

2519
.pdfМАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И СИСТЕМЫ АВТОМАТИЗАЦИИ ПРОЕКТИРОВАНИЯ
Рис. 4. Фундаментальные диаграммы альтернативных схем ОДД для улиц Лермонтова и Куйбышева
Рис. 5. Схема ОДД на пр. Маркса
Рис. 6. Фундаментальные диаграммы альтернативных схем ОДД для пр. Маркса
Заключение. С помощью разработанной имитационной модели движения автотранспортных потоков получены сравнительные оценки различных схем ОДД на примере г. Омска, которые могут быть использованы в
качестве исходных данных в процессе принятия управленческих решений. Среди задач моделирования могут быть и другие, например: оценка объёмов выбросов загрязняющих веществ автомобилями [1], оценка эффектив-
Вестник СибАДИ, выпуск 2(20), 2011 |
51 |

МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И СИСТЕМЫ АВТОМАТИЗАЦИИ ПРОЕКТИРОВАНИЯ
ности схем светофорного регулирования, оценка скорости сообщения и т.д. Широкий набор сфер применения делает данную модель универсальным средством, пригодным в качестве элемента систем управления дорожным движением.
Библиографический список
1.Долгушин Д.Ю., Мызникова Т.А. Имитационное моделирование дорожного движения для оценки экологического влияния автотранспорта // Системы управления и информационные технологии, 4.1(38), 2009. – С. 139-142.
2.Maerivoet S., De Moor B. Cellular Automata Models of Road Traffic // Physics Reports. 2005. Vol. 419, no. 1, Pp. 1-64.
3.Долгушин Д.Ю., Мызникова Т.А. Компьютерное моделирование движения городского автотранспорта // Материалы 64-й научно-технической конференции ГОУ “СибАДИ” в рамках Юбилейного Международного конгресса “Креативные подходы в образовательной, научной и производственной деятельности”, посвящённого 80-летию академии. – Омск: СибАДИ, 2010. Кн. 2 – С. 68-72.
4.Долгушин Д.Ю. Библиотека моделирования автотранспортных потоков “Трафика” // Хроники объединенного фонда электронных ресурсов “Наука
иобразование”, № 12 (19), 2010. URL:
УДК 004.93'1+004.354
http://ofernio.ru/portal/newspaper/ofernio/2010/12.doc (дата обращения: 28.03.2011).
TRAFFIC FLOW SIMULATION IN ESTIMATION OF ALTERNATIVE TRAFFIC MANAGEMENT SCHEMES IN CITY CONDITIONS
Dolgushin D.Y., Myznikova T.A.
The article contains the results of application of simulation model based on stochastic multilane traffic cellular automaton to the estimation of alternative traffic management schemes.
Долгушин Дмитрий Юрьевич – соискатель учёной степени кандидата технических наук, ин- женер-программист ЗАО “НПФ “ГЕО”. Основное направление научных исследований – моделирование автотранспортных потоков. Опубликовано 9
работ. E-mail: ddolgushin@yandex.ru
Мызникова Татьяна Александровна – кандидат технических наук, доцент кафедры “Прикладная информатика в экономике” ГОУ ВПО СибАДИ. Основное направление научных исследований – моделирование социально-эколого- экономических систем. Опубликовано 40 работ. E-mail: tmyzn@mail.ru
ИДЕНТИФИКАЦИЯ ПОЛЬЗОВАТЕЛЯ ПЭВМ ПО РУКОПИСНОМУ ПАРОЛЮ: КОНКУРЕНТНЫЕ ВОЗМОЖНОСТИ *
Б.Н. Епифанцев, П.С. Ложников, А.В. Еременко
Аннотация. В статье рассматривается задача формирования пространства информативных признаков для идентификации пользователя ПЭВМ по рукописному паролю. Предложен способ идентификации личности по рукописному паролю. Получены оценки информативности выбранных для идентификации признаков. Получено значение ошибки второго рода для разработанного метода распознавания. Приводится расчет стоимости аппаратного обеспечения в зависимости от показателя надежности разработанного метода (уровня ошибки второго рода)
Ключевые слова: идентификация, динамический биометрический признак, ошибка второго рода, графический планшет, верификация, критерий информативности
Введение. В настоящее время активно совершенствуются различные механизмы обеспечения информационной безопасности в корпоративных, ведомственных и домашних
сетях. Особенное внимание уделяется предотвращению несанкционированного доступа к информационным ресурсам и сервисам.
________________________________________________________________________________
* Работа выполнена в рамках реализации программы «Научные и научно-педагогические кадры инновационной России на 2009-2013 годы», контракт № П215 от 22.07.09г.
52 |
Вестник СибАДИ, выпуск 2 (20), 2011 |

МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И СИСТЕМЫ АВТОМАТИЗАЦИИ ПРОЕКТИРОВАНИЯ
Несмотря на значительный прогресс в этой области, наиболее слабым звеном в любой системе обеспечения безопасности остается человеческий фактор [1-3], а именно надежная идентификация пользователя.
По данным ФБР, более 70% случаев несанкционированного доступа к данным приходится не на внешние атаки, а на нарушения режима идентификации пользователя внутри организации. При реализации контроля доступа в большинстве случаев применяют раз-
личные комбинации парольных и аппаратных идентификаторов, реже биометрические данные. Вопросы использования паролей и ключей в достаточной степени проработаны, а проблемы эксплуатации давно известны. Биометрия в защите информации – относительно новое направление. На основании данных консалтинговой компании Acuity Market Intelligence составлена сводная характеристика наиболее распространенных методов биометрической идентификации, см. таблицу 1.
