

2594
.pdfмультидоменные компонентные модели с ненаправленными связями и, вовторых, не позволяет задавать описание элементарных компонентов средствами входного языка, что приводит к появлению в модели искусственных структурных схем, не соответствующих структуре моделируемой системы. Для исключения данных недостатков можно использовать подсистему SIMULINK пакета МATLAB - интерактивная среда для моделирования и анализа широкого класса динамических систем с помощью блок-диаграмм. При моделировании с использованием SIMULINK реализуется принцип визуального программирования, в соответствии с которым пользователь на экране из библиотеки стандартных блоков создает модель устройства и осуществляет расчеты. При этом, в отличие от классических способов моделирования, пользователю не нужно досконально изучать язык программирования и численные методы математики, а достаточно общих знаний, требующихся при работе на компьютере, и, естественно, знаний той предметной области, в которой он работает. При моделировании пользователь может выбирать метод решения дифференциальных уравнений, а также способ изменения модельного времени (с фиксированным или переменным шагом). В ходе моделирования имеется возможность следить за процессами, происходящими в системе. Для этого используются устройства наблюдения, входящие в состав библиотеки Simulink. Результаты моделирования могут быть представлены в виде графиков или таблиц.
В обычной механической трансмиссии автомобиля, динамический момент может возникнуть в случаях, например, при резком трогании с места или торможения при не выключенном сцеплении. Для механической трансмиссии с ГСУ представляет один еще случай – динамические нагрузки, возникающие в трансмиссии при запуске ДВС с ходу. В настоящей работе представлен метод моделирования и расчета динамических нагрузок в механической трансмиссии автомобиля с ГСУ в среде программирования Matlab Simulink.
На рис. 1. представлена динамическая схема, по которой можно определить динамические нагрузки в трансмиссии автомобилей с ГСУ. В схеме приняты следующие обозначения: -моменты инерции Iдвс - ДВС с маховиком; Iэдэлектродвигателя; Iс -деталей сцепления; Iкп -главной КПП и раздаточной коробкой; Iпк -деталей переднего моста с передними колесами; Iзк деталей заднего моста с задними колесами; Iа маховика, эквивалентного поступательно-движущейся массе автомобиля; - жесткости и коэффициенты демпфирования: сэ,bс –сцепления; сэ,bэ – звена, связывающего вал электродвигателя с раздаточной коробкой; сптр, bптр,; сзтр, bзтр,– деталей трансмиссий переднего и заднего моста; спш, bпш,, сзш, bзш – тангенциальные жесткости и коэффициенты демпфирования передней и задней шин; - внешние моменты: Мсп – момент сопротивления (включает
100
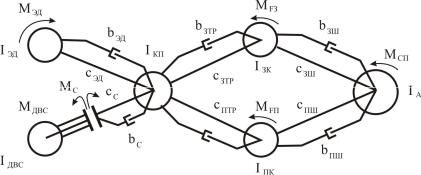
моменты: момент сопротивления подъему, момент аэродинамического сопротивления). Мэд -момент электродвигателя; Мс -момент трения сцепления; Мдвс -момент ДВС; МFЗ, МFП – моменты сопротивления качению на ведущих колесах переднего и заднего моста;
Рис. 1. Динамическая схема трансмиссии автомобиля с ГСУ
Дифференциальные уравнения движения системы, приведенной на рис. 1, можно записать в виде (1)
I |
|
|
|
|
|
|
|
|
|
|
эд эд |
Mэд cэ( э кп) bэ ( э кп ); |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
Ic c Mc cc ( c кп) bc ( c |
кп ); |
|
|
|
|
|
||||
I |
|
|
|
|
|
|
|
|
|
|
двс двс Mдвс Mc; |
|
|
|
|
|
|
|
|
||
I |
|
|
|
|
|
|
|
|
|
|
кп кп |
cc ( c кп) bc ( c |
кп ) cэ ( э кп) bэ( э |
кп ); |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
u[cзтр (u. кп зк ) bзтр (u. кп |
зк )] u.[cптр (u. кп пк ) bптр (u. кп |
пк )]; |
|
||||||
I |
|
|
|
|
|
|
|
|
|
|
зк зк |
cзтр (u. кп зк ) bзтр (u. кп |
зк ) cзш ( зк а ) bзш |
( зк |
а ) MFЗ; |
|
|||||
I |
|
|
|
|
|
|
|
|
|
(1) |
пк пк |
cптр (u. кп пк ) иптр (u. кп |
пк ) спш ( пк а ) ипш ( пк а ) MFП ; |
||||||||
I |
|
|
|
|
|
|
|
|
; |
|
а а cзш ( зк а ) bзш ( |
зк а ) cпш ( пк а ) bпш ( пк а ) MСП |
|
||||||||
MУЭД |
|
|
|
|
|
|
|
|
|
|
cэ ( э кп ) bэ ( э |
кп); |
|
|
|
|
|
|
|||
MУС cc ( c кп ) bc ( c кп);
МПТР cптр (u. кп пк ) bптр (u. кп пк );
МЗТР cзтр (u. кп зк ) bзтр (u. кп зк );
МЗШ cзш ( зк а ) bзш ( зк а );
МПТР спш ( пк а ) bпш ( пк а ),
где: МУЭД, МУС, Мптр, Мптр, Мпш, Мпш – упругие моменты на валу электродвигателя, сцепления, в передней и задней трансмиссиях моста, в передней и задней шинах, соответственно;
φэ, φс, φдвс, φкп, φзк, φпк, φа: углы поворота масс Iэд, Iс, Iдвс, Iкп, Iзк, Iпк, Iа
соответственно;
u – передаточное число трансмиссии.
