК. – М.: ФГНУ «Росинформагротех», 2007. – 200 с.
13.Ипатов А.А., Дзоценидзе Т.Д. Создание новых средств развития транспортной инфраструктуры. Проблемы и решения. – М.: Металлургиздат, 2008. - 272 с., ил.
14.Козловская М.А. и др. Раздаточная коробка трехосной колесной машины /Е.Б.
Александров, Т.Д. Дзоценидзе, П.А. Кабанин, М.А. Козловская, А.Н. Лушников, А.П.
Недялков, С.Н. Семикин. Заявка № 2009141672 на выдачу патента Российской Федерации на изобретение от 12.11.2009.
15.Коротоношко Н.И. Работы НАМИ в области создания унифицированного семейства многоприводных автомобилей/ Тр. НАМИ, 1968, вып. 103. С. 74-89.
16.Петрушов В.А. Автомобили и автопоезда: Новые технологии исследования сопротивлений качения и воздуха. – М.: ТОРУС ПРЕСС, 2008. – 352 с.: ил.
17.Петрушов, В.А. О различии тягово-динамических показателей автомобилей с дифференциальным и блокированным приводом [Текст] / В.А. Петрушов, Ю.В. Пирковский, С.А. Шуклин // Автомобильная промышленность. – 1968. – № 10. – С. 8-11.
18.Пирковский Ю.В., Шухман С.Б. О коэффициенте оценки конструктивного совершенства шасси автомобиля // Автомобильная промышленность. 1997.№12.– С. 17-20.
19.Формирование и использование парка машин в малых формах хозяйствования. Научный доклад. – М.: ФГНУ «Росинформагротех», 2006. – 51 с.
20.Шуклин, С.А. Принципы выбора схемы силового привода многоприводного автомобиля на основе расчета экономической эффективности [Текст] / С.А. Шуклин, В.В. Московкин, В.И. Чергейко. – М.: НИИНАВТОПРОМ, 1975. – 48 с.
21.Шухман С.Б., Соловьев В.И., Прочко Е.И. Теория силового привода колес автомобилей высокой проходимости. Под общей редакцией д.т.н., проф. С.Б. Шухмана.
– М.: Агробизнесцентр, 2007. – 336 с.
22.Энциклопедия военных автомобилей [Текст] / Е. Д. Кочнев, Издание 2-е, доп. и перераб. – М.: ООО «Книжное издательство „За рулем“», 2008. — 640 с: ил.
74

УДК 629.11.012
МОДЕЛИРОВАНИЕ ПРЯМОЛИНЕЙНОГО ДВИЖЕНИЯ АВТОПОЕЗДА ПО ДЕФОРМИРУЕМОМУ ГРУНТУ ПРИ УПРУГОЙ
СВЯЗИ МЕЖДУ ТЯГАЧОМ И ПРИЦЕПОМ
Г.О. Котиев, д-р. техн. наук, проф.; В.А. Горелов, канд. техн. наук; Р.И. Жирный *
МГТУ им. Н.Э. Баумана; *ООО «Газсеверинвест»
Не секрет, что важнейшими для экономики РФ являются газодобывающая и нефтедобывающая отрасли. На сегодняшний день большое количество разрабатываемых месторождений нефти и газа находятся в труднодоступных районах Крайнего Севера, в условиях «вечной мерзлоты» и бездорожья, в связи с чем, доступ к ним весьма затруднён. Эти месторождения, в том числе, и на пол-ве Ямал, требуют обслуживания и доставки тяжёлых, крупногабаритных и неделимых грузов. Большие перспективы для решения подобных транспортных задач имеет направление, связанное с применением многоосных большегрузных автопоездов.
В рамках совместных исследований кафедры «Колёсные машины» МГТУ им. Н.Э. Баумана и ООО «Газсеверинвест» была создана транспортная система (рис. 1), прошедшая предварительные испытания на пол-ве Ямал в апреле 2009 года.
Рис.1. Транспортная система
75
Доказано, что в зависимости от характера связи между тягачом и прицепом, автопоезд может иметь различные характеристики по проходимости. В этой связи необходимо на стадии проектирования решить задачу по прогнозированию характеристик прямолинейного движения автопоезда по бездорожью при: буксировании прицепа движущимся тягачом с жесткой связью, буксировании прицепа движущимся тягачом с гибкой связью, буксировании прицепа неподвижным тягачом с использованием лебёдки и анкерно-упорного устройства. Данная задача решается с помощью имитационного математического моделирования.