Таблица 1 - Характеристика методов биометрической идентификации
|
Средняя стоимость тер- |
Ошибка верификации |
|
Объект идентификации |
минального устройства, тыс. |
||
второго рода, % |
|||
|
руб. |
||
|
|
||
Отпечатки пальцев |
3 |
0,001 |
|
Изображение лица |
3 |
1 |
|
Радужная оболочка глаза |
15 |
0,0001 |
|
Геометрия ладони |
16 |
0,2 |
|
Голос |
2 |
1 |
|
Сетчатка глаза |
100 |
0 |
|
Подпись |
2 |
0,2 - 0,5 |
По данным той же организации за 2008 г., системы идентификации личности по рукописному паролю занимали 1% в структуре рынка коммерческих биометрических систем. Информация по ошибкам второго рода для данного вида систем противоречива. При этом прямой конкурирующей технологией принято рассматривать метод идентификации по отпечаткам пальцев. Цель работы состоит в том, чтобы внести определенность по данному вопросу - уточнить вероятность ошибки второго рода и стоимость необходимого аппаратного обеспечения для создания такой системы.
Основная часть. Достижение поставленной цели зависит от качества решения задачи выделения признаков и сжатия данных. Количество признаков, необходимое для успешного решения задачи распознавания, зависит от разделяющих качеств выбранных признаков. Задача выбора признаков усложняется обычно тем обстоятельством, что соответствующие возможности измерения важных признаков сдерживаются экономическими факторами, так функция измерения угла наклона пера к поверхности графического планшета заложена только в более дорогой профессиональной линейке графических планшетов. Доступными различительными признаками в этой ценовой категории являются: положение пера
в плоскости графического планшета x(t) и y(t), давление кончика пера на чувствительную к нажатию поверхность планшета p(t), угол наклона пера к плоскости графического планшета θ(t). На основе перечисленных функций строится пространство признаков.
Изучение свойств полученного пространства признаков проводилось с использованием нескольких видов анализа: корреляционного анализа первичных сигналов, ранжирования признаков по информативности. Для выполнения всех запланированных экспериментов была сформирована база данных рукописных паролей, для этого 10 пользователей с разной стабильностью почерка и периодом обучения работе с графическим планшетом зарегистрировали по 20 примеров своей подписи. Данные в таблице 2 дают представление о степени коррелированности функций.
Доверительные интервалы для полученных средних коэффициентов корреляции при доверительной вероятности 0,95 следующие:
Ixy = (-0,26 ; -0,094) – для m(rxy); Iyp = (0,106 ; 0,268) – для m(ryp);
Ixp = (0,247 ; 0,495) – для m(rxp); Iyθ = (0,083 ; 0,56) – для m(ryθ); Ixθ = (0,382 ; 0,775) – для m(rxθ); Ipθ = (0,235 ; 0,503) – для m(rpθ).
Вестник СибАДИ, выпуск 2(20), 2011 |
53 |
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И СИСТЕМЫ АВТОМАТИЗАЦИИ ПРОЕКТИРОВАНИЯ
Таблица 2 - Средние коэффициенты корреляции между сформированными при вводе рукописного пароля наборами биометрических данных
|
|
|
|
|
|
Пользователь |
|
|
|
|
|
|
|
|
|
1 |
2 |
3 |
|
4 |
5 |
6 |
|
7 |
8 |
|
9 |
10 |
|
|
-0,275 |
-0,111 |
-0,014 |
|
-0,15 |
-0,28 |
-0,325 |
|
-0,309 |
-0,079 |
|
-0,25 |
-0,229 |
|
|
0,21 |
0,566 |
0,28 |
|
0,447 |
0,336 |
0,666 |
|
0,364 |
0,162 |
|
0,166 |
0,509 |
|
|
0,834 |
0,77 |
0,508 |
|
0,721 |
0,348 |
0,772 |
|
-0,064 |
0,626 |
|
0,494 |
0,775 |
|
|
0,153 |
0,265 |
0,177 |
|
0,279 |
0,222 |
-0,068 |
|
0,185 |
0,178 |
|
0,12 |
0,358 |
|
|
-0,492 |
0,396 |
0,533 |
|
0,419 |
0,616 |
0,034 |
|
0,54 |
0,284 |
|
0,568 |
0,315 |
|
|
0,172 |
0,56 |
0,486 |
|
0,467 |
0,297 |
0,515 |
|
0,168 |
0,267 |
|
0,115 |
0,645 |
|
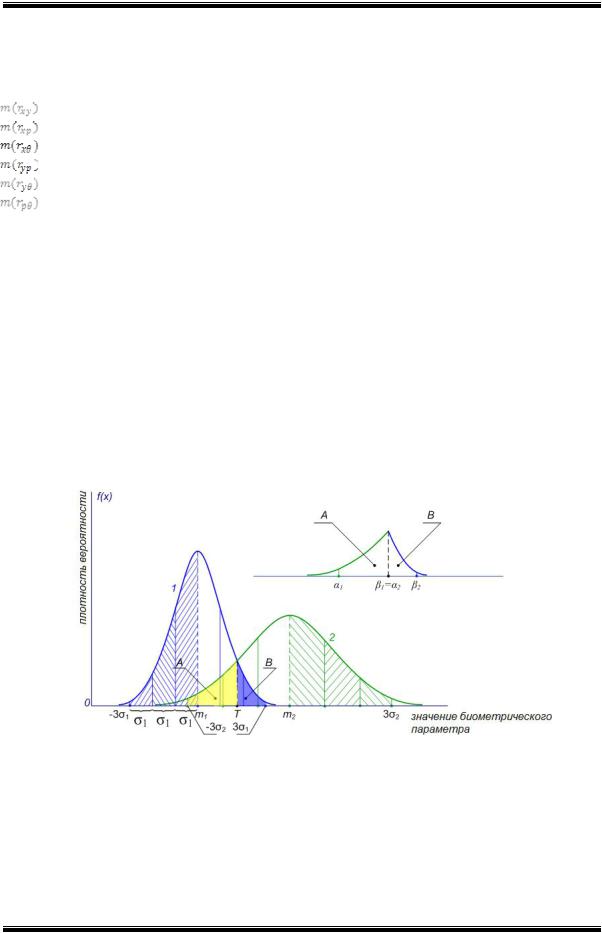
Данные таблицы 2 позволяют сделать |
функций x(t), y(t), p(t), θ(t) и производными от |
|||||||||||||
следующие выводы. Изменения угла наклона |
