

2334
.pdf6.Выполнить оптимизацию параметров VВТЯГ и α по полученной регрессионной зависимости целевой функции tпп = f(VВТЯГ; α) → min, используя методы множителей Лагранжа и метод Ньютона.
|
Начало |
|
|
|
|
||
|
Задание постоянных |
|
|
|
Параметры платформы, |
||
|
|
|
|
||||
|
параметров |
|
|
|
гидропривода и |
||
математической модели |
|
|
|
устройства управления |
|||
устройства управления |
|
|
|
|
|||
|
|
|
|
|
|
|
Диапазон и шаг изменения скорости |
|
|
|
|
|
|
|
|
Задание оптимизируемых |
|
|
|
перемещения аутригеров |
|||
параметров устройства |
|
|
платформы VВТЯГ и ширины зоны |
||||
управления положением |
|
|
|
нечувствительности порогового |
|||
|
платформы |
|
|
|
элемента α |
||
|
|
|
|
|
|
|
|
|
Анализ |
|
|
|
|
Получение значений tпп и αz |
|
|
математической |
|
|
|
|
||
|
|
|
|
|
для параметров VВТЯГ и α. |
||
|
модели устройства |
|
|
|
|
||
|
управления на ЭВМ |
|
|
|
|
Запись массивов значений в |
|
|
|
|
|
|
файл |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Аппроксимация зависимости tпп и |
|
|
|
|
|
|
|
|
|
Аппроксимация |
|
|
||||
|
численной |
|
|
|
|
αz от VВТЯГ и α полиномом 3-й |
|
|
зависимости tпп и |
|
|
|
|
степени. Запись регрессионных |
|
|
αz от VВТЯГ и α |
|
|
|
|
зависимостей tпп = f(VВТЯГ; α) и |
|
|
|
|
|
|
|
|
αz = f(VВТЯГ; α) |
|
|
|
|
|
|
|
|
|
Оптимизация |
|
|
|
|
|
Использование метода |
|
параметров VВТЯГ и |
|
|
|
|
|
|
|
α по целевой |
|
|
|
|
|
множителей Лагранжа и |
|
функции |
|
|
|
|
|
метода Ньютона. Запись |
|
tпп = f(VВТЯГ; α) → |
|
|
|
|
|
найденных оптимальных |
|
min при αz ≤ αzзад |
|
|
|
|
|
значений параметров |
|
|
|
|
|
|
|
|
|
Вывод |
|
|
|
|
||
|
оптимальных |
|
|
|
|
||
|
значений |
|
|
|
tпп, αz, VВТЯГ и α |
||
|
параметров |
|
|
|
|
||
Конец
Рис. 5.1. Блок-схема алгоритма САПР основных параметров устройства управления положением платформы строительной машины
110
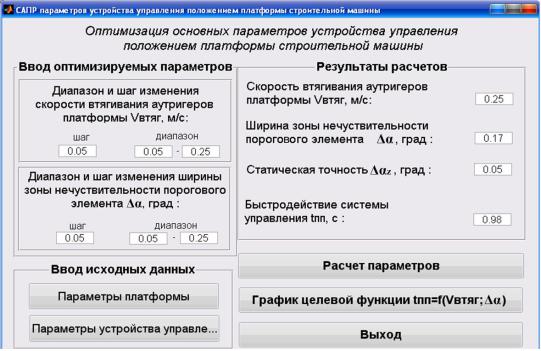
В качестве программной поддержки инженерной методики была разработана САПР основных параметров устройства управления положением платформы строительной машины в программном комплексе MATLAB, блок-схема алгоритма работы которой представлена на рис. 5.1, и графический пользовательский интерфейс САПР, который взаимодействует с рабочей областью MATLAB и его приложениями. Внешний вид интерфейса САПР представлен на рис. 5.2 и включает в себя окна для ввода численных параметров, кнопку выполнения расчета и построения графиков. Данная САПР связана с математической моделью процесса управления положением платформы строительной машины, составленной в Simulink, посредством m- файла, представляющего собой листинг программы расчета.
