

2334
.pdfную совместимость с AutoCAD. Bricscad имеет интуитивно понятный интерфейс и не требует дополнительного обучения.
4.ProgeCAD. Система ProgeCAD 2009 Professional записывает и читает формат DWG от версии AutoCAD 2.5 до версии 2009. Программа предоставляет инструменты Express Tools, встроенную систему трехмерного моделирования физических объектов ACIS (ACIS solid modeling), позволяющую импортировать и редактировать растровые изображения, фотореалистичный рендеринг (визуализацию), печать форматов PDF, DWF, JPG, импортирование PDF в DWG, возможность обработки растровых изображений, импортирование растровых изображений в векторные, библиотеки блоков, объектное отслеживание (Otrack), полярное отслеживание (Polar Tracking).
5.GstarCAD. Базовые функции этой системы: поддержка формата DWG версий AutoCAD от 2.5 до 2009; используются шрифты TTF
иSHX; поддержка DWGCODEPAGE; поддержка шаблонов DWT; восстановление чертежа; резервное копирование; аудит и восстановление чертежа; экспорт DWG в PDF; экспорт в DWF 2D и 3D; редактирование внешних ссылок на месте; менеджер профилей пользователя.
6.InfrasoftCAD. InfrasoftCAD – российская САПР-программа, отличная замена AutoCAD. Система полностью соответствует промышленному стандарту в области САПР. Внутренний формат файлов системы – DWG и DXF – обеспечивает полную совместимость в чтении, редактировании и записи файлов, созданных в AutoCAD версий 2.5- 2010.
7.BtoCAD. BtoCAD – это полноценная система проектирования,
иона может быть широко применена почти во всех отраслях промышленности. Ввиду своей компактности, легкости установки и низких системных требований возможна установка BtoCAD даже на лэптоп. Пользоваться системой легко и комфортно.
8.КОМПАС-3D, разработанная российской компанией АСКОН. Система КОМПАС-3D позволяет реализовать классический процесс трехмерного параметрического проектирования – от идеи к ассоциативной объемной модели, от модели к конструкторской документации. Основные компоненты КОМПАС-3D – собственно система трехмерного твердотельного моделирования, универсальная система автоматизированного проектирования КОМПАС-График и модуль проектирования спецификаций. Все они легки в освоении, имеют русскоязычные интерфейс и справочную систему.
30
9. AutoCAD Inventor, разработанная компанией Autodesk. AutoCAD Inventor Suite – комплекс программного обеспечения для трехмерного проектирования и составления конструкторской документации в области машиностроения. Inventor – это семейство продуктов для промышленного 3D проектирования, включающее в себя средства моделирования, создания инструментальной оснастки и обмена проектными данными. Использование технологии цифровых прототипов (3D-моделей) позволяет создавать изделия более высокого качества за меньшее время.
Проведенный анализ современного рынка программных продуктов для САПР позволил сделать вывод, что на данный момент САПР параметров устройства управления положением платформы строительной машины не разработана.
1.6. Обзор принципов и методов автоматизированного проектирования
Применение ЭВМ при проектно-конструкторских работах в своем развитии прошло несколько стадий и претерпело значительные изменения. С появлением вычислительной техники был сделан акцент на автоматизацию проектных задач, имеющих четко выраженный расчетный характер, когда реализовывались методики, ориентированные на ручное проектирование. Затем по мере накопления опыта стали создаваться программы автоматизированных расчетов на основе методов вычислительной математики (параметрическая оптимизация, метод конечных элементов и т. п.). В последние годы большое внимание уделяется автоматизации расчетно-конструкторских работ при проектировании типовых узлов и агрегатов, когда синтез конструкции проводится эвристически, а основные параметры выбираются и оптимизируются в интерактивном режиме диалога проектировщика и ЭВМ [5, 6, 8, 18].
Решение проблем автоматизации проектирования с помощью ЭВМ основывается на системном подходе, т. е. на создании и внедрении САПР – систем автоматизации проектирования технических объектов, которые решают весь комплекс задач от анализа задания до разработки полного объема конструкторской и технологической документации. Это достигается за счет объединения современных технических средств и математического обеспечения, параметры и ха-
31
рактеристики которых выбираются с максимальным учетом особенностей задач проектно-конструкторского процесса [5, 6, 8, 18].
Существенным отличием автоматизированного проектирования от неавтоматизированного является возможность замены дорогостоящего и занимающего много времени физического моделирования математическим моделированием. При этом необходимо иметь в виду одно существенное обстоятельство: при проектировании число вариантов необозримо. Поэтому невозможно ставить задачу создания универсальной САПР, необходимо решать вопросы проектирования для конкретного семейства машин [6].