этих функций и определены площади пересе- |
|||||||||||||
θ(t) дублируются функциями x(t), y(t), p(t) и |
чения найденных плотностей распределения |
|||||||||||||
идентификационные возможности θ(t) незна- |
вероятностей. Площадь пересечения плотно- |
|||||||||||||
чительны. Что касается остальных функций, |
стей |
распределения |
вероятностей значений |
|||||||||||
каждая из них переносит отличающуюся ин- |
признака Q=A+B характеризует ошибки 1-го и |
|||||||||||||
формацию об особенностях автора подписи и |
2-го рода (см. рисунок 1, площади участков A |
|||||||||||||
должны анализироваться системой иденти- |
и B), которые могут быть допущены системой |
|||||||||||||
фикации подписантов. |
|
|
|
|
распознавания при его оценке, и служит кри- |
|||||||||
Степень отражения разноимёнными функ- |
терием информативности признаков. Для вы- |
|||||||||||||
циями информации о подписанте разная (m(rij) |
полнения вычислительных |
экспериментов |
||||||||||||
для разных субъектов заметно различаются). |
была сформирована база данных из 100 под- |
|||||||||||||
Степень различия — признак, идентификаци- |
писей: 10 пользователей с разной стабильно- |
|||||||||||||
онные возможности которого неизвестны. Для |
стью почерка и периодом обучения работе с |
|||||||||||||
снятия вопроса были построены плотности |
графическим планшетом зарегистрировали по |
|||||||||||||
распределения |
коэффициентов |
корреляции |
10 рукописных паролей. |
|
|
|||||||||
Рис. 1. Распределения вероятности для двух классов биометрического параметра
На основании полученных данных были отобраны 24 параметра, дающих степень пе-
рекрытия менее 50 %: rdxdy (19 %), rxdy (20 %), rdxdp (25 %), rxdx (26 %), rdydp (29 %), rydx (30 %), rxp (32 %), rxθ (33 %), rxdp (34 %), rydy (36 %), rydθ (36 %), rθdy (36 %), ryθ (37 %), rpdy (38 %), rθdx (38 %), rpθ (39 %), rxdθ (40 %), rpdx (43 %), rθdp (43 %), rdxdθ (43 %), rxy (44 %), ryp (46 %), rdydθ (47 %), rydp (48 %).
Функции x(t), y(t), p(t), θ(t) можно тракто-
вать как описание процессов, протекающих в интервале 0<t<T, соответствующем времени воспроизведения пароля. С целью упрощения обработки сигнала и устранения избыточности информации было принято решение о преобразовании сигналов из системы координат s(t) в систему координат S(ω) - зависимость амплитуды составляющих сигнал гар-
54 |
Вестник СибАДИ, выпуск 2 (20), 2011 |
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И СИСТЕМЫ АВТОМАТИЗАЦИИ ПРОЕКТИРОВАНИЯ
монических колебаний от частоты [4, 5]. В результате каждая из функций была представлена в виде ряда Фурье с конечным числом членов разложения 6 [6]. Дальнейшее наращивание размерности пространства признаков оказалось неэффективным ввиду соизмеримости амплитуд с сопутствующими шумами преобразования. Далее в ходе эксперимента были составлены эталоны для каждого из паролей 10 пользователей после аппроксимации распределения значений информативных признаков для 20 реализаций подписи нормальным законом [7]. Пользователи по 10 раз предъявляли системе каждый из своих 10 паролей, принадлежность которых классу «своих» необходимо проверить. Таким образом, было проведено 100 экспериментов, размер базы данных составлял 100 эталонов. Эксперимент проводился для эталонов, содержащих информацию о распределениях гармоник формируемых при вводе подписи сигналов. Принятие решения при этом опиралось на стратегию Байеса, в которой априорной вероятностью считается апостериорная вероятность, вычисленная на предыдущем шаге, а количество зарегистрированных эталонов соответствует количеству первоначально выдвигаемых гипотез о принадлежности предъявленного образца рукописного слова к какомулибо эталону [8]. В ходе эксперимента были получены следующие данные. Ошибка первого и второго рода составила 0,01 при ограничении количества эталонов в базе данных 40.
