

2334
.pdfРис. 3.1. Определение критерия эффективности
На рис. 3.1 схематично показана платформа строительной машины, которая имеет наклон по осям X и Y. Векторная сумма углов наклона αx и αy будет образовывать результирующий угол наклона αz (рис. 3.2). Согласно требованиям безопасности наклон платформы в горизонтальной плоскости для большинства строительных машины должен составлять αz ≤ 3° [34, 35].
Рассмотрим расчетную схему OB, представленную на рис. 3.2:
|
|
OBx OBy |
Obz a; |
|
|
|
|
|
|
(3.3) |
|||||||
|
|
|
|
|
AxBx tg x a; |
|
|
|
|
|
|
(3.4) |
|||||
|
|
|
|
AyBy tg y a; |
|
|
|
|
|
|
(3.5) |
||||||
|
|
|
z |
arctg |
AzBz |
; |
|
|
|
|
|
|
(3.6) |
||||
|
|
|
|
|
|
|
|
|
|||||||||
|
2 A B |
|
2 A B |
2 |
a |
|
|
|
|
|
|
|
|||||
A B |
|
2 A B |
x |
A B |
y |
cos . |
(3.7) |
||||||||||
z |
z |
|
x |
x |
y |
y |
|
x |
y |
|
|
|
|||||
Подставим в формулу (3.6) формулы (3.4), (3.5) и (3.7): |
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||
z arctg |
|
tg2 x |
tg2 y |
2 tg x tg y cos ; |
(3.8) |
||||||||||||
|
z |
|
|
|
|
|
. |
|
|
(3.9) |
|||||||
|
|
x |
y |
2 x y cos |
|
|
|||||||||||
|
|
|
|
|
|
|
40 |
|
|
|
|
|
|
|
|
||
Z |
Z’ |
|
|
Bz |
Az |
Ay |
|
|
Z |
|
|
|
|
Y |
|
|
|
|
|
αz |
|
|
|
|
Ax |
Az |
|
|
|
|
|
|
|
X |
|
|
|
By |
|
О |
|
αy |
Y |
γ |
|
Ay |
Y’ |
|
|
αx
Bx
 X
X
 Ax
Ax
 X'
X'
Рис. 3.2. Расчетная схема для нахождения αz
Основным требованием к устройству управления платформой строительной машины является точность и быстродействие устройства управления. Таким образом, в качестве критерия эффективности было принято быстродействие устройства управления при обеспечении заданной точности:
tпп → min |
(3.10) |
при |
|
αz ≤ αzзад. |
(3.11) |
Также необходимо учитывать ограничения, налагаемые на систему управления:
1. Сила нормальной реакции на i-й опоре Ri ≥ Rmin:
Ri = pпi Sпi – pшi (Sпi – Sшi), |
(3.12) |
где pпi и pшi – давление в поршневой и штоковой полостях гидроцилиндра i-й опоры; Sпi, Sшi – площади поршневой и штоковой полостей гидроцилиндра i-й опоры; Rmin – минимальное предельное значение силы реакции на любой из опор (порядка 10 % от расчетной доли веса платформы, приходящейся на один гидроцилиндр) [17].
41
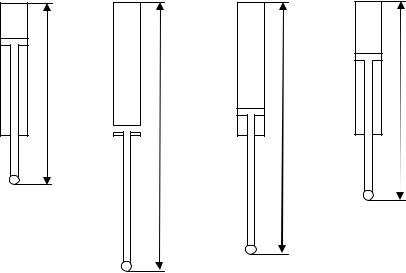
2. Длина i-й опоры Lmin пред ≤ Li ≤ Lmax пред.
|
|
|
Lmax пред |
|
Lmin пред |
|
|
|
|
||
|
|
|
|
||
|
|
|
|
||
|
|
|
|||
|
|
|
Lmax констр
Lmin конт
Рис. 3.3. Длины гидравлических опор
На рис. 3.3 схематично показаны положения штока гидроцилиндра опоры: Lmin конт – минимальная длина отдельной гидравлической опоры, при которой обеспечивается условие отсутствия касания грунта пневматическими ходовыми элементами машины; Lmax констр – максимальная длина отдельной гидравлической опоры, при которой шток выдвинут на максимально допустимую конструкцией гидроцилиндра длину; Lmin пред – минимальная предельно допустимая длина отдельной опоры в рабочем режиме машины; Lmax пред – максимальная предельно допустимая длина отдельной опоры в рабочем режиме машины [23, 24, 25].
3.2. Структурная схема процесса управления положением платформы строительной машины
На рис. 3.4 представлена блок-схема процесса управления положением платформы строительной машины [10, 11, 29]. Основным элементом системы является устройство управления (УУ). Для включения системы человек-оператор подает управляющий сигнал U1 на УУ.
