

2261
.pdfУ математического маятника вся масса сосредоточена в одной точке – центре тяжести. Поэтому момент инерции математического маятника легко вычислить:
Iм m l2. |
(29) |
Подставляя выражение (29) в уравнения (26), (27), (28), получим для математического маятника:
|
|
|
|
|
|
|
mgl |
|
|
|
g |
(30) |
|||||||||||||
0 |
|
|
|
|
|
|
|
|
|
|
; |
|
|
|
|||||||||||
|
|
|
ml2 |
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
l |
|
||||||||||||
|
|
|
0 |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
f |
0 |
|
|
|
|
|
|
|
g |
; |
|
|
(31) |
||||||||||||
2 |
|
2 |
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
l |
|
||||||||||||||
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
Т |
0 |
|
|
2 |
|
|
|
|
|
|
|
l |
. |
(32) |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
f0 |
|
|
|
|
|
|
|
|
|
g |
|
||||||||
1.8. Уравнение свободных колебаний линейной диссипативной системы
Диссипативная система – это неконсервативная система, у которой полная механическая энергия при любом движении убывает.
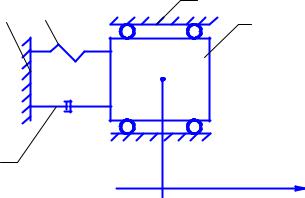
На рис. 7 изображена расчётная схема линейной диссипативной системы с одной степенью свободы. Система не подвергается внешним воздействиям. Поэтому её колебания называют свободными.
Перемещения тела вдоль оси Х отсчитываем от его устойчивого равновесного положения. При движении тела на него действует сила
упругости С с х, и сила вязкого трения В в х .
- 20 -
4 |
2 |
5 |
1 |
||
|
|
с |
|
|
ц.т. т |
|
3 |
d |
|
x |
|
|
|
|
|
|
0 |
Рис. 7. Схема колебательной диссипативной системы: 1 – тело постоянной массы; 2 – линейный упругий элемент (с постоянной упругостью С);
3 – элемент вязкого трения (демпфер)
спостоянным коэффициентом вязкого трения b; 4 – неподвижная стойка; 5 – направляющие.
По второму закону Ньютона:
m x B С,
m x b x c x, m x b x cx 0.
Разделив почленно уравнение (33) на m, получим:
|
|
x |
b |
x |
c |
x 0. |
||||
|
|
|
||||||||
|
|
|
|
|
m |
|
|
m |
||
Обозначив |
b |
2h, |
с |
0 |
2 , |
получим: |
||||
|
|
|||||||||
|
m |
m |
|
|
|
|
||||
x 2h x 02 x 0.
(33)
(34)
(35)
Поскольку система не подвергается внешним воздействиям, правая часть уравнений (33) и (35) равна нулю.
- 21 -

В уравнении (35) коэффициент h b называется коэффици-
2m
ентом затухания или коэффициентом демпфирования. Коэффициент
0 собственная угловая частота колебаний рад/ с,
Определим размерность коэффициента затухания h и сравним её
сразмерностью 0.
Вуравнении (33) каждое слагаемое имеет размерность силы (Н),
м
а в уравнении (35) – размерность ускорения .
с2
Отсюда следует, что
h b ;
2 m
b x H кг м;
с2
b |
кг м |
|
с |
|
кг |
. |
с2 |
|
|
||||
|
|
м с |
||||
Зная размерность коэффициента вязкого трения b, находим размерность коэффициента затухания h:
кг
h |
с |
|
1 |
. |
кг |
|
|||
|
|
с |
||
Сравнивая размерности собственной угловой частоты колебаний 0 и коэффициента затухания h, мы можем сказать, что эти раз-
ные физические величины имеют одинаковую размерность 1. По-
с
этому мы можем сравнивать эти две величины, вычитать и складывать.
Общий интеграл уравнения (35) имеет различный вид в зависимости от соотношений h и 0.
- 22 -