По своей сути метод распознавания, основанный на стратегии Байеса, лишь находит ближайший эталон к проверяемой подписи, но не способен различать «свои» и «чужие» для системы подписи. Снять вопрос удалось с использованием классической формулы вероятностей гипотез Байеса. Для вычисления этих вероятностей нужно знать априорные и апостериорные вероятности гипотез. С увеличением используемых признаков пропорционально увеличивается число вычисляемых вероятностей гипотез m x n, где m — число гипотез, n — число признаков. И задача сводится к реализации процедуры свёртывания m x n альтернатив к m вероятностям гипотез
P(Hi/Aj), j=1,2,…,m для j=n.
Рассмотрен следующий вариант решения поставленной задачи. Вероятности гипотез вычисляются по формуле
|
P(Г |
ij |
) P(A |
j |
/H |
) |
|
P(Hi / Aj ) |
|
|
i |
|
, |
||
m |
|
|
|
|
|
P(Гij ) P(Aj /Hi )
i 1
где P(Гij) играет роль априорных вероятностей гипотез при поступлении на вход системы идентификации j-го признака Aj. Она вычисляется по формуле
1
P(Гi1) m при j=1,
P(Гi2) P(Гi1) P(Hi / A1) при j=2, 2
j 1
P(Гij ) k 1 P(Hi / Av ), j k ,
v j k
k — интервал усреднения значений вероятностей гипотез, сформированных до появления признака с номером j. Иными словами, априорная вероятность гипотез при поступлении очередного признака определяется предысторией развития процесса идентификации на интервале k и аккумулирует в себя информацию о распределении вероятностей гипотез в прошлом.
При j=n процесс идентификации завершается анализом финальных вероятностей P(Hi/An). Выбором интервала усреднения k можно устранять случайные сбои в поведении кривых P(Hi/Aj).
Изменения стандартного алгоритма продиктованы выявленными в нём недостатками. При использовании в задачах идентификации биометрических образов классической формулы Байеса возможны сбои, которые способны привести к ошибке принятия решения (ошибке распознавания). Часто на очередном шаге работы стратегии Байеса вероятность некоторой гипотезы становится близкой по значению к единице, а вероятности оставшихся гипотез в сумме дают околонулевое значение, несмотря на то, что на предыдущем шаге одна из этих гипотез имела высокую вероятность и являлась правильным решением.
Для оценки надежности разработанного способа идентификации проводился эксперимент, в котором 100 раз была проведена попытка идентификации после включения в «собственные области» идентифицируемых паролей авторов корреляционных признаков. Также моделировалась попытка идентификации злоумышленником, пытающимся подделать подпись зарегистрированного пользователя. В результате были найдены ошибки первого и второго рода для среднестатистического пользователя.
Анализ дополнительной информации о динамике воспроизведения рукописного пароля и улучшенный метод распознавания по-
Вестник СибАДИ, выпуск 2(20), 2011 |
55 |

МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И СИСТЕМЫ АВТОМАТИЗАЦИИ ПРОЕКТИРОВАНИЯ
зволили снизить ошибку второго рода до 0,005 при уровне ошибки первого рода 0,03 и количестве эталонов в базе данных 80.
Выводы. Достигнутые результаты позволяют сделать вывод о правильном выборе подхода в решении задачи идентификации пользователя по динамике написания паролей. Указанные характеристики системы распознавания могут быть воспроизведены для сформированного пространства признаков на графических планшетах ценовой категории до 2 тыс. руб., измеряющих положение пера в плоскости графического планшета x(t) и y(t), давление кончика пера на чувствительную к нажатию поверхность планшета p(t), моделях графических планшетов, измеряющих угол наклона пера к плоскости графического планшета θ(t) (ценовая категория 10-15 тыс. руб.) [9]. Бюджетный вариант (ориентированный на дешевые графические планшеты) предложенной системы идентификации личности по рукописному паролю выглядит вполне конкурентоспособным по отношению к системам распознавания по отпечаткам пальцев в силу своей более низкой стоимости (см. таблицу 1) и положительного субъективного отношения к процедуре идентификации (отсутствие ассоциации с криминалистическими системами). Решение о выборе конкретной модели графического планшета будет приниматься конечным потребителем на основании найденного соотношения затраты/безопасность.
Библиографический список
1.Соколов И.А., Будзко В.И., Синицин И.Н. Построение информационнотелекоммуникационных систем высокой доступности // Наукоёмкие технологии. – 2005. - № 6. – Т. 6 // Системы высокой доступности. - 2005. - № 1. – Т. 1.
–С. 6-14.
2.Программно-аппаратные средства обеспечения информационной безопасности. Защита программ и данных: Учеб. пос. для вузов / Белкин П.Ю., Михальский О.О., Першаков А.С. и др. – М.: Радио и связь, 1999. – 168 с.
3.Болл Р.М., Коннел Д.Х., Панканти Ш. и др. Руководство по биометрии. – М.: Техносфера, 2007. – 368 с.
4.Гольденберг Л.М., Матюшкин Б.Д., Поляк М.Н. Цифровая обработка сигналов: Учебное пособие для вузов.– М.: Радио и связь, 1990.– 256 с.
5.Толстов Г.П. Ряды Фурье: Учебное пособие для вузов.– М.: Наука, 1980. – 347 с.
