

2140
.pdfРассматриваем равновесие узла D (рис.87).
Так как в узле сходятся стержни 3, 4, 6 и 7, то показываем усилия этих
yстержней: S3,S4,S6,S7. Составляем уравне-
ния равновесия:
|
S3 |
|
|
S4 |
S6 |
|
|
X |
i |
S |
7 |
S |
6 |
sin S |
3 |
sin 0; |
|||
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
Yi S |
4 S3 cos S6 cos 0. |
||||||||||
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
D |
S7 |
|
|
|
|
|
|
|
|
|
|
S6 и S7 : |
||||
|
|
|
|
|
Находим из этих уравнений |
||||||||||||||
|
|
|
|
Рис.87 |
|
|
|
||||||||||||
S |
6 |
|
S4 S3 cos |
|
|
12 19,09cos45 |
2,12кН; |
|
|
||||||||||
|
|
|
|
|
|
||||||||||||||
|
|
|
|
cos |
|
|
|
cos45 |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
S7 S6sin S3sin ( 2,12)sin45 19,09sin45 15кН.
Рассматриваем равновесие узлаB (рис.88)
|
|
|
y |
|
|
|
Все силы, приложенные к узлу, показываем |
|||||
|
|
|
|
|
|
|
на рис.88: YB,XB,S13,S14. |
|||||
|
|
|
|
|
|
|
||||||
|
YB |
|
|
|
|
|
Составляем уравнения равновесия: |
|||||
|
|
|
XB |
Xi XB S13 S14 cos45 0; |
||||||||
|
|
|||||||||||
|
|
|
|
|
||||||||
S13 |
|
|
|
|
x Yi |
YB S14 cos45 0. |
||||||
|
|
|
|
|
|
|||||||
|
|
|
|
|
||||||||
45o |
|
|
|
Находим из этих уравнений: |
||||||||
S14 |
|
|
S |
|
YB |
|
6,5 |
9,19 кН |
||||
|
|
cos45o |
cos45o |
|||||||||
|
Рис.88 |
|
|
14 |
|
|
|
|||||
S13 XB S14cos45 2 9,19cos45 8,5Н.
Следует обратить внимание на то, что во всех случаях при вычислении усилия того или иного стержня учитываются знаки уже вычисленных усилий. Усилия сжатых стержней записываются отрицательными, а растянутых стержней положительными величинами.
82
|
Рассматриваем равновесие узла F (рис.89). |
|
|
||||
Показываем |
силы, приложенные к узлу: |
|
|
|
|
|
|
S9,S12,S13. |
|
|
|
|
y |
|
|
|
|
|
|
|
|
||
Составляем уравнения равновесия, из кото- |
|
|
|
|
|
|
|
рых находим, что: |
S9 |
|
|
F |
S13 |
||
S12 0; |
|
|
|||||
S9 S13 8,5кН. |
|
|
|
|
|
|
|
|
|
|
|
x |
|||
|
|
|
|
||||
Очевидно, что если в ненагруженном узле |
|
|
|
S12 |
|
|
|
сходятся три стержня, два из которых направ- |
|
|
|
|
|
||
лены по одной прямой, то усилия в них равны
Рис.89
между собой, а усилие в третьем равно нулю.
2.2. Определение усилий в стержнях методом Риттера
Этот метод называется также методом сечений и заключается в том, что ферма рассекается на две части и рассматривается равновесие одной из них.
При этом:
Рассекать ферму следует по стержням и сечение должно проходить по тому стержню, усилие в котором нужно определить.
В сечение должны попасть не более трех стержней, потому что в общем случае силы, приложенные к рассматриваемой части фермы, образуют плоскую произвольную систему сил, для которой только три уравнения равновесия являются независимыми. Чтобы задача имела решение, число неизвестных усилий стержней не должно превышать количества уравнений.
Составлять следует нестандартные уравнения равновесия. Каждое уравнение должно содержать только одно из неизвестных усилий. Поэтому при составлении уравнения моментов, за полюс следует принимать точку Риттера, т.е. точку пересечения двух из трех стержней, попавших в сечение. В отдельных случаях это может быть точка пересечения прямых, являющихся продолжением этих стержней.
Пример. Определить методом Риттера усилия в стержнях S5,S6,S7.
Для этого рассекаем ферму на две части по стержням 5,6,7 и рассматриваем равновесие левой части фермы. Показываем на рис.90 все силы,
приложенные к этой части фермы. Кроме сил RA и P1 показываем усилия
83

