

2519
.pdfМАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И СИСТЕМЫ АВТОМАТИЗАЦИИ ПРОЕКТИРОВАНИЯ
УДК 621.87; 681.5
МЕТОДИКА РЕШЕНИЯ ОБРАТНОЙ КИНЕМАТИЧЕСКОЙ ЗАДАЧИ ГРУЗОПОДЪЕМНОГО КРАНА
В.С. Щербаков, М.С. Корытов, С.В. Котькин
Аннотация. Статья посвящена вопросу определения значений управляемых координат грузоподъемного крана при заданных координатах точки подвеса груза.
Ключевыеслова:грузоподъемный кран, алгоритм, обратная кинематическая задача.
Введение. Задача определения управляемых координат грузоподъемного крана по координатам рабочего органа, или обратная задача кинематики, является актуальной. Решение обратной задачи кинематики является неотъемлемой частью прикладных задач более высокого иерархического уровня, таких, как синтез и оптимизация конструктивных параметров машины, технологических параметров рабочего процесса и др. Прямое аналитическое решение этой задачи во многих случаях затруднено, хотя является наиболее предпочтительным по причине его максимальной точности.
Для грузоподъемного крана решение обратной задачи кинематики необходимо при планировании траектории в пространстве конфигураций машины. Определенную сложность при этом создает кинематическая избыточность механической системы крана, которая приводит к неоднозначности решения задачи и требует поэтапного решения с наложением дополнительных ограничений.
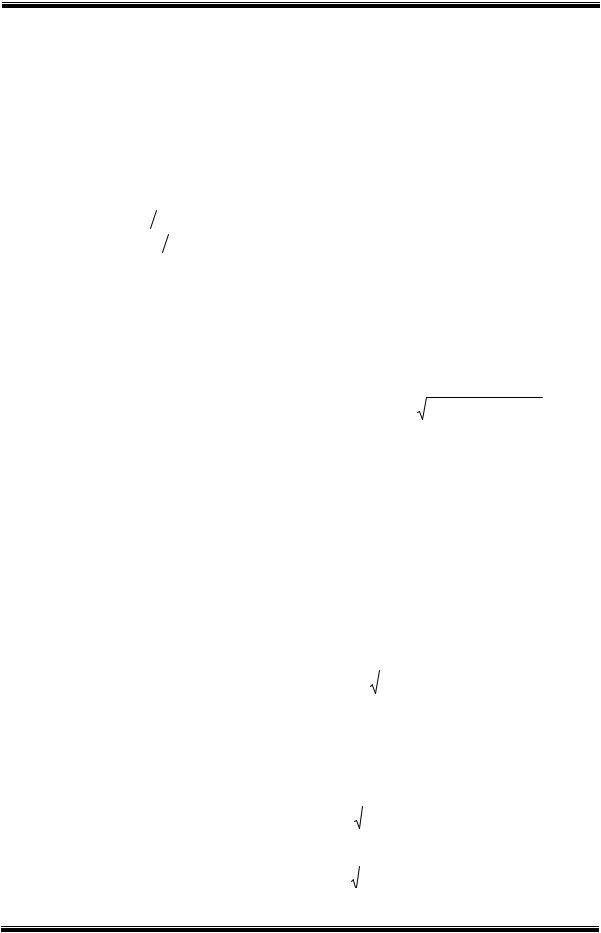
При математическом описании механизма грузоподъемного крана были приняты 13 обобщенных координат (рисунок 1): перемещение базового шасси вдоль оси X0 (q1); перемещение базового шасси вдоль оси Y0 (q2); перемещение базового шасси вдоль оси Z0 (q3); поворот базового шасси вокруг оси X1 (q4); поворот базового шасси вокруг оси Z1 (q5); поворот базового шасси вокруг оси Y1 (q6); поворот поворотной платформы
вокруг оси Y2 (q7); поворот стрелы вокруг оси Z3 (q8); выдвижение телескопического звена вдоль оси X4 (q9); перемещение груза вдоль оси Y5 (q10); поворот груза вокруг оси Z5 (q11); поворот груза вокруг оси X5 (q12); поворот груза вокруг оси Y5 (q13). В случае обеспечения горизонтального положения опорной платформы при помощи систем автоматического горизонтирования [1, 2, 3, 4, 5, 6, 7, 8], может использоваться методика определения значений управляемых координат грузоподъемного крана по известным координатам груза, которая заключается в описанной ниже последовательности шагов. Предполагаются известными декартовы координаты точки подвеса груза [xгр; yгр; zгр], заданные в неподвижной системе координат O0Х0Y0Z0, а также координаты точки O1 начала системы координат O1Х1Y1Z1, связанной с базовым шасси автокрана: [q1; q2; q3; 0; 0; q6].