6.Еременко А.В. О нормализации пространства признаков в системах идентификации авторов по автографу // Научные исследования и их прак-
тическое применение. Современное состояние и пути развития ‘2010: сборник научных трудов по материалам международной научно-практической конференции. – Одесса: Изд-во Черноморье, 2010.
–Т. 2. – С. 63-66.
7.Вентцель Е.С. Исследование операций. Задачи, принципы, методология: Учеб. пособие для втузов. – 2-е изд., стер. – М.: Высш. шк., 2001. – 208 с.
8.Епифанцев Б.Н., Ложников П.С., Еременко А.В. Инфокоммуникационные системы и технологии: проблемы и перспективы: Монография. – Спб.: Изд-во Политехн. ун-та, 2007. – 592 с.
9.Ложников П.С., Еременко А.В. Идентификация личности по рукописным паролям // Мир измерений. – 2009. №4(98). – С. 11-17.
IDENTIFICATION OF COMPUTER USERS BY HANDWRITTEN PASSWORD: COMPETITIVE OPPORTUNITIES
B.N. Epifancev, P.S. Lozhnikov, A.V. Eremenko
The article considers a task of creating a space of informative characteristics to identify a computer user by a handwritten password. It suggests a method of personal identification by a handwritten password and demonstrates an assessment of distinguishing qualities for the selected characteristics and their ranking based on an information value. The article presents a false-reject rate for a developed method of identification. It shows a calculation for a cost of hardware depending on a reliability rate of the developed method (a false-reject rate).
Епифанцев Борис Николаевич – д-р техн. наук, профессор кафедры «Информационная безопасность» Сибирской государственной автомобиль- но-дорожной академии. Основное направление научных исследований – информационная безопасность. Имеет более 200 опубликованных работ. E-mail: epifancev_bn @ sibadi.org.
Еременко Александр Валериевич - ст. преподаватель кафедры «Информационная безопасность» Сибирской государственной автомобиль- но-дорожной академии. Основное направление научных исследований – технологии биометрической идентификации личности. Имеет 16 опубли-
кованных работ. E-mail: nexus-@mail.ru.
Ложников Павел Сергеевич - канд. техн. наук., доцент кафедры «Информационная безопасность» Сибирской государственной автомобильнодорожной академии. Основное направление научных исследований – технологии биометрической идентификации личности. Имеет 57 опублико-
ванных работ. E-mail: lozhnikov@gmail.com
56 |
Вестник СибАДИ, выпуск 2 (20), 2011 |
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И СИСТЕМЫ АВТОМАТИЗАЦИИ ПРОЕКТИРОВАНИЯ
УДК 621.865.8
ИЗУЧЕНИЕ ФУНКЦИОНИРОВАНИЯ РОБОТИЗИРОВАННЫХ СРЕДСТВ ОБЕСПЕЧЕНИЯ ПОДВИЖНОСТИ С ЦЕЛЬЮ ВЫЯВЛЕНИЯ ДИНАМИКИ РАБОТОСПОСОБНОСТИ ОПЕРАТОРА
Д.В. Нефедов
Аннотация. В статье рассмотрены проблемы определения производительности системы «человек–машина». Предложена математическая модель производительности применительно к роботизированным системам обеспечения подвижности.
Ключевые слова: производительность, оператор, система «человек–машина».
Изучение функционирования роботизированных средств обеспечения подвижности (РСОП) с целью выявления динамики работоспособности оператора связано с возникающей проблемой проектной производительности системы «человек–машина». Для решения данной проблемы воспользуемся эволюционным (процессуальным) представлением. Основная цель данного представления выявление характера изменения производительности РСОП в различные моменты времени его работы t. При этом параметры технической системы Cm, Yj, характеристики внешних условий G1, факторы рабочей среды Zk и мотив М являются фиксированными величинами и функцию производительности следует определять в виде:
W(t) F(Qn;Xi;t) , |
(1) |
при Cm; Yj; G1; М; Zk = const.
Следует отметить, что характеристики режима работы Qn обеспечивают адаптацию технической системы к заданным условиям работы. Для большинства видов операций условия в пределах одного цикла изменяются в небольшом диапазоне, не требующем дополнительной настройки технической системы. Таким образом, технологические режимы можно считать постоянными (Qn техн = const). Скоростные режимы Qnскор обеспечивают поступление информационного материала и в процессе выполнения операционного цикла выступают в качестве регулируемого пара-
метра (Qn скор = var). Оператор вынужден одновременно контролировать и регулировать
траекторию движения и поток информационного материала.
Характеристики оператора в течение смены изменяются в зависимости от сложности возникающих задач, технической системы, факторов внешней среды, индивидуальными
характеристиками и в определенной степени определяются состоянием оператора в начальный момент времени. Это проявляется в изменении времени выполнения исполнительных действий и отражается в изменении составляющих баланса времени цикла. Изменение совокупности показателей состояния оператора происходит из-за изменения внутренних процессов и приводит к изменению его работоспособности и как следствие, происходит изменение производительности W(t).
Изменение производительности W(t) предопределяется закономерностью изменения
производной dw(t) . Скорость изменения dt
производительности является результатом двух внутренних процессов, происходящих в операторе.