Вопросам взаимодействия эластичного колёсного движителя и деформируемого опорного основания посвящено достаточно много трудов как отечественных, так и зарубежных авторов. Прежде всего, эти работы направлены на описание процесса взаимодействия колеса с грунтом в функции конструктивных параметров движителя и физико-механических свойств опорного основания. Следует отметить, что теория взаимодействия эластичного колеса с деформируемым опорным основанием в данном представлении весьма развита и позволяет описывать такие явления, как колееобразование, бульдозерный и экскавационный эффекты, уплотнение грунта и т.д. При таком подходе целью исследований является выбор оптимальных параметров конструкции колеса, как правило, по критериям максимального тягового усилия, минимизации затрат на движение и вредного воздействия на почву.
Однако когда движитель уже создан и необходимо исследовать его возможности в составе колёсной машины, например, в случае оценки средней скорости движения на заданном маршруте, с целью решения задачи о рациональном распределении мощности по колёсам, для оценки нагруженности элементов трансмиссии представляется целесообразным использовать характеристики тягово-сцепных свойств (рис. 3) и потерь энергии (рис. 2) для различных условий взаимодействия колеса с опорным основанием, полученные при экспериментальных исследованиях в грунтовом канале или на полигоне (рис. 4 - 7).
Характеристиками процесса прямолинейного качения колеса в различных случаях движения являются удельные потери энергии fw (потери энергии при качении на единицу пройденного колесом пути при единичной вертикальной нагрузке), удельная свободная тяга (продольная сила, приложенная к оси катящегося колеса, при единичной вертикальной нагрузке на его ось),
|
S |
|
k |
rko Vxk |
|
r |
|
V |
|
|
|
|
|
||||
коэффициент буксования |
Б |
|
|
|
|
|
1 |
k |
; |
r |
|
xk |
[1], где |
k |
- |
||
|
|
|
r |
|
|
|
|||||||||||
|
|
|
|
k |
|
r |
k |
|
k |
|
|
||||||
|
|
|
|
|
|
ko |
|
ko |
|
|
|
|
|
|
|||
угловая скорость вращения колеса; rko - радиус колеса в свободном режиме; rk - радиус качения колеса; Vxk - скорость цента масс колеса в продольном направлении.
76

Результаты испытаний представляются в виде тягово-энергетических fw f ( ) и тягово-сцепных характеристик f (SБ ). Примеры
экспериментальных характеристик, виды грунтового канала и экспериментальная установка представлены на рис. 2-7 [1].
Методика проведения экспериментальных исследований с целью получения представленных характеристик опирается на уравнение энергетического баланса и подробно описывается в [2].
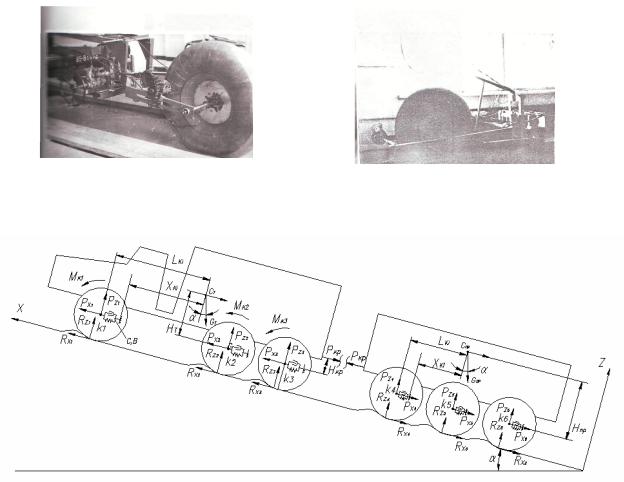
Построение математической модели движения автопоезда рассмотрим на примере трехосного тягача с возможностью реализации индивидуального, дифференциального и блокированного привода колёс и трёхопорного прицепа в ведомом режиме. Расчётная схема автопоезда, представленная на рис. 8, принята с учётом характера решаемой задачи и описывается соответствующими уравнениями движения для тягача (1) и прицепа (2).