Алгоритм определения значений управляемых координат
Определяются координаты груза в полярной системе координат, связанной с базовым шасси (значение координаты угла поворота q7 и вылета ρ). Используется схема, приведенная на рисунке 1, а, и зависимости для перевода декартовых координат в полярные на плоскости [9]:
|
|
|
|
|
|
xãð q1 2 |
zãð q3 2 ; |
(1) |
|
Вестник СибАДИ, выпуск 2(20), 2011 |
71 |
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И СИСТЕМЫ АВТОМАТИЗАЦИИ ПРОЕКТИРОВАНИЯ
|
|
z |
гр |
q |
3 |
|
|
|||
arctg |
|
|
|
|
|
|
|
|||
|
x |
гр |
q |
|
|
|
|
|||
|
|
|
|
1 |
|
|
|
|
||
|
z |
гр |
q |
3 |
|
|
||||
arctg |
|
|
|
|
|
|
|
|||
xгр |
q1 |
|||||||||
|
|
|
|
|||||||
q6,7 |
|
|
|
|||||||
|
|
z |
гр |
q |
3 |
|
|
|||
arctg |
|
|
|
|
|
|
|
|||
|
x |
|
q |
|
|
|
||||
|
|
|
гр |
|
1 |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
||
при xгр |
q1 0 |
; |
|
|
|
при xгр |
q1 0 |
, zгр |
q3 0; |
||
|
|
|
|
|
(2) |
при xгр |
q1 0 |
, zгр |
q3 0; |
||
при xгр |
q1 |
0, zгр |
q3 |
0; |
|
при xгр |
q1 |
0 |
, zгр |
q3 |
0. |
Отсюда, при известном значении q6:
q7 q6,7 q6 .(3)
2. Определяются максимальные и минимальные значения диапазонов управляемых координат грузоподъемного крана [q8В q8Н]; [q9В q9Н].
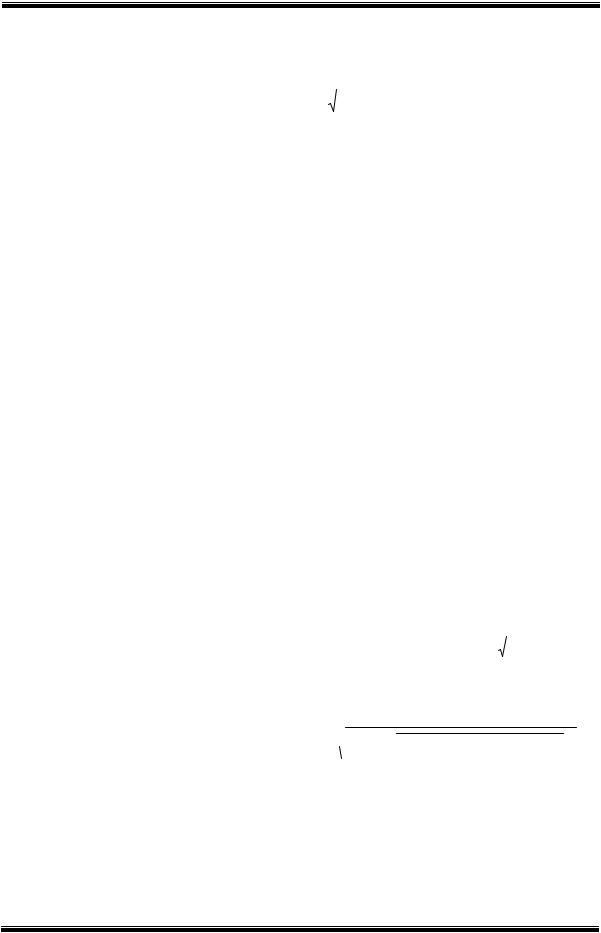
2.1. Для этого определяются значения вылета стрелы ρ, соответствующие четырем возможным сочетаниям максимальных и минимальных допустимых конструкцией грузоподъемного крана значений координат q8 и q9 (точки 1, 2, 3, 4 положения оголовка стрелы, рисунок 2):
Точка 1 (ρ=ρ1): q8 q8max ; q9 q9min ;(4)
Точка 2 (ρ=ρ2): q8 q8max ; q9 q9max ;(5)
Точка 3 (ρ=ρ3): q8 q8min ; q9 q9min ;(6)
Точка 4 (ρ=ρ4): q8 q8min ; q9 q9max .(7)
Для каждого сочетания значений q8 и q9 используется последовательность вычислений:
|
|
|
y4,43 |
|
|
q |
|
arctg |
|
; |
|
8,1 |
|
||||
|
|
|
|
|
|
|
|
x3,33 q9 |
|
|
|
R2,5 |
x3,33 q9 |
2 y4,43 |
2 ; |
(8) |
|
q8,2 |
q8 q8,1 ; |
|
|
R2,5 cos q8,2 |
x1,2 |
|
(9) |
|
По (8) – (9) определяются последовательно 4 постоянных значения: ρ1, ρ2, ρ3, ρ4.