С одной стороны, существуют факторы, стимулирующие рост производительности (поощрения, заинтересованность, материальное стимулирование, мотив как фактор самовыражения и др.) Эту тенденцию будем оценивать функцией стимула q+(x). Знак «+» отмечает тенденцию роста скорости изменения производительности. С другой стороны, по мере накопления усталости увеличивается влияние факторов тормозящих протекание психофизиологических процессов и способствующих снижению скоростных характеристик оператора. Отмеченные процессы приводят к снижению производительности. Данную тен-
денцию будем оценивать функцией f (x).
Отмеченные два процесса q+(x) и f (x)
протекают одновременно и влияют друг от друга. Первый процесс, характеризующийся ростом производительности q+(x), определяется мотивом, направленным на достижение (выполнение поставленной задачи) [1]. При этом мотив рассматривается как внутреннее побуждение человека к данной деятельности,
Вестник СибАДИ, выпуск 2(20), 2011 |
57 |
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И СИСТЕМЫ АВТОМАТИЗАЦИИ ПРОЕКТИРОВАНИЯ
сформированное потребностями личности, |
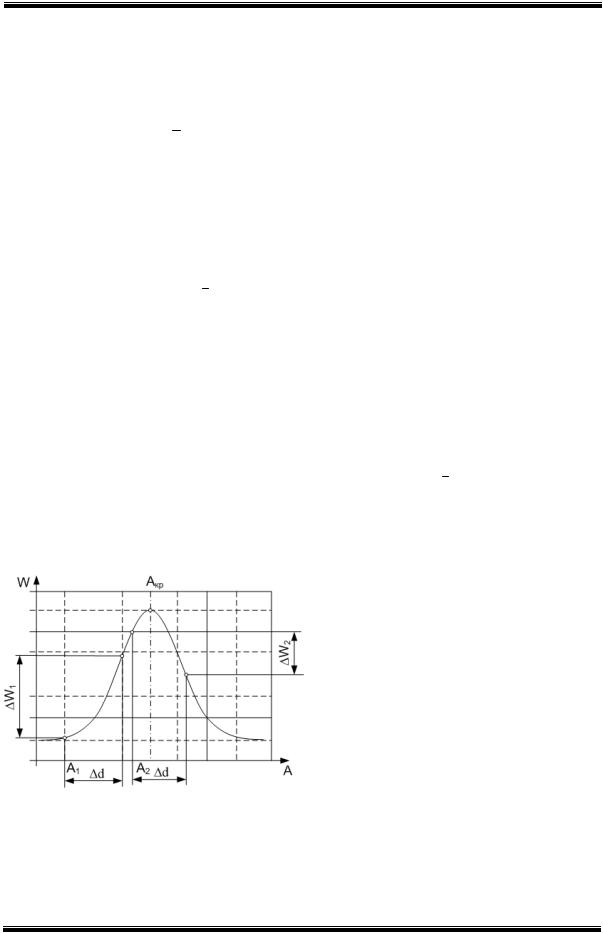
не дает положительного эффекта. Для значе- |
|||||||
мировоззрения, убеждения, идеалами и инте- |
ний активации А < Акр можно предположить |
|||||||
ресами личности, социальной ролью и уста- |
рост производительности пропорциональным |
|||||||
новками. Факторы, определяющие мотив дея- |
относительно увеличения стимула А. |
|
||||||
тельности определяются в основном внешни- |
При выполнении поставленной задачи в |
|||||||
ми идейно–личностными факторами. |
качестве стимула, определяющего рост произ- |
|||||||
Второй |
процесс |
f ( |
x |
) |
определяется |
водительности, выступает система мотивации, |
||
внутренними |
психофизиологическими факто- |
основанная на нормативном показателе W0. |
||||||
Тогда относительный прирост W очевидно |
||||||||
рами и индивидуальными особенностями ор- |
||||||||
можно принять пропорциональным |
произво- |
|||||||
ганизма. При одновременном воздействии |
дительности: |
|
||||||
факторов, влияющих на динамику работоспо- |
|
|||||||
собности, дифференциальная модель произ- |
q (x) kW , |
(3) |
||||||
водительности может |
быть |
представлена в |
||||||
виде:
dW |
q (x) f ( |
x |
) , |
(2) |
|
||||
dt |
|
|||
Данный вид модели основан на предположении совместного влияния отмеченных процессов.
Вид функции q+(x) определим на основе следующих предпосылок. Результат производительности оценивается объемом выполненных задач. Это основа для оценки результата, удовлетворенности и самоутверждения.
Динамику прироста выполненного объема задач оценивает функция производительности W(t). Активация мотива труда, приводящая к изменению производительности, достигается за счет весомости стимула. Зависимость производительности от уровня мотивации представляет нелинейную функцию и представлена общей закономерностью [2] (рисунок 1).
где k – коэффициент пропорциональности, характеризующий чувствительность оператора к стимулу.
Если k > 0, то это соответствует положительному росту производительности, при k = 0
– стимулирование не влияет на производительность, а при k < 0 – происходит снижение производительности из за недостаточного действия стимула для выполнения норматива или преобладает другая целевая установка (точность вождения).