При запуске ДВС с ходу Мдвс является моментом сопротивления и описывается выражением [3]:
101
Mдвс QVn(B D.n)[Н.м]
где B, D, Q – эмпирические коэффициенты
(для бензинового двигателя В=0,4-0,5; В=0,0035; Q=12,5); Vn, n – рабочий объем и обороты ДВС.
При определении динамических нагрузок в трансмиссии момент трения сцепления Мс представляется в виде экспоненциальной
зависимости [1]:
Мс=Мсц,ст(1-e-kt),
где: Мсц,ст – статический момент трения в сцеплении;
k = 3/tc – константа, характеризующая темп включения сцепления;
tc – время включения сцепления. Величина tс является случайной, можно принять tсmin=0,015c, tс max=1,5c
Таким образом, решая системы уравнений (1) можем определить моменты в упругих звеньях трансмиссии и также углы поворота φi.
В качестве модельного образца взята трансмиссия автомобиля УАЗ 5153 с ГСУ, разработанной учеными и специалистами МГТУ «МАМИ» [2]. Начальные условия при моделировании: при t=0; Мэд=180Нм; скорость автомобиля va = 15км/ч.
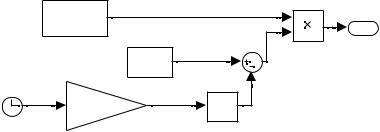
На рис. 2 представлена модель для определения момента трения сцепления Мс и на рис. 3 представлены зависимости момента трения сцепления от времени и времени включения сцепления.
На рис 4. представлена структурная модель SIMULINK пакета MATLAB для расчета динамических нагрузок в механических трансмиссией автомобилей с ГСУ. На модели были использованы блок-диаграммы и функция MATLAB (MATLAB Fcn), построена по системе уравнения (1).
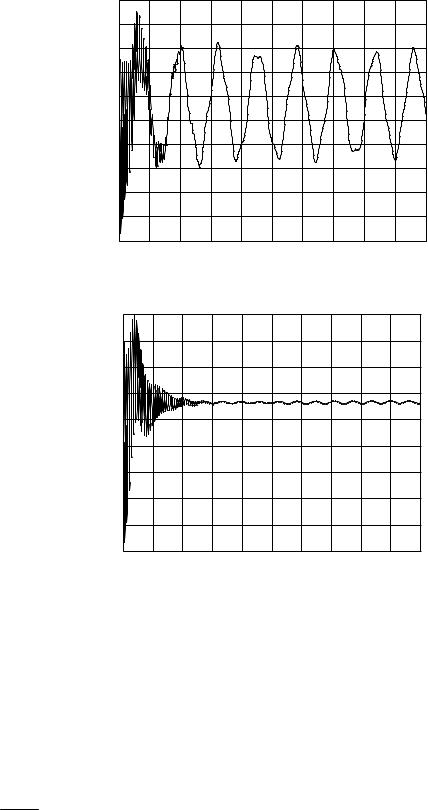
На рис. 5 представлены результаты расчёта динамических моментов на валу электродвигателя в двух случаях: без учета (рисунок 5,а) и с учетом (рисунок 5,б) коэффициентов демпфирования шины.