УУ получает также сигналы U18…U19 с датчиков угла наклона (креномера), которые пропорциональны углам наклона платформы αx, αy по двум плоскостям.
42
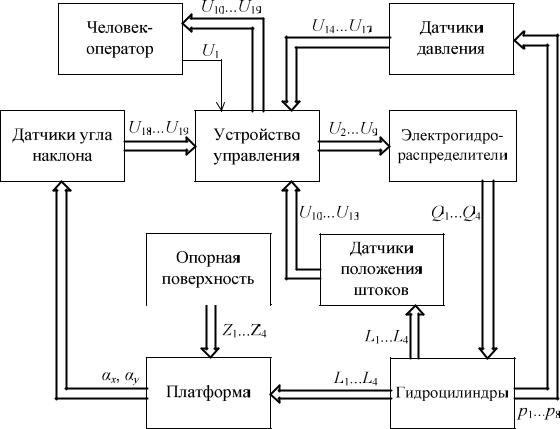
Рис. 3.4. Блок-схема процесса управления положением платформы строительной машины
Дополнительно на УУ поступают сигналы U10…U13 с датчиков длины выдвижных опор, эти сигналы пропорциональны положению штоков L1...L4 гидроцилиндров аутригеров. УУ формирует управляющие сигналы U2…U9 для электрогидрораспределителей, которые управляют положением штоков гидроцилиндров аутригеров. В зависимости от положения аутригеров изменяются углы наклона платформы в горизонтальной плоскости.
Всистеме также присутствуют датчики давления, они выдают сигналы U14…U17 для УУ, эти сигналы пропорциональны разности давлений в поршневой и штоковой полостях гидроцилиндров аутригеров. Данная информация позволяет судить о степени нагружения каждого из четырех аутригеров и при возникновении аварийной ситуации УУ остановит работу строительной машины.
Вкабине человека-оператора установлен дисплей-индикатор, на котором отображается информация о текущем состоянии платформы строительной машины. Опорная поверхность характеризуется высотой неровностей под выносными опорами. Предложенная блок-схема процесса управления положением платформы строительной машины
43
необходима для решения задач анализа и синтеза автоматизированных систем горизонтирования платформ строительных и дорожных машин [10, 11, 29].
3.3. Обоснование информационных параметров процесса управления положением платформы строительной машины
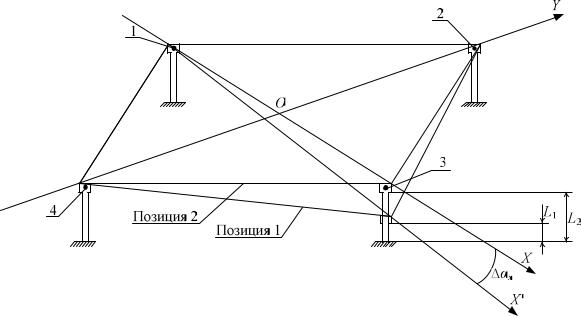
Основные параметры, необходимые для работы системы управления положением платформы, – это углы наклона по диагональным осям платформы к горизонту αx и αy. Эти углы задаются нормами безопасности при работе строительной машины [10, 11]. В процессе установки платформы изменяется длина гидравлических опор, что приводит к изменению углов наклона платформы. На рис. 3.5 схематично показана платформа строительной машины.
Цифрами 1, 2, 3, 4 показаны гидравлические опоры платформы (аутригеры); X, X′ и Y – диагональные оси, по которым измеряются углы наклона платформы относительно горизонта; L1 – начальная длина аутригера 3; L2 – конечная длина аутригера 3; αx – изменение угла наклона по диагональной оси X. При выдвижении штока гидроцилиндра аутригера 3 платформа меняет свое пространственное положение (Позиция 1 → Позиция 2), это приводит к изменению угла наклона по оси X.
Рис. 3.5. Изменение информационного параметра при изменении длины аутригера
44
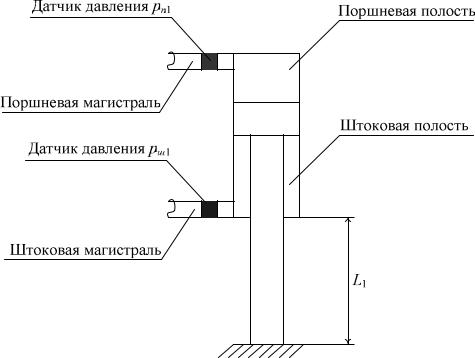
Рис. 3.6. Гидроцилиндр опоры 1
Таким образом, для обеспечения требуемого положения платформы необходимо контролировать два информационных параметра
– углы наклона относительно горизонта по осям X и Y, т.е. αx и αy. На рис. 3.6 схематично показан гидроцилиндр опоры 1 платформы строительной машины. L1 – длина выдвижения штока гидроцилиндра опоры; pп1 и pш1 – давления соответственно в поршневой и штоковой полостях гидроцилиндра опоры 1.