При докритическом демпфировании, когда h< 0, |
(b |
m c ) |
общее решение дифференциального уравнения (35) имеет вид: |
|
|
|
|
|
x е h t (c1 sin t c2 |
cos t), |
(36) |
|||||||||
где h |
b |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
2m |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
2 h2 , |
|
|
|
|
|
|||
где угловая |
частота затухающих колебаний, собственная |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
угловая частота системы, h – коэффициент затухания. |
|
|||||||||||||
Постоянные С1 и С2 |
определяются из начальных условий: |
|
||||||||||||
при t 0 |
x x |
x x |
, |
|
|
|
|
|
|
|
|
|
||
|
0 |
0 |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
С |
x0 |
h x0 |
,С |
2 |
x |
0 |
. |
|
|||
|
|
|
|
|
|
|||||||||
|
|
|
|
1 |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Другая форма решения дифференциального уравнения (35) имеет вид:
x А е h t sin( t 0 ), |
(37) |
|
где А – начальная амплитуда колебания;
|
|
|
|
(x |
hx )2 |
|
|
2 |
|
(x |
hx )2 |
|
|
2 |
|
|
А С2 |
С2 |
|
x |
|
|
x |
|
. |
||||||||
0 |
|
0 |
0 |
|
0 |
0 |
0 |
|
||||||||
|
|
|
|
|
|
|
||||||||||
1 |
2 |
|
|
|
2 |
|
|
|
0 |
2 h2 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
0 начальная фаза колебания.
|
|
x |
0 |
|
|
|
2 |
h2 |
|
|
|
x |
0 |
|
|
2 |
h2 |
||||
tg 0 |
|
|
|
|
|
|
0 |
|
|
, |
0 |
arctg |
|
|
|
0 |
|
|
|
||
|
x |
0 |
|
h x |
0 |
|
x |
h x |
. |
||||||||||||
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
0 |
|
||
Обе формы решения дифференциального уравнения описывают затухающие колебания с постепенно убывающей амплитудой (рис. 8).
- 23 -

Ao |
A=Ao*е-ht |
Xo |
|
|
t |
0 |
|
-Ao |
A=-Ao*е-ht |
|
Рис. 8. Затухающие колебания |
Огибающие кривой процесса затухания определяются функция-
ми:
А А0 е ht ,
где A0 начальная ордината огибающей.
Угловая частота свободных затухающих колебаний определяется выражением:
|
|
|
|
|
4mс b2 |
. |
|
||||||
|
|
2 h2 |
|
(38) |
|||||||||
|
|
|
|||||||||||
|
0 |
|
|
|
2m |
|
|||||||
|
|
|
|
|
|
|
|
|
|||||
Соответственно длительность одного цикла составляет: |
|
||||||||||||
Т |
|
2 |
|
|
|
4 m |
|
. |
(39) |
||||
|
|
|
|
|
|||||||||
|
|
|
|
||||||||||
|
|
|
4mc b2 |
|
|||||||||
Чаще всего влияние трения на частоту затухающих колебаний пренебрежимо мало, в формуле (38) можно принять h 0.
Таким образом, для практических расчётов можно принять, что угловая частота затухающих колебаний приблизительно равна угловой частоте свободных колебаний системы без трения. Т.е. можно
принять 0 и Т Т0.
- 24 -

При затухающих колебаниях отношение двух последовательных |
||||||||
максимальных отклонений А(t ) |
и A(t T ) является постоянной ве- |
|||||||
личиной, равной еhT . |
|
|
|
|
|
|
|
|
|
|
|
A(t ) |
ehT . |
|
|
|
(40) |
|
|
A(t T ) |
|
|
|
|
||
Натуральный логарифм этого выражения называется логариф- |
||||||||
мическим декрементом затухания: |
|
|
|
|
|
|||
|
|
lnehТ hT ; |
|
|
|
(41) |
||
|
|
|
|
|
|
|
|
|
|
h Т |
b |
|
4 m |
|
2 b |
. |
(42) |
|
|
2m 4mc b2 |
|
4mc b2 |
|
|||
Малые величины, возведённые в квадрат, становятся ещё мень- |
||||||||
ше, поэтому для приближённых расчётов величиной b2 |
в знаменателе |
|||||||
выражения (42) можно пренебречь. Получим: |
|
|
|
|
||||
|
|
|
b . |
|
|
|
(43) |
|
|
|
|
mc |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ao |
T |
|
|
T |
|
|
|
|
A(t) |
|
|
|
|
|
|
|
|
Xo |
|
|
A(T+t) |
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
0 |
|
|
|
|
|
|
|
|
-Ao |
|
|
|
|
|
|
|
|
|
Рис. 9. График затухающих колебаний |
|
|
|||||
- 25 -