Функцию представим в виде:
f ( |
х |
) B AWt , |
(4) |
где В и А – численные коэффициенты модели. Коэффициент В оценивает уровень начальной работоспособности. Окончательный вид модели получим подстановку выражения (3) и
(4) в (2):
dW |
kW B AWt . |
(5) |
|
||
dt |
|
|
После раскрытия скобок уравнение (5) примет вид:
dW |
kBW kAW 2t . |
(6) |
|
||
dt |
|
|
Обозначив произведение коэффициентов k, В и А через β = k ∙ B и α = k ∙ A, получим:
Рис.1. Зависимость продуктивности деятельности от уровня активации
При увеличении стимула от А1 до А2 происходит резкий рост производительности ΔW1. При достижении максимального значения активации Акр дальнейшее увеличение стимула
dW |
W W 2t . |
(7) |
|
||
dt |
|
|
Полученное выражение имеет вид уравнения Бернулли 2–го порядка [3]. Данное уравнение приводим к линейному виду путем подстановки. Для этого делим его на W2:
58 |
Вестник СибАДИ, выпуск 2 (20), 2011 |
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И СИСТЕМЫ АВТОМАТИЗАЦИИ ПРОЕКТИРОВАНИЯ
|
1 |
|
dW |
|
1 |
t . |
(8) |
C w t e tdt . |
(15) |
||
W |
dt |
|
|||||||||
|
W |
|
|
|
|
|
|
||||
|
|
|
|
|
|
Z |
1 |
|
|
Заменив x t, (dx dt) подста- |
|
Введем |
|
функцию |
. |
Тогда |
вим в уравнение (14): |
|
|||||
|
|
|
|||||||||
|
|
|
|
|
|
W |
|
|
|
||
dZ |
|
1 |
|
|
dW |
и уравнение (8) примет вид: |
||
|
W 2 |
|
|
|||||
dt |
|
|
dt |
|
||||
|
|
|
dZ |
Z t . |
(9) |
|||
|
|
|
|
|||||
|
|
|
dt |
|
||||
В ходе преобразований получим неоднородное уравнение первого порядка с неизвестной функцией Z. Проинтегрируем уравнение (9) методом вариации произвольной постоянной и найдем Z как функцию от W. Для этого решим сначала соответствующее ему однородное уравнение:
dZ |
Z 0 или |
dZ |
Z . (10) |
|
|
||
dt |
dt |
||
C w |
|
x exdx. |
(16) |
2 |
|||
|
|
|
|
Определим интеграл методом интегрирования по частям: [2]
C w |
|
x 1 ex C2 C1 , |
(17) |
|
2 |
||||
|
|
|
где С1 и С2 – константы интегрирования. Подставив вместо x t, получим:
C w 2 t 1 e t C2 C1. (18)
Полученное выражение для С(w) подставим в уравнение (12)
Разделим обе части на Z и умножим на dt, а затем проинтегрируем полученное уравнение:
ln Z t lnC или Z C e t . (11)
Произвольное постоянное С(w) представляет собой некоторую функцию. Для того, чтобы получить решение уравнения (9) необходимо подобрать функцию С(w). Для этого вычислим производную функции Z (11):
dZ dC w e t C w e t , (12) dt dt
|
|
|
|
Z e t |
|
|
t 1 e t C2 C1 . (19) |
|
|||
|
2 |
|
|
Константы интегрирования С1 и С2 определим из начальных условий. При t = 0 значе-
ние Z = Z0 = C1, C2 = 1
Подставим Z, C1 и C2 в уравнение (17):
1 |
e t |
|
|
t 1 e t |
1 |
1 |
|
|
|
. (20) |
|||||||
W |
2 |
W0 |
||||||
|
|
|
|
|
Путем дальнейших преобразований получим:
далее подставим |
dZ |
и Z в (9): |
|
|
W0 2 e t |
|
|
|
dt |
W |
|
|
, (21) |
||||
|
|
|
|
|
||||
dC w |
e t C w e t C w e t |
W0 |
t 1 e t |
1 2 |
||||
t |
|
|
|
|||||
|
|
|
|
|||||
dt |
|
или с учетом принятых обозначений: |
||||||
|
|
|
(13) |
|
|
|
|
|
После преобразования получим: |
|
|||
|
dC w |
e t |
t. |
(14) |
|
|
|||
|
dt |
|
|
|
Решение уравнения (14) позволяет получить:
W |
W0 k B2 ek B t |
A W0 ek B t k B t 1 1 k B2 . (22) |
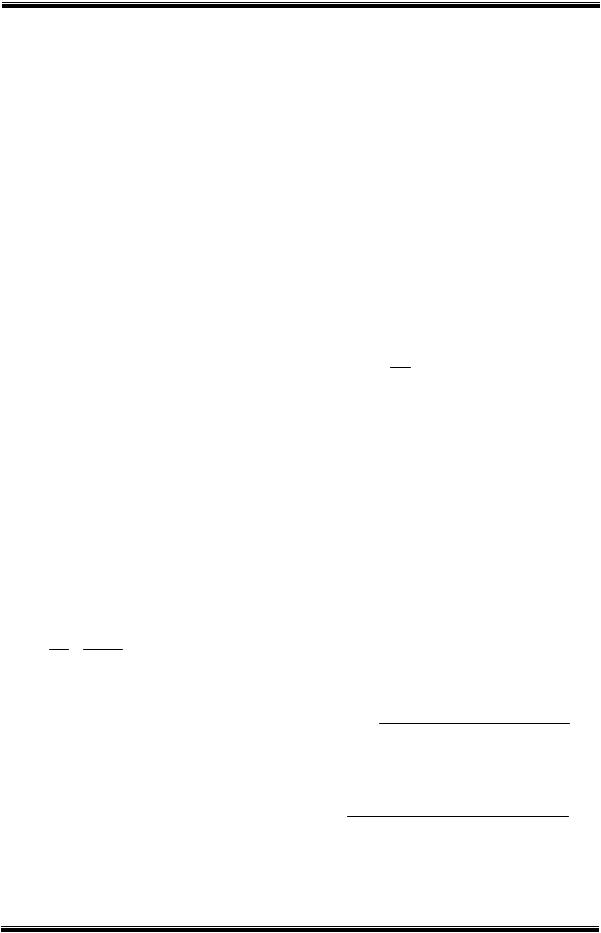
Уравнение (20) представляет собой решение дифференциальной модели производительности. При k > 0, B > 0 и A >0 зависимость
Вестник СибАДИ, выпуск 2(20), 2011 |
59 |
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И СИСТЕМЫ АВТОМАТИЗАЦИИ ПРОЕКТИРОВАНИЯ
производительности от времени имеет явно выраженный максимум (рисунок 2).