Mcmax |
1 |
|
|
Constant1 |
Product Mc |
1 |
|
Constant |
eu |
-3/tc |
|
Clock |
Math |
Gain |
Function |
|
Рис. 2. Модель, определяющая момента трения сцепления
Результаты расчетов показали, что динамические моменты, возникающие в ветвях трансмиссии автомобиля с демпфирующими элементами, почти на 89% меньше его в трансмиссии без демпфирующих
102

элементов и в ветвях трансмиссии автомобиля с демпфирующими элементами, колебания упругих моментов также быстро затухают.
|
250 |
|
|
|
|
|
|
|
|
tc=0.2c |
|
|
|
|
|
|
|
|
|
|
|
tc=0.8c |
|
|
200 |
|
|
|
|
|
|
|
|
|
|
Мс |
150 |
|
|
|
|
|
|
|
|
|
|
сцепления |
|
|
|
|
|
|
|
|
|
|
|
100 |
|
|
|
|
|
|
|
|
|
|
|
трения |
50 |
|
|
|
|
|
|
|
|
|
|
Момент |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0.2 |
0.4 |
0.6 |
0.8 |
1 |
1.2 |
1.4 |
1.6 |
1.8 |
2 |
|
0 |
Время [сек]
Рис. 3. Зависимости момента трения сцепления отвремени и временивключения сцепления
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Mue |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
1- Mue |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1/s |
Muc |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Mekfout |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
2- Muc |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1/s |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Mucfout |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Mct |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
3- Mct |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1/s |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Mtptfout |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Mcs |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
4- Mcs |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1/s |
Mlt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Mtpsfout |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1/s |
|
|
|
|
|
|
|
|
|
Scope |
|
|
|
|
|
Mloptfout |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
5- Mlt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Mls |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1/s |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Mlopsfout |
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6- Mls |
|
|
|
|
|
|
|
|
|
MATLAB |
|
|
|
|
|
|
|
|
|
|
|
|
33 -wel |
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
input2 |
|
|
|
|
|
|
|
|
Function |
|
|
|
|
|
|
|
|
|
1/s |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
welout |
|
|
|
|
|
|
|
|
|
Mcout |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
Subsystem |
MATLAB Fcn |
34 -we |
|
|
|
7- Mfe |
|
1/s |
weout |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
35 -wc |
wcout |
|
|
8- Ml |
|
|
|
1/s |
|
|
|
|
|
|
|
36-whs |
whsout |
|
|
|
|
|
|
1/s |
|
|
|
|
Mcfout |
|
37-wlt |
wltout |
|
|
|
|
|
1/s |
|
|
|||
|
|
|
|
38-wls |
wlsout |
va |
jaout |
|
|
|
|
1/s |
|||
Mfeout |
Mload |
|
|
wa |
|
||
|
|
waout |
|
||||
|
|
|
|
39wa |
ja |
vaout |
|
|
|
|
|
1/s |
|
|
|
|
Mload wa |
|
|
|
Subsystem1 |
|
|
|
|
|
|
|
|
||
|
Mfe |
we |
|
|
|
|
|
Рис. 4. Структурная схема SIMULINK пакета MATLAB для расчета динамических нагрузок в механических трансмиссией автомобилей с ГСУ
103
260 |
|
|
|
|
|
|
|
|
|
|
240 |
|
|
|
|
|
|
|
|
|
|
220 |
|
|
|
|
|
|
|
|
|
|
200 |
|
|
|
|
|
|
|
|
|
|
180 |
|
|
|
|
|
|
|
|
|
|
160 |
|
|
|
|
|
|
|
|
|
|
140 |
|
|
|
|
|
|
|
|
|
|
120 |
|
|
|
|
|
|
|
|
|
|
100 |
|
|
|
|
|
|
|
|
|
|
80 |
|
|
|
|
|
|
|
|
|
|
60 |
0.5 |
1 |
1.5 |
2 |
2.5 |
3 |
3.5 |
4 |
4.5 |
5 |
0 |
||||||||||
|
|
|
|
|
t[ |
] |
|
|
|
|
|
|
|
а) без учета bзш и bпш |
|
|
|
||||
240 
220
200
180
160
140
120
100
80
60 
0 |
0.5 |
1 |
1.5 |
2 |
2.5 |
3 |
3.5 |
4 |
4.5 |
5 |
t[ ]
б) с учетом bзш и bпш
Рис. 5. Зависимости упругих моментов на валу двигателя от времени
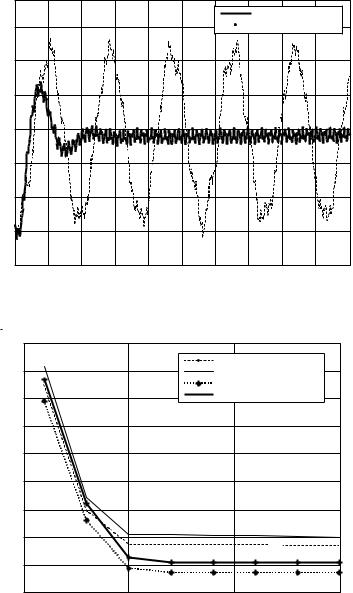
На рис. 6 представлены результаты расчёта динамических моментов в передней трансмиссии автомобиля УАЗ 3153 с ГСУ при запуске ДВС с ходу также в двух случаях: без учета и с учетом коэффициентов демпфирования шины bзш и bпш.