На рис. 9 изображён график затухающих колебаний, на котором обозначены амплитуды затухающих колебаний и длительности одного цикла колебаний при докритическом демпфировании.
При закритическом демпфировании коэффициент вязкого трения увеличивается, становятся справедливыми неравенства
h 0; |
(44) |
||
b 2 |
|
|
|
mc. |
(45) |
||
В этом случае общее решение дифференциального уравнения движения системы
mx bx cx 0
запишется в виде:
x c1еs1 t |
c2 |
es2t , |
(46) |
где |
s |
|
b |
b2 4mс |
. |
|
|
||||
|
1,2 |
|
|
2m |
|
|
|
|
|
|
Постоянные интегрирования определяются через начальные условия выражениями:
С1 s2 x0 x0 ;
s1 s2
C2 s1 x0 x0 . s2 s1
Движение, описываемое выражением (46) является апериодиче-
ским (неколебательным). При любых начальных условиях x0 и x0 переменная X асимптотически стремится к нулю.
- 26 -

X |
. |
|
Xo |
Xo>0 . |
|
Xo=0 |
||
|
||
0 |
t |
|
. |
||
|
||
|
Xo<0 |
Рис. 10. Графики апериодических колебаний системы
при различных начальных условиях
Рассмотрим третий случай, когда h 0 |
(b 2 mc). |
Решение дифференциального уравнения (33) в этом случае имеет вид:
x е h (t) (c c |
2 |
t), |
(47) |
1 |
|
где с1 х0 |
,с2 x0 h x0 |
. |
Это решение по характеру не отличается от решений, проиллюстрированных на рис. 10.
Таким образом, это движение также носит апериодический (неколебательный) характер.
Вывод: свободное движение диссипативной системы является колебательным при h 0 (коэффициент затухания меньше собственной угловой частоты), и апериодическим (неколебательным) при h 0 .
1.9.Вынужденные колебания системы
содной степенью свободы при отсутствии трения
Уравнение свободных колебаний с учётом трения имеет вид:
mx bx cx 0.
Уравнение свободных колебаний без учёта трения (при b 0):
- 27 -
mx cx 0.
Уравнение вынужденных колебаний отличается от уравнения свободных колебаний тем, что появляется правая часть дифференциального уравнения, которая описывает внешние возмущающие воздействия, действующие на систему (вынуждающую силу). Если вынуждающая сила описывается функцией F H sin t, то уравнение вынужденных колебаний системы с одной степенью свободы при отсутствии трения принимает вид:
mx cx H sin t. |
(48) |
Разделим обе части уравнения (48) на массу (коэффициент при x ).
x |
c |
x |
H |
sin t. |
(49) |
m |
|
||||
|
|
m |
|
||
Обозначив |
c |
0 |
2 , получим: |
|
|||
|
m |
|
|
x |
2 |
|
H |
sin t. |
(50) |
0 |
|
||||
|
|
m |
|
||
В уравнении (50) 0 собственная угловая частота, угловая частота вынуждающей силы, H – амплитуда вынуждающей силы. Решение этого дифференциального уравнения при 0 и нулевых
начальных условиях (x0 0, x0 0) имеет вид:
x |
|
H |
(sin t |
|
sin t ). |
(51) |
|
|
|
|
|
||||
|
m( 0 |
2 2 ) |
|
0 |
|
||
|
|
0 |
|
||||
Полученное решение представляет разность двух гармонических колебаний с различными частотами ( и 0 ). В действительности этот процесс можно наблюдать лишь в самом начале, т.к. колебания с собственной частотой 0 постепенно затухают.
- 28 -

Таким образом, наиболее существенная стационарная часть процесса (установившиеся вынужденные колебания) описываются выражением:
x |
|
H |
|
sin t. |
(52) |
|
m( 0 |
2 2 |
) |
||||
|
|
|
Амплитуда этих колебаний, происходящих с частотой , определяется уравнением:
|
|
|
|
|
|
|
|
|
|
|
|
H |
|
|
|
|
|
|
|
||||||
|
А |
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
(53) |
||||||
m |
|
0 |
2 |
2 |
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
В выражении (53) введём обозначение 0 |
2 |
|
с |
. |
|||||||||||||||||||||
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m |
|
А |
|
|
|
H |
|
|
|
|
|
H |
|
|
|
. |
(54) |
||||||||||
m |
|
|
с |
2 |
|
|
|
|
c m 2 |
|
|
||||||||||||||
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
m |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
В выражении (54) H – это амплитуда возмущающей силы, а ве-
личина с m 2 называется эффективной жёсткостью системы при
гармоническом возбуждении колебаний.
Таким образом, амплитуда вынужденных колебаний равна амплитуде возмущающей силы, деленной на эффективную жёсткость системы.
Введём понятие |
H |
xcт |
статическая деформация системы |
|
|||
|
C |
|
|
под действием статически приложенной силы Н.
Разделим числитель и знаменатель выражения (54) на жёсткость С.
- 29 -