Программное обеспечение для автоматизации проектирования основных параметров устройства управления положением платформы строительной машины состоит из следующих компонентов:
файл математической модели процесса управления положением платформы строительной машины в Simulink;
m-файл, содержащий листинг программы расчета;
графический интерфейс САПР – основное окно программы, интерактивные окна ввода параметров подсистем математической модели процесса управления положением платформы строительной машины – «Параметры платформы», «Параметры устройства управления».
Рис. 5.2. Интерфейс САПР основных параметров устройства управления
111
Алгоритм работы САПР
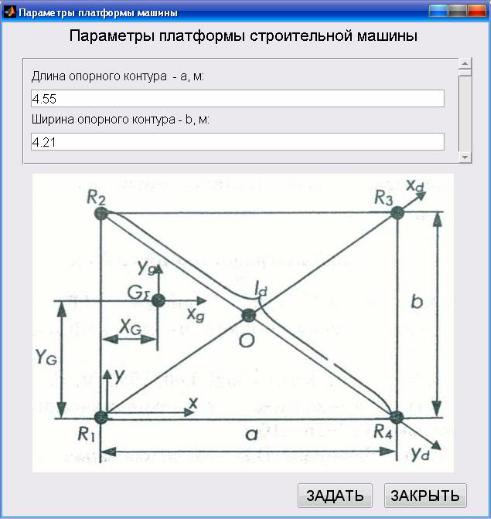
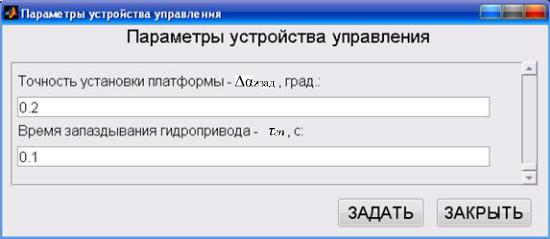
Ввод исходных данных: При нажатии кнопок выводятся окна ввода постоянных параметров математической модели процесса управления положением платформы строительной машины, которая разделена на две подсистемы: «Параметры платформы» и «Параметры устройства управления». Окна ввода параметров представлены на рис. 5.3, 5.4. После нажатия кнопки «ЗАДАТЬ» в рабочей области MATLAB автоматически формируются массивы значений параметров.
Рис. 5.3. Окно ввода параметров математической модели платформы
Ввод оптимизируемых параметров. Задаются диапазон и шаг изменения оптимизируемых параметров VВТЯГ и α. В рабочей области MATLAB автоматически формируются массивы значений параметров.
112
Расчет параметров:
а)после нажатия кнопки «Расчет параметров» запускается моделирование рабочего процесса управления положением платформы строительной машины. Производится циклический запуск и решение математической модели процесса управления, количество запусков зависит от заданных диапазонов и шага изменения оптимизируемых параметров VВТЯГ и α. В рабочей области MATLAB автоматически формируются массивы значений αz и tпп;
б)далее происходит аппроксимация численной зависимости αz и tпп от VВЫД и α методом наименьших квадратов. Происходит запись
регрессионной зависимости αz = f(VВТЯГ; α) и tпп = f(VВТЯГ; α) в виде специальной файл-функции;
в)нахождение интервалов допустимых значений VВТЯГ и α для заданной точности αzзад;
г)оптимизация и расчет параметров. Решается задача условной оптимизации целевой функции tпп = f(VВТЯГ; α) → min средствами встроенного пакета Optimization Tool.
Результаты расчетов. В данной области выводятся оптимальные значения параметров VВТЯГ, α и соответствующие им значения
αz, tпп.
Графики зависимости целевой функции. Выводится окно с гра-
фиком полученной зависимости tпп от VВТЯГ и α.
Рис. 5.4. Окно ввода постоянных параметров математической модели устройства управления
На рис. 5.3 представлен внешний вид окна ввода постоянных параметров платформы, в котором вводятся геометрические размеры
113
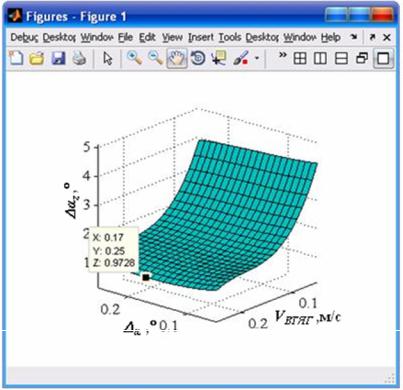
платформы. На рис. 5.4 представлено окно ввода постоянных параметров устройства управления (требуемое значение статической точности установки платформы) и гидропривода управления аутригерами платформы строительной машины (значения запаздывания гидропривода, геометрические размеры гидроцилиндра и др.). На рис. 5.5 представлен внешний вид окна с графиком полученной зависимости
tпп от VВТЯГ и α.