стержней, попавших в сечение: S5,S6,S7. |
|
|||
y |
a |
|
P1 |
|
RA |
C |
E |
||
A |
2 |
S5 |
||
|
|
|
|
|
|
3 |
4 |
|
|
|
|
|
S6 |
|
|
|
D |
S 7 |
x |
|
|
|
|
|
|
|
Рис.90 |
|
|
Точками Риттера являются точки D и E. Поэтому составляются следующие уравнения равновесия:
для определения S5уравнение
mD RA a S5 a 0 S5 RA 13,5 кН;
для определения S7 уравнение
mE P1 a RA 2a S7 a 0 S7 P1 RA 2 12 13,52 15 кН;
для определения S6 составляем уравнение
Yi RA P! S6 cos450 0 S6 RA P01 13,5 120 2,12 кН. cos45 cos45
Вопросы по теме 6 для самоконтроля
1.Какую конструкцию в механике называют фермой? Что называют узлом фермы? Чем расчетная модель отличается от реальной фермы?
2.В чем заключается расчет фермы?
3.Какими методами можно определить усилия в стержнях фермы?
4.Чем отличается метод вырезания узлов от метода сечений?
5.Как определить, сжат или растянут тот или иной стержень?
84
6.Почему нельзя найти усилия всех стержней, если в рассматриваемом узле их более двух?
7.Сколько независимых уравнений равновесия сил, приложенных к каждому узлу фермы, можно составить? Какие при этом силы войдут в уравнения?
8.В какой последовательности вырезают узлы фермы?
9.Какие силы войдут в уравнения равновесия при расчете усилий стержней методом сечений?
10.Как находятся точки Риттера и зачем они нужны?
11.Какое наибольшее число стержней может попасть в сечение? 12.В каких стержнях усилия равны нулю?
Курсовая работа С-2
Определение реакций опор и сил в стержнях плоской фермы
При выполнении курсовой работы используйте методику расчета фермы, приведенную в рассмотренном выше примере.
Для этого:
1.Записать условие задачи и сделать рисунок всей фермы, на котором показать все активные внешние силы и реакции связей, наложенных на ферму.
2.Рассмотреть равновесие фермы, составить уравнения равновесия фермы и найти реакции связей.
3.Определить усилия во всех стержнях фермы методом вырезания узлов, рассматривая равновесие каждого узла.
4.Усилия в трех указанных в задании стержнях найти методом сечений (методом Риттера), рассекая ферму на две части и рассматривая равновесие одной из них. При необходимости сделайте еще одно сечение, если сразу все три стержня в сечение не попали.
Вконце задания сделайте таблицу, в которую внесите значе-
ния всех найденных усилий стержней с указанием способа вычисления.
85

|
|
Тема 7 |
|
|
ТРЕНИЕ |
1.Трение скольжения. Коэффициент трения скольжения. |
||
|
Угол и конус трения |
|
Тело A, показанное на рис.91, весом P покоится на неподвижной по- |
||
верхности, т.к. сила тяжести |
P уравновешена нормальной реакцией по- |
|
|
A |
верхности N. Если приложить к телу силу |
|
P |
F, то, не будучи уравновешенной, она выве- |
R |
дет тело из состояния равновесия, сколь бы |
|
N |
малой она не была. |
|
В действительности же происходит ина- |
||
|
F |
че. Тело покидает состояние равновесия, |
Fтр |
только когда эта сила достигает определен- |
|
|
ного значения. |
|
|
Таким образом, равновесия тела имеет |
|
|
Рис.91 |
место при 0 F Fmax. |
Очевидно, до достижения силой Fсвоей максимальной величины |
||
существует сила, уравновешивающая ее. Такой силой является сила трения |
||
до некоторого момента времени, равная силе F и противоположно направленная. Т.е. сила трения по модулю находится из условия
0 Fтр Fтрmax
и направлена в сторону, противоположную скольжению (или возможному скольжению) тела под действием активных сил (в данном случае под дей-
ствием силыF).
Состояние тела, при котором любое увеличение силыFвыведет тело из состояния равновесия, называется предельным состоянием равновесия. Сила трения в этом состоянии достигает своего максимального значения. Эту максимальную величину и будем в дальнейшем называть силой трения.
Сила трения и нормальная реакция Nесть две составляющие реакции неподвижной поверхности. Сложив их, получим полную реакцию непод-
вижной поверхности: R N Fтр .
86