Для правильной работы системы необходимо контролировать также положения штоков гидроцилиндров опор 1, 2, 3, 4, т.е. L1, L2, L3, L4 соответственно (см. рис. 3.5). К информационным параметрам относятся давления в поршневой и штоковой полостях гидроцилиндров опор 1, 2, 3, 4: pп1, pш1; pп2, pш2; pп3, pш3; pп4, pш4 соответственно.
3.4. Ориентация датчиков для измерения угла наклона платформы
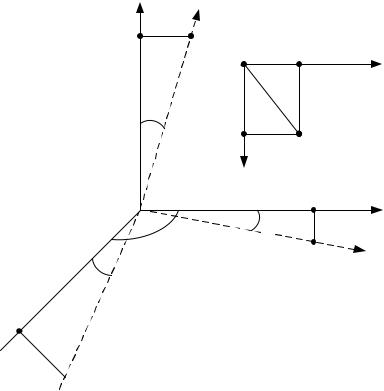
Проведем анализ действий оператора по выравниванию платформы строительной машины [34]. На рис. 3.7 показана схема поэтапного выравнивания платформы строительной машины при помощи рычагов управления (Р1, Р2, Р3, Р4 – номера рычагов, соответст-
45
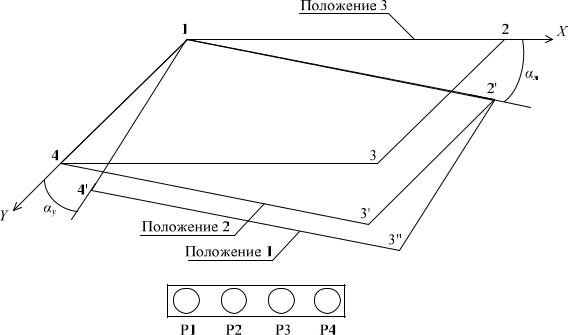
вующие номерам опор, которые обозначены цифрами 1, 2, 3, 4). Рассмотрен вариант, при котором платформа имеет наклон и по оси X, и по оси Y (положение 1).
Рис. 3.7. Схема поэтапного выравнивания платформы строительной машины при помощи рычагов управления
Так как оператор не имеет возможности управлять сразу тремя опорами, он вынужден устранять крен сначала по оси Y (т.е. переводить платформу в положение 2, путем подъема 3-й и 4-й опор, воздействуя на рычаги Р3 и Р4, а затем по оси X, поднимая 2-ю и 3-ю опоры при помощи рычагов Р2 и Р3, пока платформа не выровняется (положение 3) [34].
Рассмотрим также процесс выравнивания платформы строительной машины системой автоматического управления [12, 13, 14, 33]. На рис. 3.8 схематично показаны два положения платформы: это рабочее горизонтальное положение 2 и недопустимое положение 1, когда платформа имеет наклон. В положении 1 платформа имеет угол наклона по двум направлениям X и Y, наклон соответствует углам αx и αy. Для устранения наклона необходимо управление гидравлическими опорами 1, 2, 3, 4.
Оси X и Y расположены по диагоналям платформы. Датчики крена необходимо установить на платформе таким образом, чтобы оси вращения датчиков были параллельны диагоналями платформы. Такое расположение позволяет выравнивать платформу, управляя всеми
46
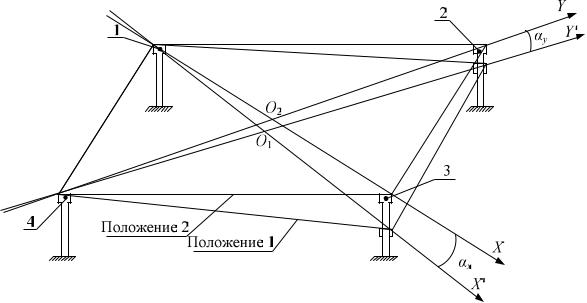
четырьмя опорами, что положительно сказывается на быстродействии системы [12, 13, 14, 33].
Рис. 3.8. Расположение осей измерения угла наклона платформы строительной машины
Для устранения угла наклона по оси X необходимо поднимать опору 3 и опускать опору 1, а для устранения угла наклона по оси Y – необходимо поднимать опору 2 и опускать опору 4. Достичь наибольшего быстродействия позволяет алгоритм управления сразу четырьмя опорами одновременно. При появлении наклона платформы микропроцессорный контроллер обрабатывает информацию с датчиков угла наклона и по заложенному алгоритму формирует сигналы управления каждой опорой.