Расчеты, проведенные на ПЭВМ с достаточной для принятых допущений степенью точности, выполнялись за относительно короткий промежуток времени. Для работы САПР требуется компьютер с ATсовместимым процессором, с частотой не ниже 1000 МГц, укомплектованный оперативной памятью 512 Мб и более, с установленным программным комплексом MATLAB версии не ниже 7.0, включающий предустановленные пакеты: Simulink версии не ниже 6.5, Surface Fitting Toolbox и Optimization Toolbox любых версий.
Рис. 5.5. Окно с графиком полученной зависимости tпп от VВТЯГ и α
Разработанная САПР устройства управления положением платформы строительной машины позволяет производить на ПЭВМ оптимизацию параметров VВТЯГ и α согласно принятому критерию эф-
114
фективности на стадии их проектирования в зависимости от индивидуальных параметров конкретной строительной машины.
Интерфейс САПР позволяет организовать в наглядной форме ввод диапазонов оптимизируемых параметров устройства управления положением платформы строительной машины, задание постоянных параметров сложной динамической системы управления положением платформы строительной машины, а также вывод результатов расчета на дисплей в численной и графической форме.
ЗАКЛЮЧЕНИЕ
В настоящей монографии изложены основные результаты научных исследований, проводимых в СибАДИ, по осуществлению проектирования устройства управления положением платформы строительной машины.
Анализ требований, предъявляемых к устройствам управления положением платформы строительной машины, позволил обосновать критерий эффективности устройства управления положением платформы строительной машины, отражающий быстродействие устройства при обеспечении заданной точности, безотрывности опор от поверхности и сохранения управляемости гидроцилиндрами аутригеров.
Разработанная математическая модель сложной динамической системы процесса управления положением платформы строительной машины позволила решить задачи анализа и синтеза основных параметров устройства управления положением платформы строительной машины.
Разработанные алгоритмы автоматизации моделирования и оптимизационного синтеза, на основе которых разработана САПР устройства управления положением платформы строительной машины, позволяют рассчитывать оптимальные параметры устройства управления положением платформы строительной машины.
115
Библиографический список
1.Алексеева Т. В. Гидравлические машины, гидропривод мобильных машин: учеб. пособие / Т. В. Алексеева, Б. П. Воловиков, Н. С. Галдин, Э. Б. Шерман. – Омск: ОмПИ, 1987. – 88 с.
2.Алексеева Т. В. Отдельные разделы гидропривода мобильных машин: учеб. пособие / Т. В. Алексеева, Б. П. Воловиков, Н. С. Галдин. – Омск: ОмПИ, 1989. – 69 с.
3.Антонов А. В. Системный анализ / А. В. Антонов. – М.: Высшая школа, 2006. – 453 с.
4.Ануфриев И. Е. MATLAB 7 / И. Е. Ануфриев, А. Б. Смирнов, Е. Н. Смирнова. – СПб.: БХВ-Петербург, 2005. – 1104 с.
5.Балмасова Е. В. Моделирование объектов машиностроения в отечественных САПР: учеб. пособие / Е. В. Балмасова, Н. М. Лазариди, С. П. Шамец. – Омск: ОмГТУ, 2004. – 112 с.
6.Беляев В. В. Основы оптимизационного синтеза при проектировании зем- леройно-транспортных машин / В. В. Беляев. – 2-е изд., перераб. и доп. – Омск: ОТИИ, 2006. – 143 с.
7.Беляев В. В. Повышение точности планировочных работ автогрейдерами
сдополнительными опорными элементами рабочего органа: дис… канд. техн. наук / В.В. Беляев. – Омск: СибАДИ, 1987. – 230 с.
8.Быков В. П. Методическое обеспечение САПР в машиностроении : научное издание / В. П. Быков. – Л. : Машиностроение, 1989. – 255 с.