Следует заметить, что модуль нормальной реакции Nзависит от активных сил, приложенных к телу, а сила трения, кроме того, и от состоя-
ния поверхности. Если поверхность абсолютно гладкая, то Fтр=0 и реак-
ция поверхности равна N, направлена по нормали к поверхности. Чем более шероховата поверхность, тем больше реакция поверхности отклоняется от нормального направления. Угол, на который происходит это отклонение, называется углом трения скольжения. Из рис.91 видно, что
tg Fтр , где tg называется коэффициентом трения скольже-
N
ния f , который является величиной безразмерной и равен: f Fтр .
Следовательно, |
N |
|
|
Fтр f N. |
(7.1) |
В общем случае коэффициент трения скольжения зависит от материалов и чистоты обработки соприкасающихся поверхностей тела и неподвижной плоскости. Коэффициент трения скольжения не зависит от величины площади контакта.
Конус трения скольжения получится, если активная сила Fбудет изменять направление, оставаясь при этом в плоскости контакта. Сила
Fтр тогда тоже будет изменяться по направлению, т.е. вектор силы трения будет вращаться в плоскости контакта вокруг точки, в которой она
приложена. При этом очевидно, реакция R опишет конус с вершиной в этой точке. Этот конус называется конусом трения.
Пока сила трения не достигнет своего максимального значения, R будет находиться внутри конуса трения.
При движении тела коэффициент трения скольжения можно считать примерно равным коэффициенту трения скольжения покоя.
Все рассмотренные свойства трения скольжения относятся только к сухому трению и не относятся к тому случаю, когда между телом и плоскостью присутствует смазка.
Законы сухого трения установил в 1781 г. Кулон. Запишем эти законы как выводы из вышеизложенного.
1.Сила трения скольжения находится в общей касательной плоскости соприкасающихся тел и направлена в сторону, противоположную возможному направлению движения тела под действием активных сил.
Величина силы трения зависит от активных сил и заключена между нулем и своим максимальным значением, которое имеет в момент выхода
87
тела из состояния покоя. Это максимальное значение силы и называется силой трения скольжения.
2.Сила трения пропорциональна нормальной реакции, т.е. Fтр f N, где f коэффициент трения скольжения.
2.Трение качения
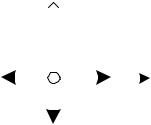
Трение качения возникает при качении одного тела по поверхности другого в результате деформации тел. Колесо, показанное на рис. 92, находится в состоянии покоя на неподвижной поверхности. Сила тяжести колеса уравновешена
Q O

 P
P
N
C

 Fтр
Fтр
Рис.92
силой N. Если к колесу приложить некоторую
силу Q, то возникнет сила трения скольжения , а состояние равновесия тела будет нарушено по причине, что главный момент относительно точки C, показанной на рис.92 системы
сил, не равен нулю, т.е. MC Qr, где r ра-
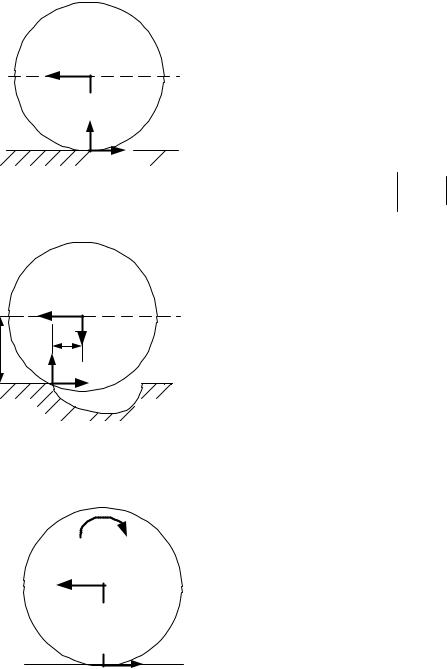
Q |
O |
r1 N |
P |
C |
Fтр |
Рис.93
диус колеса.
В действительности состояние покоя будет
сохраняться до того момента, пока сила Q не достигнет вполне определенной величины. Система сил остается уравновешенной до этого момента по причине того, что в действительности происходит деформация тел, которые не являют-
ся абсолютно твердыми. На рис.93 показано, как
за счет деформации неподвижной поверхности смещается точка контакта.
В результате этого смещения момент силы
Q относительно полюса C будет некоторое
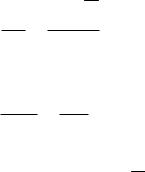
Mсопр
Q O
 P
P
N C
C