2.2. По заданному текущему значению ρ определяются граничные значения диапазонов управляемых координат [q8В q8Н]; [q9В
q9Н].
При ρ1≤ρ<ρ2:
|
|
|
|
|
y |
|
|
|
|
|
|
|
x1,2 |
|
|
|
|
|
|
||
|
|
|
|
4,43 |
|
|
|
|
|
|
|
|
|
|
|||||||
q8B |
q8max ;q8H |
arctg |
|
|
|
|
arccos |
|
|
|
|
|
|
|
|
|
; |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
2 |
|
|
|
|
2 |
|
|||||||||||
|
|
|
|
|
|
q |
|
|
|
|
y |
x |
|
q |
|
|
|
|
|||
|
|
|
|
x3,33 |
9min |
|
|
4,43 |
3,33 |
9min |
|
|
|
(10) |
|||||||
|
|
|
x1,2 |
|
|
|
sin q8max |
|
|
|
|
|
|
|
|||||||
q9H |
q9min ;q9B |
|
y4,43 |
. |
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
cos q9max x3,33 |
|
|
|
|
|
|
|
|
|
|
|||||||
При ρ2≤ρ<ρ3:
|
|
|
|
|
|
|
|
y4,43 |
|
|
|
|
|
|
x1,2 |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
q9B |
q9max ;q8B |
arctg |
|
|
|
|
arccos |
|
|
|
|
|
|
|
|
|
; |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
2 |
|
|
2 |
|
|
||||||||||||||||
|
|
|
|
|
|
|
x |
3,33 q9max |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
y4,43 |
x3,33 |
q9max |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(11) |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
y4,43 |
|
|
|
|
x1,2 |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
q |
|
q |
|
;q |
|
arctg |
|
|
|
arccos |
|
|
|
|
|
|
|
|
. |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
9H |
|
9min |
|
8H |
|
x |
3,33 q9min |
|
|
2 |
|
|
2 |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
y4,43 |
x3,33 |
q9min |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
72 |
Вестник СибАДИ, выпуск 2 (20), 2011 |
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И СИСТЕМЫ АВТОМАТИЗАЦИИ ПРОЕКТИРОВАНИЯ
При ρ3≤ρ≤ρ4:
|
|
y4,43 |
|
|
|
|
|
|
|
x1,2 |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
q8B |
arctg |
|
|
|
arccos |
|
|
|
|
|
|
|
|
|
|
; |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
2 |
|
|
|
|
|
2 |
|
||||||||||
|
|
|
|
|
|
|
|
y |
x |
|
q |
|
|
|
|
|
||||
|
x3,33 q9max |
|
|
|
|
|
4,43 |
3,33 |
9max |
|
|
|
(12) |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
q8H |
q8min ;q9B |
q9max ;q9H |
|
x1,2 |
y4,43 |
sin q8min |
. |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
cos q8min x3,33 |
|
|
|
|
|
|
|
|||||
В случае если значение вылета стрелы ρ находится вне интервала конструктивно допустимых значений:
1; 4 , |
(13) |
делается вывод о невозможности обеспечить требуемые координаты груза при текущем положении базового шасси автокрана, алгоритм завершает свою работу.
2.3. По текущему значению ρ и граничным значениям координат [q8В q8Н]; [q9В q9Н] определяются граничные значения диапазона управляемой координаты [q10В q10Н].
1; 4 , используя (8), вычисляется:
|
|
|
|
|
y |
4,43 |
|
x1,2 |
.(14) |
y |
5,7 tg |
|
arctg |
|
|
|
|
||
q8 |
|
|
q9 |
|
|||||
|
|
|
|
x3,33 |
|
|
|
||
Согласно схеме рисунок 1, б
q10 y5,7 |
y6,7 y5,7 yrp |
y0,7 |
||||||
y5,7 yrp q2 |
y1,2 |
|
|
|||||
|
|
|
|
y4,43 |
|
|
(15) |
|
tg q |
|
arctg |
|
|
|
|
||
8 |
|
|
|
|||||
|
|
|
|
|
|
|
||
|
|
|
x3,33 q9 |
|
||||
x1,2 |
yrp |
q2 y1,2 , |
||||||
где y4,43 x3,33 x1,2 y1,2 – постоянные конструктивные значения.