9.Гальперин М. И. Строительные машины: учебник для вузов / М. И. Гальперин, Н. Г. Домбровский. – 3-е изд., перераб. и доп. – М.: Высш. школа, 1980. – 344 с.
10.Григорьев М. Г. Блок-схема системы управления положением платформы сваезавинчивающей машины / М.Г. Григорьев // «Развитие дорожно-транс- портного комплекса и строительной инфраструктуры на основе рационального природопользования»: материалы IV Всероссийской научно-практической конференции студентов, аспирантов и молодых ученых, 20 – 21 мая 2009. – Омск: СибАДИ, 2009. – Кн. 1. – С. 311 – 314.
11.Григорьев М. Г. Обоснование информационных параметров для стабилизации поворотной платформы грузоподъемного автомобильного крана / М.Г. Григорьев // Сборник научныхтрудов. – Омск: НГАВТ, 2008. – Вып.6. – С. 120 – 125.
12.Григорьев М. Г. Разработка системы автоматического управления поворотной платформы автокрана / М.Г. Григорьев // Сборник научных трудов №6. Машины и процессыв строительстве. – Омск: СибАДИ, 2007. – №6. – С. 138 – 144.
13.Григорьев М. Г. Система автоматического регулирования крена платформы автокрана / М.Г. Григорьев // Межвузовский сборник трудов молодых ученых, аспирантов и студентов. – Омск: СибАДИ, 2007. – Вып.4. – Ч.1. – С. 70 – 74.
14.Григорьев М. Г. Система автоматического управления платформой автокрана / М. Г. Григорьев, Ю. Б. Тихонов // «ВТТВ 2007»: материалы IV Международного технологического конгресса, 4 – 9 июня 2007. – Омск: СибАДИ, 2007.
– Ч.1. – С. 300 – 304.
116
15.Жданов А. В. Математическая модель гидрораспределителя объемного гидропривода рулевого управления /А. В. Жданов, Ш. К. Мукушев // Строительные и дорожные машины. – 2007. – №10. – С. 34 – 36.
16.Завадский Ю. В. Методика статистической обработки экспериментальных данных / Ю. В. Завадский. – М.: МАДИ, 1978. – 156 с.
17.Корытов М. С. Использование нормальных реакций в опорных элементах автокрана для оценки его устойчивости / М. С. Корытов, С. А. Зырянова // Межвузовский сборник трудов студентов, аспирантов и молодых ученых. – Омск: СибАДИ, 2005. – Вып.2. – Ч.1. – С. 22 – 25.
18.Корячко В. П. Теоретические основы САПР: учеб. для вузов / В. П. Корячко, В. М. Курейчик, И. П. Норенков. – М.: Энергоатомиздат, 1987. – 400 с.
19.Ложкин С. А. Основы кибернетики / С. А. Ложкин. – М.: Изд-во МГУ, 2003. – 143 с.
20.Малиновский Е. Ю. Расчет и проектирование строительных и дорожных машин на ЭВМ / ред. Е.Ю. Малиновский. – М.: Машиностроение, 1980. – 216 с.
21.Налимов В. В. Теория эксперимента / В. В. Налимов. – М.: Наука, 1971.
–260 с.
22.Пантелеев А. В. Методы оптимизации в примерах и задачах: учеб. пособие / А. В. Пантелеев, Т. А. Летова. – М.: Высш. шк., 2005. – 544 с.
23.Щербаков В. С. Алгоритм работы системы автоматического горизонтирования опорной платформы строительной машины / В. С. Щербаков, М. С. Корытов, М. Г. Григорьев // Вестник ВГТУ. – Воронеж: ВГТУ, 2010. – Т.6. – №3. – С. 88 – 91.
24.Щербаков В. С. Информационный ресурс «Алгоритм автоматического выравнивания опорной платформы строительной машины в горизонтальной плоскости и контроля отрыва выносных опор от грунта»: свидетельство о регистрации электронного ресурса № 15275 / В. С. Щербаков, М. С. Корытов, М. Г. Григорьев. № 50201000260; заявл. 27.01.2010; опубл. 24.02.2010. Алгоритмы и программы. – № 1. – 1 с.