Из всего вышеизложенного можно сделать вывод, что быстродействие системы будут определять конструктивные особенности гидросистемы управления опорами платформы строительной машины. Расположение осей измерения углов наклона платформы параллельно ее диагоналям существенно облегчает составление алгоритма работы системы. Но т.к. платформа строительной машины, а точнее, точки касания опор платформы образуют прямоугольник, а не квадрат, то оси X и Y перестают быть перпендикулярными, угол между ними становится менее 90°. Фактический угол зависит от конструкции опор и платформы [12, 13, 14, 33].
Для выполнения расчета примем одну из осей за неподвижную (рис. 3.9, ось X), а ось Y будем смещать относительно оси X. При смещении оси, т.е. при изменении угла между X и Y, по оси X показания
47
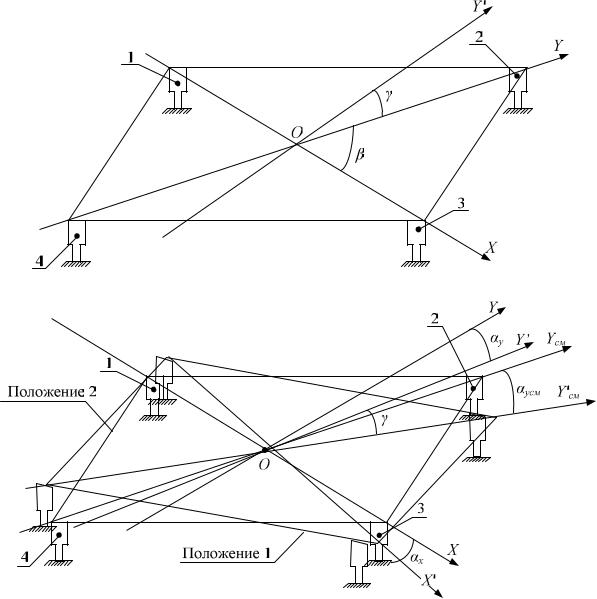
датчика угла наклона будут совпадать с реальным углом наклона по этой оси, а по оси Y показания будут различаться с реальным углом наклона платформы. Для исправления этих расхождений необходимо определить поправочный коэффициент, на который нужно умножить угол наклона, полученный с датчика наклона по оси X. Коэффициент будет зависеть от угла между осями X и Y.
Рис. 3.9. Смещение осей
Рис. 3.10. Угол наклона по датчику крена и фактический угол наклона платформы строительной машины
На рис. 3.9 схематично показано, как смещаются оси координат. β – фактический угол между диагональными осями X и Y; γ – угол смещения оси Y относительно оси Y'. На рис. 3.10 показано, как меняется реальный угол наклона по оси Y. αy – фактический угол наклона
48
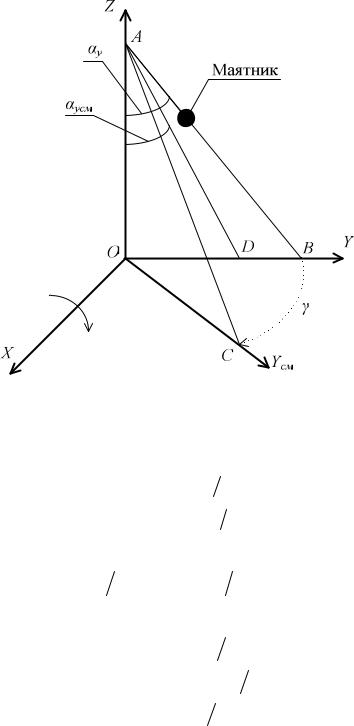
платформы по оси Y; αyсм – угол, который показывает датчик наклона. Необходимо вывести зависимость между αyсм и αy, для этого построим расчетную схему (рис. 3.11).
Рис. 3.11. Расчетная схема
Исходя из расчетной схемы (см. рис. 3.11) получаем следующие зависимости:
tg y OB OA; |
(3.13) |
tg yсм OD OA; |
(3.14) |
OD OB cos ; |
(3.15) |
OD tg yсм OB tg y ; |
(3.16) |
tg yсм tg y cos ; |
(3.17) |
tg y tg yсм cos ; |
(3.18) |
y arctg tg yсм cos ; |
(3.19) |
y yсм sin . |
(3.20) |
С использованием программы Microsoft Excel получены зависимости угла αy от αyсм и γ. На основании этих зависимостей построены графики, представленные на рис. 3.12, 3.13.
49