Для создания САПР необходимо [5, 6, 8, 18]:
–совершенствовать проектирование на основе применения математических методов и средств вычислительной техники;
–автоматизировать процессы поиска, обработки и выдачи информации;
–использовать методы оптимального и вариантного проектирования, применять эффективные, отражающие существенные особенности, математические модели проектируемых объектов, комплектующих изделий и материалов;
–создавать банки данных, содержащих систематизированные сведения справочного характера, необходимые для автоматизации проектирования объектов;
–унифицировать и стандартизовать методы проектирования;
–реализовывать взаимодействие с автоматизированными системами различного уровня и назначения.
Математическая модель процесса проектирования. Проекти-
рование является сложным динамическим процессом. Изучение этого процесса возможно как на физических, так и на математических моделях. Поскольку построение физических моделей процесса проектирования связано с большими издержками средств и времени, то наиболее целесообразно исследовать этот процесс на математических моделях [5, 6, 8, 18].
Как уже отмечалось, основной чертой сложных систем принято считать иерархичность структуры. Примером подобного рода может служить задача проектирования сложной системы, такой как система автоматического горизонтирования платформы строительной машины. Такая система состоит из ряда подсистем различного уровня.
На рис. 1.8 приводится одна из возможных классификаций математических моделей процесса проектирования системы управления положением платформы строительной машины [6].
32
|
|
|
Математическаямодельпроцесса |
|
Теоретико- |
||
Стохастическая |
|
||||||
|
|
проектирования |
|
|
игровая |
||
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
Информационная |
|
Сетевая |
|
|
Детерминированная Эвристическая
Рис. 1.8. Классификация моделей проектирования
Детерминированная модель строится в случаях, когда факторы влияния на конечный результат процесса поддаются достаточно точной оценке, a случайные факторы либо отсутствуют, либо ими можно пренебречь. Если факторы, влияющие на конечный результат процесса, являются случайными, то строится вероятностная (стохастическая) модель. Поскольку проектирование сложных систем можно представить как процесс переработки информации, то для описания процесса проектирования может быть использована информационная модель.
Проектирование сложных систем, выполняемое коллективами специалистов, основывается в значительной степени на опыте, интуиции, аналогии и индукции, т.е. на эвристических методах. Эвристические процедуры (операции) не получили до сего времени формализованного отображения и ограничиваются описательной формой представления. Тем не менее процесс проектирования с известной степенью приближения может быть представлен эвристической моделью [6]. Процесс проектирования сложных систем протекает в условиях неполной информации. С этих позиций процесс проектирования может быть представлен теоретико-игровой моделью [6].
Методы сетевого планирования дают возможность объективно устанавливать минимально необходимое время, а также необходимый расход материальных ресурсов для выполнения проектных работ. Кроме того, эти методы позволяют учитывать «узкие места», возникающие в процессе проектирования, и вносить поправки в организацию проектных работ. Это позволяет процесс проектирования сложных систем представлять сетевой моделью, базирующейся на теории направленных графов [6].
При составлении математической модели следует руководствоваться следующими соображениями [5, 6, 8, 18]:
– модель должна четко отвечать поставленной задаче. Модель не должна быть шире, чем это безусловно необходимо для решения поставленной задачи;
33
–модель должна быть предельно простой и удобной для анализа
ив то же время предельно чувствительной к основным исследуемым процессам.
При этом необходимо абстрагироваться от всех посторонних процессов, чтобы проанализировать влияние на конечный результат основных процессов. Усложнение модели подробностями чревато тем, что влияние главных параметров «тонет» в совокупном влиянии многих других факторов [6].
Математические методы оптимизации. Одна из основных це-
лей проектирования заключается в оптимизации решений, т.е. в достижении заданных характеристик при наименьших затратах или наилучших характеристик проектируемых систем при ограниченных затратах имеющихся ресурсов.
Сущность оптимизации сводится к отысканию при наложенных ограничениях таких значений переменных х1, х2, х3,… , хn, которые дают минимум (максимум) целевой функции [6]:
Z Z x1,x2 ,x3...xn . |
(1.2) |
Общая задача оптимизации может быть сформулирована в следующем виде. Необходимо найти значения переменных х1, х2, х3,…, хn, при которых целевая функция Z принимает экстремальное значение с учетом функциональных ограничений (равенств) и граничных условий (неравенств) [6].
Функциональные ограничения могут быть связаны как с ограниченностью ресурсов, так и с требованиями, наложенными на переменные и их зависимости между собой (например, такими требованиями при проектировании систем управления являются: характеристики надежности и устойчивости, качество управления, быстродействие и др.).