25.Щербаков В. С. Метод автоматического подъема, выравнивания опорной платформы строительной машины в горизонтальной плоскости и контроля отрыва выносных опор от грунта / В. С. Щербаков, М. С. Корытов, М. Г. Григорьев // Известия высших учебных заведений. Поволжский регион. Технические науки. – Пенза: ПГУ, 2010. – №1 (13). – С. 146 – 154.
26.Щербаков В. С. Научные основы повышения точности работ, выполняемых землеройно-транспортными машинами: дис… д-ра техн. наук /В.С. Щербаков. – Омск: СибАДИ, 2000. – 416 с.
27.Щербаков В. С. Основы моделирования систем автоматического регулирования и электротехнических систем в среде MATLAB и Simulink: учеб. пособие / В. С. Щербаков, А. А. Руппель, В. А. Глушец. – Омск: Изд-во СибАДИ, 2003. – 160 с.
28.Щербаков В. С. Синтез алгоритма автоматического подъема и горизонтирования опорной платформы строительной машины / В. С. Щербаков, М. С. Корытов, М. Г. Григорьев // Мехатроника, автоматизация, управление. – 2010. – №7. – С. 56 – 63.
117
29.Щербаков В. С. Система автоматического выравнивания опорной платформы строительной машины в горизонтальной плоскости / В. С. Щербаков, М. С. Корытов, М. Г. Григорьев // Вестник ВГТУ. – Воронеж: ВГТУ, 2010. – Т.6. – №2. – С. 88 – 92.
30.Юревич Е. И. Теория автоматического управления / Е. И. Юревич. – Л.: Энергия, 1975. – 416 с.
31.Пат. 2196893 РФ: МПК Е 21 В 44/00, Е 21 В 7/02. Способ автоматического горизонтирования несущей платформы с буровым агрегатом и устройство для его реализации / Сидоров И.А., Чухлебов В.Н. – № 2001111382/03; заявл. 24.04.01; опубл. 20.01.03, Бюл. № 2. – 2 с.
32.Пат. 2342310 РФ: МПК B 66 C 5/00, B 66 C 23/78. Устройство автоматического выравнивания опорной платформы / Великанов А.В., Иванищев П.И., Танчук П.В., Нилов В. А.; ГОУ ВПО «Воронежское высшее военное авиационное инженерное училище». – № 2007115362/11; заявл. 23.04.07; опубл. 27.12.08, Бюл. № 36. – 5 с.
33.Пат. 94220 РФ: МПК В 66 С 23/80, В 66 С 5/00: Устройство автоматического выравнивания опорной платформы в горизонтальной плоскости / Щербаков В.С., Корытов М.С., Григорьев М.Г.; ГОУ СибАДИ. – № 2009147434/22; заявл. 21.12.09; опубл. 20.05.10, Бюл. № 14. – 3 с.
34.ВСН 274-88. Правила техники безопасности при эксплуатации стреловых самоходных кранов. – М.: СтройИнфо, 2007. – 22 с.
35.ПБ 10-382-00, ПБ 10-257-98. Правила устройства и безопасной эксплуатации грузоподъемных кранов и кранов-манипуляторов. – Новосибирск: Сиб. унив. изд-во, 2007. – 335 с.
36.Строительно-дорожная, коммунальная и специальная техника в России
истранах СНГ / ЗАО «Уралтехноцентр». – Челябинск, 2002. – 301 с.
37.Cовременные САПР – URL://http:www.sapr.ru.
118

Научное издание
Виталий Сергеевич Щербаков, Михаил Сергеевич Корытов, Максим Геннадьевич Григорьев
АВТОМАТИЗАЦИЯ ПРОЕКТИРОВАНИЯ УСТРОЙСТВ УПРАВЛЕНИЯ
ПОЛОЖЕНИЕМ ПЛАТФОРМЫ СТРОИТЕЛЬНОЙ МАШИНЫ
Монография
***
Редактор И.Г. Кузнецова
***
Подписано к печати 28.02.11 Формат 60 90 1/16. Бумага писчая Оперативный способ печати Гарнитура Times New Roman Усл. п. л. 7,5, уч.-изд. л. 5,45 Тираж 500 экз. Заказ №____
Цена договорная
***
Издательство СибАДИ 644099, г. Омск, ул. П. Некрасова, 10
Отпечатано в подразделении ОП издательства СибАДИ