

1554
.pdf7.Подать напряжение на обмотку возбуждения ДПТ (тумблер SA23), плавно вращая регулятор R22 установить номинальный ток возбуждения, ток контролировать по прибору PA2.
8.Задать режим работы широтно-импульсного преобразователя
симметричный, |
для этого установить тумблер SA21 в положение |
« имметр.». |
|
9. Включить широтно-импульсный преобразователь (тумблер |
|
SA22). |
|
10. Плавно |
зменяя скважность ШИП от 0 до 100% с помощью |
регулятора задан я «Скважность» (R21), установить номинальное |
|||
напряжен е на якоре ДПТ НВ, напряжение контролировать по |
|||
С |
|
|
|
прибору PV1. |
|
|
|
11. |
Зап сать программу в ПЛК. Запустить функционирование и |
||
монитор нг. |
|
|
|
12. |
Осуществ ть пуск ДПТ НВ (кнопка SB1). ПЛК начнет |
||
работу автомат |
. |
|
|
чески |
|
||
13. |
После окончания переходных процессов отключить |
||
исследуемый ДПТ (кнопка SB1). |
|
||
14. |
Произвести остановку («СТОП») контроллера. |
||
15. |
Перевестибрегуляторы R21, R22 в крайнее левое положение. |
||
16. |
Выключить тум леры SA21, SA22, SA23, SA70. |
||
17. |
Выключить |
питание (три автоматических выключателя |
|
«Сеть»). |
|
|
|
18. |
Разобрать схему. |
|
|
|
А |
||
|
|
|
Д |
|
|
|
И |
51

Лабораторная работа 9 Исследование систем автоматизированного регулирования (САР)
с ПИД-регулятором на основе ПЛК Mitsubishi Electric ALPHA-2
Цель работы:
1) изучение возможностей ПЛК ALPHA-2 как устройства для
управления |
скорости и положения с аналоговыми сигналами |
|
обратных связей; |
|
|
2) |
зучен е основ построения ПИД-регуляторов на базе ПЛК; |
|
3) |
сследовать пр веденные схемы САР. Сравнить с данными с |
|
ЛР5, ЛР17. |
|
|
САР |
|
|
и1. Исследован е следящей системы на потенциометрах с ПИД-регуляторомбна основе ПЛК
1. Собрать схему, как показано на рисунках 33, 34, 35.
А Д Рисунок 33 – Схема измерения рассогласованияИугла на потенциометрах
Рисунок 34 – Схема подключения сигналов обратной связи и исполнительного двигателя САР
52
Си
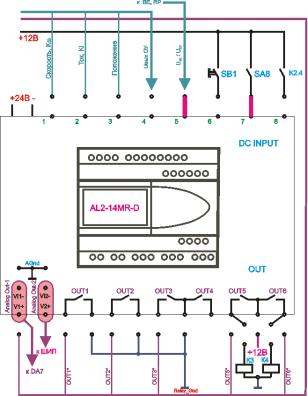
бРисунокА35 – Схема подключения ПЛК к САР
2. Убедиться, что схема со рана правильно и на панели стенда присутствуют только нео ходимые для проведения данного опыта перемычки, все тумблеры (SA2, SA3, SA5, SA6, SA7, SA8, SA25, SA70) находятся в нижнем Дположении («Выключено»). Если необходимо использовать измерительные приборы на панели стенда, должны быть включены тумблеры SA10, SA11.
3. Включить питание стенда (три автоматических выключателя
«Сеть»). И 4. Запустить приложение Mitsubishi Alpha Programming на
компьютере.
5. Присоединить и интерфейсный кабель к ПЛК, для этого может понадобиться извлечь крышку порта связи ПЛК.
6. Открыть имеющийся проект или создать программу для ПЛК
Alpha-2 в Mitsubishi Alpha Programming. Контроллер во время исполнения программы должен по команде с переключателя SA8 включать и отключать следящую систему. При этом заданием системы является сигнал рассогласования потенциометров C1 и С3. Исполнительный двигатель – М3.
53

7. Записать программу в ПЛК. Запустить функционирование и мониторинг.
|
8. Включить следящую систему переключателем SA8. |
||||
|
9. Установите ручку потенциометра C1 в положение 0. |
||||
|
10. Плавно вращая ручку потенциометра C3, снимите |
||||
С |
|
|
|||
|
зависимости URP=f(φ), Uout1=f(φ) и UoutA1=f(φ) с интервалом 300, |
||||
|
на всем обороте. Данные занесите в таблицу 21. |
|
|||
|
|
|
|
|
Таблица 21 |
|
|
|
|
Измерено |
|
|
и |
|
Uout1,В |
UoutA1, В |
|
|
φ,0 |
URP, В |
|
||
|
0 |
|
|
|
|
|
30 |
|
|
|
|
|
60 |
|
|
|
|
|
90 |
|
|
|
|
|
... |
|
|
|
|
11.Установ те ручку потенциометра C1 в крайнее правое положен е.
12.Плавно вращая ручку потенциометра C3, снимите
зависимости URP=f(φ), Uout1=f(φ) и UoutA1=f(φ) с интервалом 300,
на всем обороте. Данные занесите в таблицу 22.бА
|
|
Д |
||
|
|
|
Таблица 22 |
|
|
|
Измерено |
|
|
φ,0 |
URP, В |
Uout1,В |
UoutA1, В |
|
0 |
|
|
|
|
30 |
|
|
|
|
60 |
|
|
|
|
90 |
|
|
И |
|
|
|
|
|
|
... |
|
|
|
|
13.Выключить переключатель SA8.
14.Произвести остановку («СТОП») контроллера.
15.Выключить питание (три автоматических выключателя
«Сеть»).
16.Разобрать схему.
54