Математические методы оптимизации можно классифицировать так, как это показано на рис. 1.9 [5, 6, 8, 18]. Применение аналитических методов всегда предпочтительней численных, поскольку аналитические методы позволяют получить достаточно полную и общую картину исследуемой функции, установить влияние различных факторов на эту функцию. Аналитические методы применимы, когда критерий, ограничения и связи между координатами, решениями и аргументом, а также начальные и конечные условия представлены функциями, которые должны быть, по крайней мере, два раза дифференцируемыми и иметь конечное число точек разрывов. На рис. 1.10
34
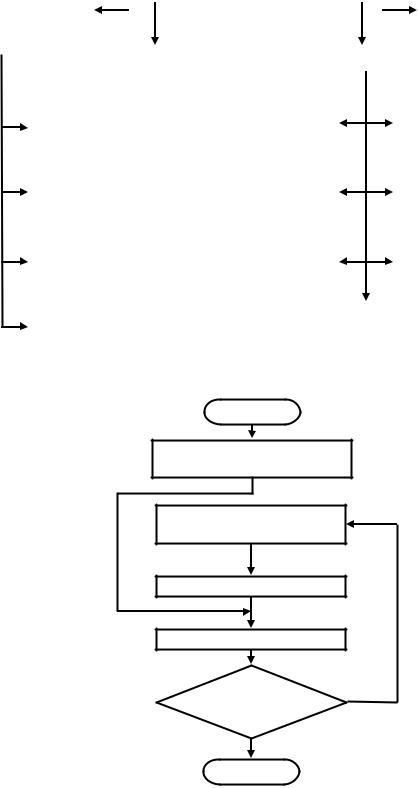
представлена блок-схема алгоритма поиска оптимальных решений для любого метода [6].
Эвристическое |
|
|
|
|
|
|
|
|
|
|
Стохастическое |
|||||||
|
|
|
Методыоптимизации |
|
|
|||||||||||||
программирование |
|
|
|
|
|
|
|
программирование |
||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Аналитическиеметоды |
|
|
|
Численныеметоды |
|
|
||||||||||
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Дифференциальное |
|
|
Линейное |
|
|
|
Нелинейное |
|
||||||||
|
|
исчисление |
|
|
программирование |
|
|
программирование |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Вариационное |
|
|
|
Динамическое |
|
|
Геометрическое |
|
||||||||
|
|
исчисление |
|
|
|
программирование |
|
|
программирование |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Множители |
|
|
|
|
Регулярный |
|
|
|
Случайный |
|
||||||
|
|
Лагранжа |
|
|
|
поиск |
|
|
|
поиск |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Принцип |
|
|
|
|
|
|
|
Дискретныйпринцип |
|
|
||||||
|
|
Понтрягина |
|
|
|
|
|
максимума |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 1.9. Классификация методов оптимизации
Начало
Выбор начальной точки оптимизации X0
Определение направления поиска
Шаг поиска
Вычисление Z(X)
ОптимумZ(X) Нет найден?
Да
Останов
Рис. 1.10. Блок-схема алгоритма поиска оптимальных решений
35
Таким образом, проведенный обзор и анализ методов автоматизации проектирования позволил представить методы, средства и подходы к созданию САПР основных параметров устройства управления положением платформы строительной машины.
2. ОБЩАЯ МЕТОДИКА ИССЛЕДОВАНИЙ СИСТЕМЫ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ПЛАТФОРМЫ СТРОИТЕЛЬНОЙ МАШИНЫ
2.1. Методика теоретических исследований системы управления положением платформы строительной машины
Системный подход является общепринятым направлением методологии, определяющим ориентацию научных исследований, и занимает ведущее место в научном познании. В связи с этим в данной работе системный подход использовался в качестве общей методики теоретических исследований системы управления положением платформы строительной машины [3].
Суть системного подхода состоит в том, что система управления положением платформы строительной машины рассматривается как ограниченное множество элементов, объединенных в единое целое связями. Группы элементов, объединенных одним функционально завершенным агрегатом, будут являться подсистемами. Целостность системы управления положением платформы строительной машины заключается в том, что ее свойства не могут быть поняты и оценены без знания свойств ее подсистем. Иерархичность и структурность системы характеризуется тем, что каждая ее подсистема может рассматриваться, в свою очередь, как система с возможностью ее описания с помощью сети связей. Множество моделей, которыми может быть описана система по различным аспектам, является одним из основных принципов системного подхода. Принцип взаимозависимости определяет рассмотрение свойств системы во взаимосвязи с окружающей средой [3].
Решение задач работы с применением системного анализа представлено следующими этапами [3]:
1) постановка задачи: определение объекта и предмета исследования; определение критерия эффективности для процесса управления положением платформы строительной машины;
36
2)решение поставленных задач: определение структуры процесса управления положением платформы строительной машины; разбиение системы управления положением платформы строительной машины на подсистемы; составление математических моделей подсистем и общей модели системы управления положением платформы строительной машины;
3)анализ системы: обоснование параметров устройства управления положением платформы строительной машины, влияющих на критерий эффективности, и их границ; анализ полученной математической модели сложной динамической системы управления положением платформы строительной машины; получение численных зависимостей эффективности основных параметров устройства управления положением платформы строительной машины;
4)синтез системы: выявление функциональных зависимостей критерия эффективности от основных параметров устройства управления положением платформы строительной машины; оптимизация основных параметров устройства управления положением платформы строительной машины согласно целевой функции выбранного критерия эффективности; составление инженерной методики расчета оптимальных значений параметров и САПР основных параметров устройства управления положением платформы строительной машины.