Соответственно, значения [q10В q10Н] определятся по формулам:
|
|
|
|
y4,43 |
|
|
|
x1,2 yrp |
q2 |
|
; |
|
q10H |
tg q |
|
arctg |
|
|
|
y1,2 |
|||||
8H |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x3,33 q |
9H |
|
|
|
|
||||
|
|
|
|
y4,43 |
|
|
x1,2 yrp |
q2 |
|
. |
||
q10B |
tg q |
|
arctg |
|
|
|
y1,2 |
|||||
8B |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
x3,33 q9B |
|
|
(16) |
||||||
|
|
|
|
|
|
|
|
|
|
|
||
2.4. В случае если полученное по (16) значение q10В меньше минимальной конструктивно возможной длины грузовой лебедки от оголовка стрелы:
q10B q10min , |
(17) |
делается вывод о невозможности обеспечить требуемые координаты груза, алгоритм завершает свою работу.
Если выполняется условие
q10B q10min q10H q10min , |
(18) |
где – знак логического умножения (конъюнкции), т.е. точка подвеса груза расположена внутри пространства возможных положений оголовка стрелы, q10Н корректируется:
q10H q10min . |
(19) |
После этого также последовательно корректируются значения q9Н и q8Н по (22) и (21) с подстановкой значения q10Н.
3. По значению одной из управляемых координат (q8, q9, q10), заданному внутри соответствующего диапазона [q8В q8Н], [q9В q9Н], [q10В q10Н], определяются значения двух оставшихся управляемых координат.
Задана координата q8
|
q9 |
|
x1,2 |
y4,43 |
sin q8 |
; |
(20) |
|
|||||||
|
|
cos q8 |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
x3,33 |
|
|
|
|
|||
|
q10 определяется по (15). |
|
|
|
|
|
|
||||||||
|
Задана координата q9 |
|
|
|
|
|
|
|
|||||||
|
|
|
|
y4,43 |
|
|
|
|
|
x1,2 |
|
|
|||
|
|
|
|
|
|
|
|
|
|||||||
q8 |
arctg |
|
|
|
|
|
|
arccos |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
2 |
|
|
2 |
||||||
|
|
x |
|
|
q |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
y4,43 x3,33 |
q9 |
|
|||||
|
|
3,33 |
|
|
9 |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(21) |
|
q10 определяется по (15). Задана координата q10
q9 
 y4,432
y4,432 
 q10 yrp q2 y1,2 2 x1,2 2 2 x3,33
q10 yrp q2 y1,2 2 x1,2 2 2 x3,33
(22)
q8 определяется по (21).
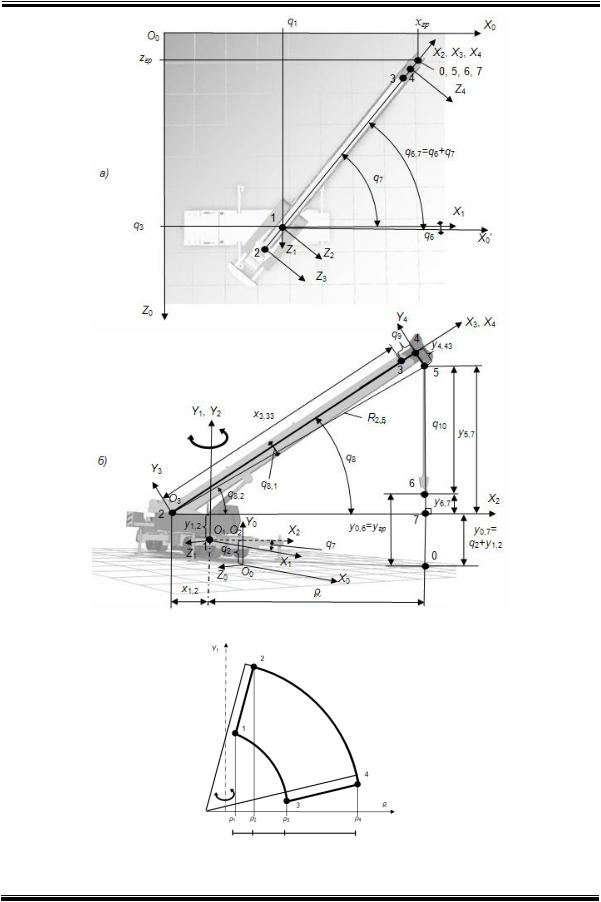
Блок-схема алгоритма определения значений управляемых координат грузоподъемного крана при нулевых углах наклона шасси приведена на рисунке 3.