Для описания и оценки максимальных динамических нагрузок использован коэффициент динамичности кД, под которым понимается отношение:
кД Ммах ; где: Ммах – максимальные значения момента, возникающего в
МТмах
ветвях трансмиссии автомобиля при включении сцепления.
Мтмах=МЭДмах+МДВСмах
104
МЭДмах, МДВСмах: максимальные значения момента электродвигателя и ДВС
На рис. 7 представлены зависимости коэффициентов динамичностей в ветвях трансмиссии от времени включения сцепления tc (темпа включения сцепления) при запуске ДВС на 4-ой передаче. Результаты расчетов показали, что чем быстрее включение сцепления (чем меньше tc), тем больше динамические нагрузки, возникающие в ветвях трансмиссии автомобиля. Однако, когда tc повышает до предельного значения tcп (в данном случае tcп≈0,7c), повышение времени включения сцепления tc > tcп больше не снижает коэффициенты динамичностей в ветвях трансмиссии но процесс буксования сцепления увеличивается.
3000 |
|
|
|
|
|
|
|
b |
b |
|
|
|
|
|
|
|
|
b |
b |
|
|
2500 |
|
|
|
|
|
|
|
|
|
|
2000 |
|
|
|
|
|
|
|
|
|
|
1500 |
|
|
|
|
|
|
|
|
|
|
1000 |
|
|
|
|
|
|
|
|
|
|
500 |
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
- |
|
|
|
|
|
|
|
|
|
|
500 0 |
0.5 |
1 |
1.5 |
2 |
2.5 |
3 |
3.5 |
4 |
4.5 |
5 |
|
|
|
|
|
t[ |
] |
|
|
|
|
Рис. 6. Зависимости упругих моментов в передней трансмиссии от времени
2.2 |
|
|
|
2.1 |
|
|
|
2 |
|
|
|
1.9 |
|
|
|
1.8 |
|
|
|
1.7 |
|
|
|
1.6 |
|
|
|
1.5 |
|
|
|
1.4 |
|
|
|
1.3 |
0.5 |
1 |
1.5 |
0 |
|||
|
t |
[ |
] |
Рис. 7. Зависимости кд в ветвях трансмиссии от времени включения сцепления
105
Заключение
Метод моделирования механической трансмиссии автомобиля с ГСУ в среде программирования Matlab Simulink дает возможность подробно исследовать динамические процессы в трансмиссии с ГСУ и также влияния структурных параметров на динамические нагрузки в механической трансмиссии автомобиля с ГСУ при запуске ДВС с ходу.
Библиографический список
1.Гришкевич А.И., Вавула В.А. и др. Автомобили, конструкция, конструирование и расчет, трансмиссия. –М.: Вышэйшая школа, 1985. –240с.
2.Гибридные автомобили – столбовая дорога к экономичному и экологически чистому транспорту. д.т.н. Карунини А.Л. д.т.н Бахмутов С.В. к.т.н. Селифонов В.В. и др. // Автомобильных инженеров №3(44), 2007
3.Селифонов В.В. – Теория автомобиля. – М.: Гринлайт, 2009 – 208с.
4.The MathWorks, Inc. 2002 - Simulink Model-Based and System-Based Design.