 Fтр
Fтр
Рис.94
время уравновешен моментом силы P, т.е.
Qr1 P .
Максимальное значение достигает в момент предельного состояния равновесия. Это максимальное значение называется коэффициентом трения качения, который качения имеет размерность длины.
Показанная на рис. 94 механическая систе-
88

ма эквивалентна механической системе, изображенной на рис. 93.
В дальнейшем механическую систему, на которую действует сопротивление качению, будем изображать именно так, т.е. трение качения учитывать наличием момента сопротивления Mсопр :
Mсопр =P N .
Таким образом,
Mсопр =N . |
(7.2) |
Вывод. Сопротивление качению колеса при наличии трения качения учитывается моментом сопротивления, который направлен в сторону, противоположную возможному направлению вращения колеса, и равен:
Mсопр =N ,
где N нормальная реакция поверхности, зависит от активных сил;коэффициент трения качения, зависит от степени деформации тел.
Вопросы по теме 7 для самоконтроля
1.В случае наличия трения скольжения как направлена реакция опорной поверхности?
2.Какова зависимость между силой трения скольжения и нормальной реакцией?
3.Как учитывается наличие трения качения?
4.Какая величина называется коэффициентом трения скольжения и какую размерность этот коэффициент имеет?
5.Какую размерность имеет коэффициент трения качения? Его физический смысл.
Курсовая работа С-5
Равновесие сил с учетом сцепления
Определить минимальное значение силы P и реакции опор O,A,B системы, находящейся в покое (рис.95).
Дано: G 2кН; T 10
 2кН; коэффициент трения скольжения (коэффициент сцепления) в точке касания барабана 1 и тормозного устройства 2 равен f 0,1; 20 ;размеры на рис. 95 показаны в сантиметрах.
2кН; коэффициент трения скольжения (коэффициент сцепления) в точке касания барабана 1 и тормозного устройства 2 равен f 0,1; 20 ;размеры на рис. 95 показаны в сантиметрах.
89

1 |
T |
O |
R |
|
|
1,5R |
10 |
|
A |
G |
20 |
|
B |
2 |
|
|
P |
|
Рис.95 |
Методика выполнения задания С-5
1. Выбрать тело, равновесие которого следует рассмотреть. Так как система состоит из двух тел, то ее следует расчленить и рассмотреть каждое тело в отдельности. Выполнить рисунок каждого тела (рис.96).
1 |
y |
YO |
|
|
|
|
T |
|
|
|
O NR |
|
||
|
XO |
x |
||
1,5R |
|
|
Fтр |
y |
|
G |
|
|
N |
|
|
|
|
10 |
Fтр  A RA 20
A RA 20
2 B RB
RB
P  x
x
Рис.96
Рассмотрим равновесие барабана 1. На тело действуют заданные силы T и G, а также реакции связей. Реакцию опоры показываем
90
составляющими XO,YO. Силы, с которыми тормозное устройство 2
действовало на барабан: сила трения и нормальная реакция, направленная от тела 2 по нормали к общей касательной двух тел. При этом сила трения направляется в сторону, противоположную перемеще-
нию точки под действием активной силы T .
2.Составляем уравнения равновесия:
mO T R Fтр 1,5R 0;
Xi T Fтр cos Nsin Xo 0;
Yi Ncos Fтр sin YO G 0.
К системе уравнений добавляем уравнение Fтр fN .
Решаем систему уравнений и находим:
F T 10
 2 9,4кН;
2 9,4кН;
тр 1,5 1,5
N Fтр 9,4 94кН;
f 0,1
XO T Fтр cos Nsin 10
 2 9,4cos45 94sin459,2 кН;
2 9,4cos45 94sin459,2 кН;
YO Ncos45 Fтр sin45 G 94cos45 9,4sin45 2
89,6 кН.
3.Рассмотрим равновесие тормозного устройства 2. Силы, приложенные к телу, показаны на рис.96. Обратите внимание на то, что сила трения и нормальная реакция направлены противоположно соответствующим силам, действующим на барабан 1.
Запишем уравнения равновесия:
mA Fтр 10 RB 20 0;
91