Вестник СибАДИ, выпуск 2(20), 2011 |
73 |
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И СИСТЕМЫ АВТОМАТИЗАЦИИ ПРОЕКТИРОВАНИЯ
Рис. 1. Схема для определения управляемых координат грузоподъемного крана
Рис. 2. Диапазон вылета стрелы грузоподъемного крана
74 |
Вестник СибАДИ, выпуск 2 (20), 2011 |
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И СИСТЕМЫ АВТОМАТИЗАЦИИ ПРОЕКТИРОВАНИЯ
Рис. 3. Блок-схема алгоритма определения значений управляемых координат грузоподъемного крана
Вестник СибАДИ, выпуск 2(20), 2011 |
75 |

МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И СИСТЕМЫ АВТОМАТИЗАЦИИ ПРОЕКТИРОВАНИЯ
Заключение. Рассмотренный алгоритм позволяет вычислять управляемые координаты грузоподъемного крана для заданного положения груза при нулевых углах наклона шасси. Позволяет в автоматизированном режиме решать обратную задачу кинематики грузоподъемного крана. Алгоритм может использоваться при планировании траекторий перемещения груза, при решении задач кинематического анализа и синтеза конструктивных параметров грузоподъемного крана и технологических параметров его рабочего процесса.
Библиографический список
1.Щербаков В.С. Система автоматического выравнивания опорной платформы строительной машины в горизонтальной плоскости / В.С. Щербаков, М.С. Корытов, М.Г. Григорьев // Вестник Воронежского государственного технического университета, 2010. – Т.6. – № 2. – С. 88-92.
2.Щербаков В.С. Алгоритм работы системы автоматического горизонтирования опорной платформы строительной машины / В.С. Щербаков, М.С. Корытов, М.Г. Григорьев // Вестник Воронежского государственного технического университета, 2010. – Т.6. – № 3. – С. 88-91.
3.Щербаков В.С. Метод автоматического подъема, выравнивания опорной платформы строительной машины в горизонтальной плоскости
иконтроля отрыва выносных опор от грунта / В.С. Щербаков, М.С. Корытов, М.Г. Григорьев // Известия высших учебных заведений. Поволжский регион. Технические науки. – 2010. – № 1. – С. 146-154.
4.Щербаков В.С. Синтез алгоритма автоматического подъема и горизонтирования опорной платформы строительной машины / В.С. Щербаков, М.С. Корытов, М.Г. Григорьев // Мехатроника, автоматизация, управление. – 2010. – № 7. – С. 5663.
5.Информационный ресурс «Алгоритм автоматического выравнивания опорной платформы строительной машины в горизонтальной плоскости
иконтроля отрыва выносных опор от грунта»: свидетельство о регистрации электронного ресурса ОФЕРНИО № 15275 / В.С. Щербаков, М.С. Корытов, М.Г. Григорьев. Инв.номер ВНТИЦ № 50201000260; заявл. 27.01.2010; опубл. 24.02.2010. Алгоритмы и программы № 1, 1 с.
6.Пат. 94220 РФ, МПК В 66 С 23/80, В 66 С 5/00. Устройство автоматического выравнивания опорной платформы в горизонтальной плоскости / Щербаков В.С., Корытов М.С., Григорьев М.Г.; зая-
витель и патентообладатель ГОУ «СибАДИ». – № 2009147434/22; заявл. 21.12.09; опубл. 20.05.10, Бюл. № 14. – 3 с.
7.Пат. 2196893 Российская Федерация, МПК
Е21 В 44/00, Е 21 В 7/02. Способ автоматического горизонтирования несущей платформы с буровым агрегатом и устройство для его реализации / Сидоров И.А., Чухлебов В.Н. N 2001111382/03; заявл. 24.04.01; опубл. 20.01.03, Бюл. N 2. 2 с.
8.Пат. 2342310 Российская Федерация, МПК B 66 C 5/00, B 66 C 23/78. Устройство автоматического выравнивания опорной платформы / Великанов А.В., Иванищев П.И., Танчук П.В., Нилов В.А. N 2007115362/11; заявл. 23.04.07; опубл. 27.12.08, Бюл. N 36. 5 с.
9.Гельфанд, И.М. Метод координат / И.М. Гельфанд, Е.Г. Глаголева, А.А. Кириллов. – М.: Наука, 1973. – 88 с.
TECHNIQUE OF SOLVING INVERSE KINEMATICS PROBLEM FOR THE LIFTING CRANE
V.S Sherbakov, M.S. Korytov, S.V. Kotkin
Article is devoted a question of definition of values of operated coordinates of the lifting crane at the given coordinates of cargo.
Щербаков Виталий Сергеевич – д.т.н., профессор, декан факультета «Нефтегазовая и строительная техника» ГОУ ВПО «СибАДИ». Основное направление научных исследований – совершенствование систем управления строительных и дорожных машин. Общее количество публикаций – более 200.
E-mail: sherbakov_vs@sibadi.org.
Корытов Михаил Сергеевич – к.т.н., доцент, докторант ГОУ ВПО «СибАДИ». Основное направление научных исследований – автоматизация рабочих процессов мобильных грузоподъемных машин. Общее количество публикаций – бо-
лее 90. E-mail: kms142@mail.ru.