Рис. 2. Удельные потери энергии при |
Рис. 3. Тягово-сцепные характеристики |
качении модификаций колеса |
модификаций колеса |
Рис. 4. Цилиндрическаямодификация колеса |
Рис. 5. Образец в грунтовом канале |
а) Исследование ведомого колеса б) Опыты с ведущим колесом Рис. 6. Общий вид экспериментальной установки для исследования взаимодействия с
грунтом крупногабаритного пневматического колеса при нагрузке 100-250 кН
77
а) Большой канал с пылевидным грунтом б) Малый канал с мягко-сыпучим грунтом Рис. 7. Экспериментальная лабораторная установка для исследования взаимодействия эластичных оболочек с очень слабыми пылевыми и мягко-текучими грунтами
Рис. 8. Расчетная схема движения автопоезда
Для тягача
|
|
3 |
|
mТ VX Т |
2 PX i mТ |
g sin( ) PКР |
|
|
|
i 1 |
(1) |
|
|
||
Iki ki |
MKi (1 SБi )( fw i i ) RZ i rKo |
||
mKi |
aX K i |
i RZ i PX i |
mКi g sin( ), |
Для прицепа |
|
|
|
|
|
6 |
|
mПР VXПР 2 PX i mПР g sin( ) PКР |
|||
|
|
i 4 |
(2) |
|
|
||
Iki ki |
(1 SБi ) ( i fw i ) RZ i rKo |
||
mKi |
aX Ki |
PX i i RZi |
mКi g sin( ), |
где i = 1, …3; mТ |
и mПР |
- масса тягача и прицепа, соответственно; mKi - масса |
|
колеса; Iki - момент инерции колеса; i - номер колеса; VX Т и VXПР - продольное ускорение центра масс тягача и прицепа, соответственно; ki - угловое
78
ускорение i-го колеса; aX Ki - продольное ускорение центра масс i-го колеса; g -
ускорение свободного падения; - угол наклона опорной поверхности. Связь тягача и прицепа реализуется через силу тяги на крюке PКР ,
которая определяется по зависимости:
PКР (XСТ XС ПР ) C (VXТ VX ПР ) B, |
(3) |
где C - коэффициент жесткости сцепного устройства в продольном направлении; B - коэффициент демпфирования сцепного устройства в
продольном направлении; XСТ - координата центра масс тягача по оси Х; XС ПР - координата центра масс прицепа по оси Х; VXТ - скорость центра масс тягача; VX ПР - скорость центра масс прицепа.
Таким образом, изменяя коэффициенты жесткости и демпфирования узла сочленения, можно задавать различную связь между тягачом и прицепом.
Cила, действующая на корпус тягача со стороны колеса по оси X:
PX i (XKi LKi ) Cподв (VX Ki VX C ) Bподв , |
(4) |
где Cподв - коэффициент жесткости подвески в продольном направлении; Bподв - коэффициент демпфирования подвески в продольном направлении; XKi - расстояние от центра масс до оси колеса по оси Х; LKi - расстояние от центра масс до точки крепления подвески по оси Х; VX C - скорость центра масс автомобиля.
Cила, действующая на корпус прицепа со стороны колеса по оси X:
PX i (LK i XK i ) Cподв (VX C VX K i ) Bподв , |
(5) |
||||||
Пусть удельная свободная сила тяги соответствует рис. 3 и |
|||||||
определяется по зависимости: |
|
||||||
sign(SБ ) max (1 e |
|
|
SБ |
|
|
), |
(6) |
|
|
||||||
|
|||||||
SO |
|||||||
где - максимальное значение коэффициента силы сцепления колеса с
max
опорной поверхностью;S0 - константа.
Удельные потери энергии при качении колеса:
fwi fwo Kf |
log(1 |
|
i |
), |
(7) |
||
|
|
1 |
|
||||
|
imax |
(1 eSO ) |
|
||||
|
|
|
|||||
где fwo - коэффициент удельных энергетических потерь при отсутствии буксования в свободном режиме качения; Kf - коэффициент
пропорциональности.
Вертикальная реакция в пятне контакта колес тягача с опорной поверхностью определяется следующей зависимостью:
RZ i PZ i mKi g cos( ) |
(8) |
79 |
|