УДК 629.1.098.001.01
АВТОМОБИЛИ ДЛЯ МЕГАПОЛИСОВ
А.В. Николаенко, канд. экон. наук; С.В. Бахмутов, д-р техн. наук; В.В. Селифонов, канд. техн. наук; А.Н. Титков *, канд техн. наук МГТУ "МАМИ"; *ОАО «АСМ-холдинг»
Сегодня в мире существует порядка 1 млрд. автомобилей, суммарная мощность двигателей которых более чем в 5 раз превосходит мощность всех существующих электростанций. Кроме автомобилей есть еще тракторы, сельхозмашины, стационарные установки с ДВС. Все эти транспортные и стационарные средства ежегодно выбрасывают в окружающую среду более миллиарда тонн вредных веществ. Отдельно стоит проблема выбросов СО2, Хотя этот газ и является безвредным для человека, вместе с тем его увеличение в атмосфере приводит к глобальному потеплению атмосферы.
Избежать этих негативных последствий путем отказа от автомобилей невозможно, поскольку они вошли во все сферы нашей деятельности.
Очевидно, что единственно возможным путем уменьшения вредных последствий является максимально возможное уменьшение вредных выбросов и сокращение расхода органического топлива при эксплуатации автомобильного транспорта. Наиболее интенсивные работы по ряду направлений начались 15-20 лет назад.
Одно из возможных направлений – создание электромобилей на топливных элементах с использованием в качестве топлива водорода.
106
Президент США Д.Буш в 2002 г. утвердил программу и выделил более $4 млрд. на создание топливных элементов приемлемой стоимости, согласно которой в США с 2015 г. автомобили с ДВС выпускаться не должны. Фирмы ДМ, Форд и Крайслер, развернув работу по топливным элементам и вложив дополнительно почти такую же сумму в НИОКР, сумели на порядок снизить стоимость топливных элементов и повысить их характеристики, но по цене они остаются все еще на порядок дороже аналогичных ДВС.
Следует иметь в виду, что в настоящее время топливные элементы используют в качестве источника энергии чистый водород, получение которого требует также значительных энергозатрат. Специалисты ведущих автомобильных фирм считают, что работа по указанному кардинальному направлению должна интенсивно продолжаться, хотя реальное ее воплощение следует ожидать не ранее чем через 20-30 лет.
Остается проблема сегодняшнего дня, когда мировой парк автомобилей до кризиса рос ежегодно на 35-40 млн. ед. при выпуске 62-65 млн. автомобилей. В мире наметилось несколько альтернативных направлений.
Япония сделала ставку на гибридные автомобили. Основной разработчик – фирма Тойота с массовым гибридным автомобилем «Приус». Считается, что такой автомобиль может дать экономию топлива 20-30%, а в последних разработках называется цифра 40-60%.
Европа пошла по пути совершенствования конструкции дизелей (повышение давления впрыска – система Коммон Рэйл, пьезоэлектрические форсунки, дающие многоразовый впрыск, изменяемые фазы газораспределения, двухступенчатый турбонаддув и т.д.). В результате удалось снизить расход топлива на 15-20%. Дизели существенно подорожали, а экологический эффект улучшился, но не кардинально.
Американцы, привыкшие к бензиновым двигателям, занялись их усовершенствованием путем отключения ряда цилиндров у V-образных двигателей, введения систем «стоп энд гоу», непосредственного впрыска бензина в цилиндры, изменения фаз газораспределения и др. Однако, параллельно, опираясь на опыт Японии, они занялись и созданием собственных гибридных автомобилей. В последние два года и Северная Америка, и Европа буквально бросились нагонять упущенное в создании гибридных автомобилей, и сегодня практически нет ни одной ведущей фирмы в мире, которая бы не занималась этой проблемой.
В настоящее время гибридные автомобили выпускают или готовят серийное производство Тойота, Ниссан, Мазда, Форд, ДM, Фиат, Рено, Фольксваген, Субару, Порше и многие другие.
К сожалению, в России этой проблемой наши предприятия практически не занимаются.
ОАО «АВТОВАЗ» на Московском автосалоне в 2007 г. показал экспериментальный электромобиль на топливных элементах. В следующем
107
году была подготовлена усовершенствованная модель электромобиля, однако
всвязи с частыми изменениями в руководстве предприятия, а затем и наступивший кризис привели к прекращению этой перспективной работы.
ОАО «ГАЗ» занялся работой по чистому электромобилю с нулевым выбросом. На Московском автосалоне в 2009 г. Была выставлена «Газель» с электрической трансмиссией и литий-ионными электрическими накопителями. Параметры этого электромобиля показывают, что он может использоваться только в ограниченных городских условиях. Большинство исследователей считают, что при современных накопителях электроэнергии производство чистых городских электромобилей не превысит 20%.