Котькин Станислав Вячеславович – аспирант кафедры «Автоматизация производственных процессов и электротехника» ГОУ ВПО «СибАДИ». Область научных интересов – автоматизация рабочих процессов мобильных грузоподъемных машин. Имеет 7 публикаций.
E-mail: kotkin.s@gmail.com.
76 |
Вестник СибАДИ, выпуск 2 (20), 2011 |

ЭКОНОМИКАИУПРАВЛЕНИЕ
РАЗДЕЛ IV
ЭКОНОМИКА И УПРАВЛЕНИЕ
УДК 338.47:656
О СИСТЕМЕ ПОКАЗАТЕЛЕЙ ОЦЕНКИ РЕЗУЛЬТАТИВНОСТИ ВЗАИМОДЕЙСТВИЯ ПРЕДПРИНИМАТЕЛЬСКИХ СТРУКТУР В ЦЕПИ ПОСТАВКИ
С.М. Мочалин, В.В. Чувикова
Аннотация: В статье приведена авторская система интегрированных показателей оценки результативности взаимодействия предпринимательских структур в цепи поставок (ЦП).
Ключевые слова: показатели, цепь поставок результативность, система
Введение. Современный период развития экономики является динамичным, связанным с различными переменами, кризисами, утратами
ииздержками.
Всложившейся экономической ситуации одним из инструментов, позволяющим достичь конкурентных преимуществ, является интеграция взаимодействия предпринимательских структур, связанных между собой материальными, информационными и финансовыми потоками в единую интегрированную систему. В работах многих ученых [1, 5, 9, 11] рассматриваются системы показателей оценки эффективности и результативности компании. Однако, в настоящий момент, является слабо проработанным вопросом оценка результативности взаимодействия предпринимательских структур в цепи поставок, цепи создания ценностей.
Новизной предложенного подхода является интегрированная оценка результативности цепи поставок. Как оценить результативность и эффективность отдельных компаний известно, однако, как оценивать систему взаимодействующих компаний предпринимательских структур в ЦП, этот вопрос слабо проработан.
Для оценки необходима система взаимодействующих интегрированных показателей результативности логистической деятельности, которые с разных сторон характеризуют ее результаты.
Оценка результативности взаимодействия предпринимательских структур в цепи поставок представляет собой процедуру, основанную на системе интегрированных показателей как более объективно оценивающие результаты взаимодействия предпринимательских структур в цепи поставок:
1.Степень использования парка автомобильного транспорта.
2.Объем поставки.
3.Объем недопоставок.
4.Длительность обслуживания заказа.
5.Надежность цепи поставки.
6.Объем утилизированного товара.
7.Гибкость цепи поставки.
8.Степень изменения затрат в цепи по-
ставки.
9.Степень изменения цен.
10.Количество претензий на всей цепи по-
ставок.
11.Своевременность поставок.
12.Регулярность поставок.
13.Показатель использования информационных технологий (ИТ).
14.Размер заказа.
15.Годовой объем спроса.
16.Процент заказов выполненных «точно в
срок».
17.Доход цепи поставки.
18.Прибыль цепи поставки.
19.Складские затраты.
20.Закупочные затраты.
21.Затраты на оформление заказов.
22.Затраты перевозчика.
23.Цена товара закупочная.
24.Цена реализации.
25.Прочие затраты.
Выбранные показатели с разных сторон характеризуют результаты деятельности при взаимодействии предпринимательских структур в цепи поставок, и объединяет в себе оценку по натуральным и стоимостным показателям, позволяя получить комплексную оценку результативности.
Вестник СибАДИ, выпуск 2 (20), 2011 |
77 |
ЭКОНОМИКАИУПРАВЛЕНИЕ
Основная часть. Данный перечень оценочных показателей не следует считать исчерпывающим, но он позволяет проводить оценку уровня результативности цепи поставки.
1. Степень использования парка автомобильного транспорта.
Данный показатель рассчитывается по формуле [7, с.37]:
и АДэ / АДи , |
(1) |
где АДи – инвентарные автомобиле-дни;
АДэ – автомобиле-дни в эксплуатации.
Величина и зависит от типа и марки ав-
томобилей, организации и качества выполнения технического обслуживания и ремонта подвижного состава, величины среднесуточного пробега, использования прицепов, дорожных и климатических условий, сезонности работы и различных причин организационного характера.
2. Объем поставки.
Показатель характеризуется величиной, структурой и временем выполнения. Объем поставки показывает количество тонн груза, которое доставлено потребителю.
Если рассматривается прямая цепь поставок, состоящая из трех звеньев: производитель, распределительный центр и торговая точка (конечный потребитель), то для расчета необходимо сопоставить производственные
мощности производителя (Wпр ва ), складские
мощности распределительного центра (Wрц )
и спрос в конце цепи поставок (С ), в случае если не выполняется условие Wпр ва Wрц С , то необходимо скорректи-
буется определить пропускную способность цепи поставок ( Пцп ).