Рис. 2. Зависимость производительности от времени
Рассмотрим характер изменения производительности (20) в зависимости от значений коэффициентов k, A и B.
Производительность достигает наиболь-
шего значения Wmax при dW 0 , что возмож- dt
B
но при Wmax tW max A . При t = 0 производи-
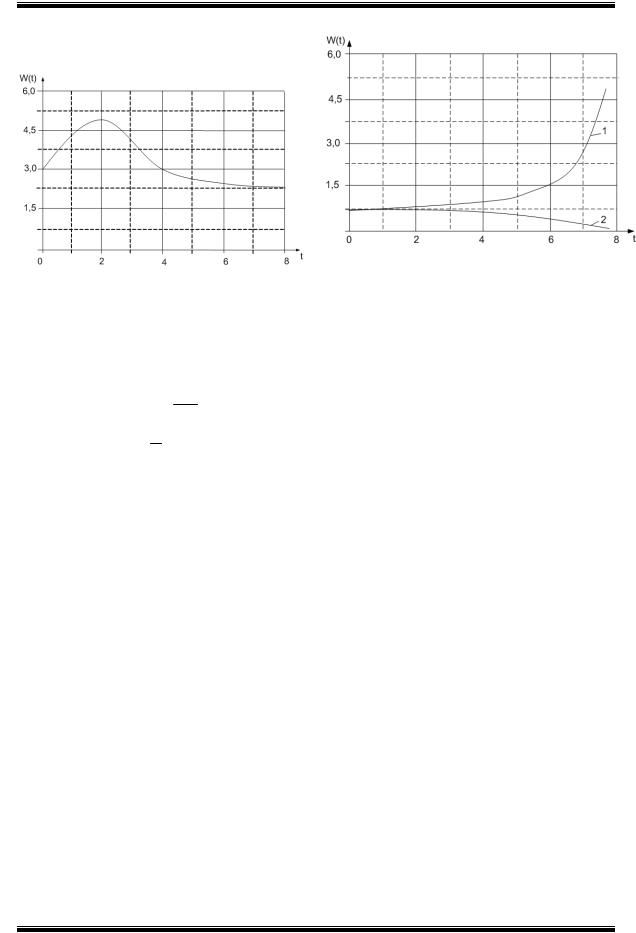
Рис. 3. Зависимость производительности от времени при
В = 0, А > 0 и l – k > 0; 2 – k < 0
Библиографический список
1.Кравченко Р.Г. Автоматизированная система управления в сельском хозяйстве. – М.: Ко-
лос, 1975. – 78 с.
2.Кульбак С.В. Теория информации и статистика. Пер. с англ. Д.И. Гордеева, А.В. Прохорова Под. Ред. А.Н. Колмогорова. – М.: Наука, 1967. – 408 с.
3.Кутьков Г.М. Технологические основы и тяговая динамика мобильных энергетических средств. М.:МГАУ, 1992. – 154 с.
W |
2W0 |
|
|
. |
|
2 k A W t2 |
||
|
0 |
|
STUDYING OF FUNCTIONING OF THE
ROBOTIZED MEANS OF MAINTENANCE OF
(23) MOBILITY FOR THE PURPOSE OF
REVEALING OF DYNAMICS OF WORKING
CAPACITY OF THE OPERATOR
График полученной функции представлен на рисунке 3.
В зависимости от значения коэффициента k график функции (21) может возрастать или уменьшаться. При k > 0 производительность будет расти, а при k < 0 уменьшаться.
Таким образом, учет взаимного влияния изложенных факторов в представленной модели помимо определения производительности РСОП дает возможность проектировать системы «человек–машина» с учетом динамики изменения работоспособности оператора в течение рабочего времени.
D.V. Nefedov
The article considers the problem of determining the productivity of the system "manmachine". A mathematical model of productivity in relation to robotic systems mobility.
Нефёдов Дмитрий Владимирович – канд. техн. наук, доцент, начальник кафедры Двигателей Омского танкового инженерного института имени Маршала Советского Союза П.К. Кошевого филиала Военного учебно-научного центра Сухопутных войск «Общевойсковая академия ВС РФ». Основное направление научных исследований: автоматизация двигателестроения, системы управления. Имеет 30 опубликованных работ.
E-mail: tesa1978@mail.ru
60 |
Вестник СибАДИ, выпуск 2 (20), 2011 |