Математическое моделирование составляет основу теоретических исследований работы, при этом исследуемый объект заменяется его математической моделью, которая отражает с достаточной степенью точности исследуемые свойства объекта.
Составление математической модели проведено путем широко распространенного описания подсистем – при помощи передаточных
истатистических функций, а также дифференциальных уравнений, описывающих исследуемые свойства объекта [3].
Математическое моделирование сложной динамической системы управления положением платформы строительной машины проведено на ПЭВМ с процессором Intel Core Duo 1,50 ГГц с объемом ОЗУ 1 ГБ в программном комплексе MATLAB R2009a [4, 27]. Такой способ имеет ряд преимуществ перед натурными испытаниями: дешевизна исследований; вмешательство извне на любой стадии исследований; возможность моделирования условий эксперимента, которые невозможно воспроизвести в реальных условиях.
При составлении математической модели системы управления положением платформы строительной машины в данной работе рассматривалась сложная динамическая система, на которую действуют
37
как управляющие, так и возмущающие воздействия, имеющие стохастическую природу. Параметры гидропривода также изменяются во времени, но эти изменения несоизмеримо малы по сравнению с изменениями внешних воздействий, поэтому при моделировании подсистемы гидропривода он представлен системой с фиксированными параметрами [3, 21].
2.2. Методика экспериментальных исследований
Комплексный метод исследований предполагает проведение экспериментальных исследований, основными задачами которых являются: подтверждение адекватности математической модели объекта исследования; определение численных значений параметров, входящих в математические модели объекта; подтверждение работоспособности и эффективности технического решения, внедренного в производство [21].
В настоящее время представленные в данной работе механические подсистемы, например, гидропривод, достаточно хорошо изучены и математически описаны. Предшествующими исследователями проведено множество экспериментальных исследований, в результате которых накоплена огромная масса эмпирических данных, что позволяет принять имеющийся математический аппарат.
Предлагаемая математическая модель системы управления положением платформы строительной машины имеет новизну и требует подтверждения своей адекватности. Процесс подтверждения адекватности можно представить следующей последовательностью действий:
1.Проведение натурного эксперимента с целью получения массива экспериментальных данных.
2.Проведение машинного эксперимента при необходимых параметрах и условиях с целью получения теоретических данных.
3.Оценка адекватности математической модели путем сравнения экспериментальных и теоретических данных.
При проведении экспериментальных исследований возможно использование двух методов: активного и пассивного [21].
Пассивный эксперимент предусматривает наблюдение за выходными координатами без вмешательства в процесс функционирования системы. Результаты пассивного эксперимента используются для подтверждения адекватности математических моделей, проверки работоспособности конструкторских разработок, определения эффек-
38
тивности предложенных инженерных решений [21]. Активный эксперимент предусматривает формирование детерминированных воздействий на подсистемы и сложную динамическую систему в целом. Выходные координаты и переходные процессы дают информацию о свойствах объекта [21]. В данной работе целесообразно использовать методологию пассивного эксперимента, в силу того что внешние возмущающие воздействия имеют постоянную природу, а при подтверждении адекватности модели целесообразно формировать постоянное воздействие.
Таким образом, проведенный натурный эксперимент будет служить доказательством части представленной математической модели процесса управления положением платформы строительной машины.
3. РАЗРАБОТКА МАТЕМАТИЧЕСКОЙ МОДЕЛИ УСТРОЙСТВА УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ПЛАТФОРМЫ СТРОИТЕЛЬНОЙ МАШИНЫ
Проведение теоретических исследований вновь создаваемой техники невозможно без математического моделирования исследуемого объекта. В настоящее время широко распространено представление математических моделей в виде системы каких-либо уравнений (общих дифференциальных, частных дифференциальных, алгебраических и др.), которые с достаточной степенью точности отражают исследуемые свойства объекта [20].
3.1. Обоснование критерия эффективности процесса управления положением платформы строительной машины
Для правильной и безопасной работы строительной машины необходимо выдерживать платформу в горизонтальном положении. Допустимые отклонения угла наклона платформы к горизонту определены в требованиях безопасностипри работе строительной машины[34,35].
x |
xдоп; |
(3.1) |
y |
yдоп, |
(3.2) |
где αx и αy – фактические углы наклона платформы к горизонту по осям X и Y; αxдоп и αyдоп – максимально допустимые углы наклона платформы к горизонту по осям X и Y.
39