Пропускная способность цепи поставок определяется минимальной величиной пропускной способности звена цепи. В свою очередь пропускная способность звена определяется по следующей формуле:
Пзв q zзв , |
(2) |
где q – грузоподъемность автомобиля, т;– коэффициент использования грузо-
подъемности;
zзв – количество машинозаездов в цен-
тральном грузовом пункте звена.
Т |
р |
|
|
|
zзв |
|
, |
(3) |
|
|
|
|||
Rзв |
|
|||
где Тр – время работы грузового пункта;
Rзв – ритм работы звена, ч.
Rзв max Rпостi ,Rпотрi , |
(4) |
где Rпотрi – ритм работы i-го потребителя,
ч;
Rпостi – ритм работы i-го поставщика, ч.
tразгр |
|
|
Rпотрi Nпостов разгр |
, |
(5) |
где tразгр – время, затрачиваемое на разгрузку у i-го потребителя, ч;
Nпостов разгр – число постов разгрузки у потребителя.
ровать план поставок продукции. Например, если Wпр ва Wрц , значит, складские мощно-
сти распределительного центра не соответствуют потребностям производителя;
Wпр ва С – производственные мощности не удовлетворяют потребительский спрос; Wрц С – складские мощности распредели-
тельного центра не могут создать необходимый запас для удовлетворения потребительского спроса и т.д.
Затем необходимо проверить возможность осуществить доставку продукции в указанные сроки и требуемом количестве, для чего тре-
tпогр |
|
|
Rпостi N постов погр |
, |
(6) |
где tпогр – время, затрачиваемое на погрузку у i-го поставщика, ч;
N постов погр – число постов погрузки у поставщика.
В соответствии с идеологией Д. Уотерс [11, с. 210], что пропускная способность определяется узким местом цепи поставок, то:
Пцп min Пзв1 ,Пзв2 |
....Пзвn , |
(7) |
Если условие Пцп Wпотр |
не выполняет- |
|
ся, то это означает невозможность осущест-
78 |
Вестник СибАДИ, выпуск 2 (20), 2011 |

ЭКОНОМИКАИУПРАВЛЕНИЕ
вить доставку продукции в требуемом количестве при существующих параметрах транспортной системы в цепи поставок [3].
3. Объем недопоставок.
Оценочный показатель относится к распространенным показателям логистического сервиса, методика расчета которого состоит из сравнения текущих результатов деятельности (операций и процессов) с прошлыми результатами аналогичной деятельности и/или с намеченными целевыми нормативами
[2, с. 596].
4. Длительность обслуживания заказа.
Определяет время прохождения груза по всей цепи поставок (поставщик-потребитель).
Показатель является мерой способности фирмы быстро откликаться на запросы потребителей, он необходим для оценки продолжительности всего процесса с позиций потребителя и сегментации его по элементам [2, с. 603].
В соответствии с методикой расчета, представленной в работе [4], длительность обслуживания заказа в прямой цепи поставок (поставщик-покупатель) может быть рассчитан по формуле
TO TП ТР ТТ ТС , (8)
где ТП – время, затрачиваемое на погруз-
ку товара, принимаемое одинаковым на всех погрузочных пунктах;
ТР – время, затрачиваемое на разгрузку
товара, принимаемое одинаковым на всех разгрузочных пунктах;
ТТ – продолжительность транспортировки товара;
ТС – время нахождения товара на скла-
де.
С участием распределительного комплекса в цепи поставок:
TPK TП ТТnc ТР ТС ТП1 ТТcp ТP1 , (9)
где ТП ,ТП1 – продолжительность погрузочных работ;
ТТnc – время транспортировки товара на этапе погрузка у поставщика – складирование; ТС – время нахождения товара на скла-
де;
ТТсp – время транспортировки товара на этапе складирование-разгрузка у потребителя; ТP,TP1 – продолжительность разгрузоч-
ных работ.
Длительность обслуживания автомобиля (ТТ ,TП ) грузоотправителя и грузополучателя определяется по формуле
T |
Tn Tn Tn Tn Tn Tn |
, (10) |
|||||
Т,П |
1 |
2 |
3 |
4 |
1 |
0 |
|
где T1n – длительности ожидания,
T0n – длительность обслуживания,
T2n – маневрирование,
T3n – погрузка или разгрузка,
T4n – оформление документов [8, с.75.].
5. Надежность цепи поставки.
«Надежность – свойство объекта сохранять значения установленных параметров функционирования в определенных пределах, соответствующих заданным режимам и условиям использования, обслуживания, хранения и транспортирования» [9].