ОАО «ЛиАЗ» изготовил опытный гибридный автобус по последовательной схеме и заявил о желании поставить его на производство
в2010 году, однако реального подтверждения этому нет.
Кроме автопредприятий гибридными автомобилями занимался в 19992002 г.г. ОАО «АСМ-холдинг». Был построен образец автомобиля А- класса (проект «Мишка»), исключающий механические элементы трансмиссии. Двигатель соединялся с генератором-стартером, ток от генератора поступал на 4 мотор-колеса или в накопитель энергии – тяговые суперконденсаторы. Мотор-колеса имели обратимые электродвигатели, которые позволяли проводить рекуперацию электроэнергии. Для повышения динамики разгона, защиты тяговых суперконденсаторов от высоких токов, повышения КПД рекуперации у каждого мотор-колеса имелся свой небольшой разгонный супер-
конденсатор с очень низким внутренним сопротивлением даже при -45- 50оС.
Образец был построен – показан на Московском автосалоне в 2001 г., а его доводка так и не была начата из-за прекращения правительством Москвы финансирования этого проекта.
МГТУ «МАМИ» совместно с НПП «КВАНТ» в 2006 г. изготовил концептуальный образец гибридного автомобиля на базе серийного полноприводного УАЗ-3153.
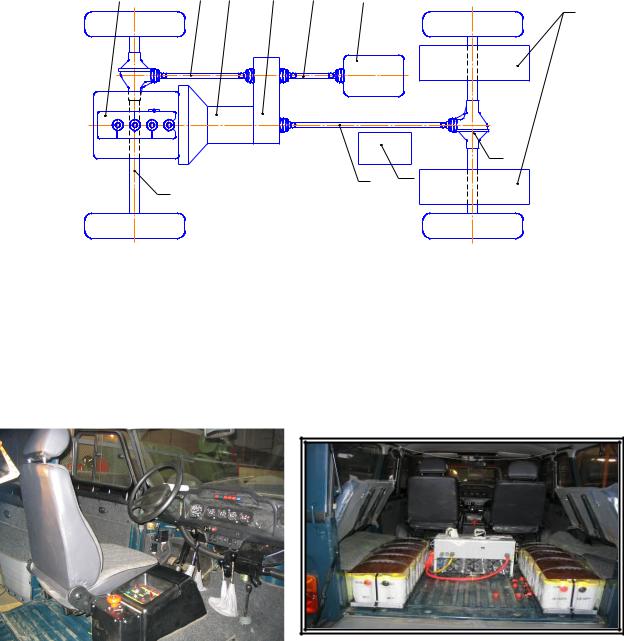
Разработчики остановились на параллельной схеме гибридной силовой установки (ГСУ), поскольку, во-первых, отечественная промышленность выпускает все необходимые для ее реализации автомобильные и электрические агрегаты и узлы; во-вторых, она обеспечивает автомобилю топливную экономичность, практически не отличающуюся от той, которую может дать смешанная схема; в-третьих, она проще последней по исполнению.
Компоновочная схема автомобиля УАЗ-3153, оборудованного ГСУ МАМИ-КВАНТ, приведена на рис. 1.
108
1 |
|
2 |
|
3 |
|
4 |
|
5 |
|
6 |
7
|
11 |
9 |
10 |
8 |
|
Рис. 1.
Как видно из рисунка, в нее входят элементы не только серийного автомобиля (ДВС, коробка передач, приводы переднего и заднего мостов), но и новые для автомобиля устройства (обратимая электрическая машина 6 со своим приводом 5, система управления тяговым электрооборудованием 10 и свинцово-кислотные накопители электрической энергии 7). Установка элементов ГСУ на многоцелевом автомобиле УАЗ-3153 показана на рис. 2.
Рис. 2.
Сотрудники Научно-образовательного центра «Автомобили с гибридными силовыми установками» при кафедре «Автомобили» им. Е.А.Чудакова МГТУ «МАМИ» совместно с сотрудниками НИЦИАМТ ФГУП НАМИ провели на полигоне испытания автомобиля с гибридной силовой установкой на сертифицированном стенде с беговыми барабанами.
Ниже приведены результаты экспериментальных исследований. Расход топлива определен при движении автомобиля в городском
цикле по правилу № 83 ЕЭК ООН. Штатный автомобиль имел – 20,45 л/100 км. При определении расхода топлива, без учета небольшого
109