Надежность прямой цепи поставок, при условии, если надежность всех звеньев цепи
одинакова, то P(S) P(Эi )n , определяется
как произведение надежностей всех участников этой цепи:
P(S) P(Э1) ... P(Э2 ) ... P(Эn) ,(11)
где P(S) – надежность цепи поставок;
P(Эi ) – надежность каждого элемента цепи поставок;
n – количество элементов цепи поставок. Надежность звена ЦП при резервировании
определяется по формуле
P(S) 1 (1 P(Э ))n |
, |
(12) |
i |
|
|
где P(S)– надежность звена ЦП при резервировании каналов;
P(Эi )– надежность основного и резерв-
ных каналов в звене ЦП.
Надежность звена, состоящего из основного и одного резервного канала составит:
P(З) 1 (1 0,95)4 0,99999375 (99,99%).
Соответственно, достаточно одного резервного канала наряду с основным поставщиком, т.е. на практике – параллельное функционирование основного и резервного каналов [9].
6. Объем утилизированного товара.
Показатель относится к транспортной деятельности, который выражается в количестве убытков и повреждений груза [11, с.294].
Вестник СибАДИ, выпуск 2 (20), 2011 |
79 |

ЭКОНОМИКАИУПРАВЛЕНИЕ
7. Гибкость цепи поставки.
Под гибкостью системы ЦП понимается ее способность поддерживать стабильность выходных параметров материальных, информационных (и финансовых) потоков, определяемых целевой функцией, несмотря на непредсказуемые дестабилизирующие воздействия окружающей среды. Понятие гибкости охватывает все составляющие системы.
Дестабилизирующими воздействиями могут быть изменения различных условий доставки груза. Гибкость системы может быть
рассчитана по формуле [8, с. 297]: |
|
||
G |
n |
100%, |
(13) |
|
|||
c |
m |
|
|
где Gc – гибкость системы;
n – число выполнимых изменений;
m– общее число требуемых изменений)
8.Степень изменения затрат в цепи поставки.
Показатель необходим для возможности осуществления процесса обслуживания (доставки) по более дешевым технологиям; оптимизацию затрат на доставку груза потребителю по всей цепи поставок.
Складывается из оценки величины затрат
впроцентах к объему поставки за отчетный период в динамике.
9.Степень изменения цены.
Степень изменения цены товара в конце цепи поставки и ее влияние на изменение спроса.
Расчетные методы определения показателя выражаются в определении отклонений/разницы изменения цен по прейскурантам, прайс-листам на доставку груза, а основанием является договор [8, с. 227].
10. Количество претензий на всей цепи поставок.
По данному показателю можно понять, насколько высок уровень претензий клиентов к предоставляемым его компанией услугам [1]:
P |
Qп |
, |
(14) |
|
Qo |
||||
|
|
|
где Qп – количество поставок, при дос-
тавке которого поступили претензии; Qo – общее количество поставок.
11. Своевременность поставок.
В работах [2, с. 596; 6, с. 12] отмечено, что одним из ключевых ресурсов цепи поставок является своевременность.
Своевременность это обслуживание потребителей в требуемые сроки. В работах Миротина Л. Б. [8, с. 298; 5, с.71] своевременность характеризуется сроками доставки.
Данный показатель может быть рассчитан как отношение фактическихtф и планируемых
сроков поставки tп :
S |
tф |
. |
(15) |
|
|||
|
tп |
|
|
12. Регулярность поставок.
Для того, чтобы удовлетворить требование потребителя, в условиях стабильного спроса, необходимо усвоить, что «не нужно создавать и хранить запасы, если есть возможность получать их по мере необходимости» [8, с. 226, 239], в соответствии с этим процесс поставки является предсказуемым и стабильным.
Регулярность поставок задается потребителем в соответствии с рассчитанным циклом управления запасом.
Данный показатель можно рассчитать путем анализа временных интервалов за отчетный период и объемов поставок как отношения фактических и плановых показателей:
-определяются плановые и фактические значения показателей ( xф,хп );
-находится разность между фактическим и плановым значением;
-определяется количество интервалов, ко-
торое должно стремится к числу
k1 3,3 gN [13];
-определяется значение интервала (по формуле Стерджеса) [13]:
|
|
x |
|
|
xф xп |
, |
(16) |
|
|
k |
1 3,3 gN |
||||||
|
|
|
|
|
||||
- |
подсчитывается количество |
наблюдений |
||||||
- |
nj , находящийся в каждом интервале; |
|||||||
вычисляются частоты попадания наблю- |
||||||||
|
дений в каждый интервал |
|
||||||
|
mj |
nj |
, |
j 1,2,...,k . |
(17) |
|||
|
N |
|||||||
|
|
|
|
|
|
|
||
Среднее значение показателя коэффициента регулярности поставок (учитывая, что
все величины nj находятся в определенном интервале) определяется по формуле
80 |
Вестник СибАДИ, выпуск 2 (20), 2011 |