2. Исследование САР скорости с ПИД-регулятором на основе
ПЛК
1. обрать схему, как показано на рисунках 36, 37, 38.
Си Рисунок 36б– Схема с ловой части и подключения задания для исследования
С Р ДПТ А Д
Рисунок 37 – Схема системы управленияИСАР ДПТ
2. Убедиться, что схема собрана правильно и на панели стенда присутствуют только необходимые для проведения данного опыта перемычки, все тумблеры (SA2, SA3, SA5, SA6, SA7, SA8, SA25, SA70) находятся в нижнем положении («Выключено»). Если
55

необходимо использовать измерительные приборы на панели стенда, должны быть включены тумблеры SA10, SA11.
3.Включить питание стенда (три автоматических выключателя
«еть»).
Си б
РисунокА38 – Схема подключения ПЛК к САР
4. Подать напряжение на обмотку возбуждения ПТ (тумблер SA23), плавно вращая регулятор R22 установить номинальный ток
возбуждения, ток контролировать по прибору PA2.
5. Запустить приложение Mitsubishi Alpha Programming на |
|
компьютере. |
Д |
6. Присоединить и интерфейсный кабель к ПЛК, для этого |
|
может понадобиться извлечь крышку порта связи ПЛК. |
|
7. Открыть имеющийся проект или создатьИпрограмму для ПЛК
Alpha-2 в Mitsubishi Alpha Programming. Контроллер во время исполнения программы должен по команде с переключателя SA8 включать и отключать САР. При этом задание скорости система получает с потенциометра ДУ. Нагрузка системы устанавливается и ступенчато регулируется кнопкой SB1. Исполнительный двигатель – М1. Нагрузочная машина – М2.
8. Записать программу в ПЛК. Запустить функционирование и мониторинг.
56

9. Задать режим работы широтно-импульсного преобразователя симметричный, для этого установить тумблер SA21 в положение « имметр.».
10. Включить широтно-импульсный преобразователь (тумблер
SA22).
11. Включить САР (переключатель SA8).
12. Плавно изменяя скважность ШИП с помощью регулятора задания (ДУ), разогнать ДПТ НВ, при этом установить скорость равную 50рад/с, скорость контролировать по прибору BR1.
|
13. Включ ть ШИП нагрузочной машины М2 тумблером SA25. |
|||||||
|
14. Изменяя ток нагрузочной машины кнопкой SB1 |
|||||||
С |
|
ору PA3) снять зависимость скорости и тока |
||||||
|
(контрол |
ровать по пр |
||||||
|
|
|
дв гателя от нагрузки. При выполнении опыта, ток |
|||||
|
электродв гателей не должен превышать номинальный. Данные |
|||||||
|
занести в |
цу 23. |
|
|
|
|
||
|
исследуемого |
|
|
Таблица 23 |
||||
|
|
|
|
|
|
|
|
|
|
N |
|
|
|
Измерено |
|
|
Вычислено |
|
|
Iнагр, А |
|
ω, рад/с |
U, B |
I, А |
Мнагр,Н*м |
|
|
1 |
|
табл |
|
|
|
||
|
2 |
|
|
|
|
|
||
|
3 |
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
... |
|
|
А |
|
|
||
15.Отключить САР (переключатель SA8).
16.Произвести остановку («СТОП») контроллера.
17.Повторить пункты 7...16 с разными настройками регулятора (если необходимо). Данные занести в таблицу 23.
18.Перевести регуляторы R22, ДУ в крайнее левое положение.
19.Выключить тумблеры SA21, SA22, SA23, SA25.
20.Выключить питание (три автоматических выключателя
«Сеть»).
21.Разобрать схему. ДИ
57

Лабораторная работа 10 Реализация регуляторов САР на операционных усилителях
и на основе программируемого логического контроллера
Цель работы: |
|
|
||
САР |
|
|
||
1) |
изучение реализации регуляторов САР на операционных |
|||
усилителях; |
|
|
||
2) |
|
зучен е |
основ построения регуляторов на базе |
|
операц онных ус л телей. |
|
|||
3) |
зучен е возможностей ПЛК ALPHA-2 как устройства для |
|||
аналоговыми |
сигналами обратных связей; |
|||
управлен я |
с |
|
||
4) |
зучен е основ построения регуляторов на базе ПЛК. |
|||
1 Реал зац я регуляторов САР на операционных усилителях |
||||
|
б |
|||
1. Собрать схему, как показано на рисунке 39. |
||||
|
|
|
А |
|
|
|
|
|
Д |
|
|
|
|
И |
|
Рисунок 39 – Схема системы управления САР скорости ДПТ |
|||
2. Убедиться, что схема собрана правильно и на панели стенда присутствуют только необходимые для проведения данного опыта перемычки, все тумблеры (SA2, SA3, SA5, SA6, SA7, SA8, SA25, SA70) находятся в нижнем положении («Выключено»). Если необходимо использовать измерительные приборы на панели стенда, должны быть включены тумблеры SA10, SA11.
58

3. Для приведенной схемы пропорционального регулятора скорости (рисунок 1) рассчитайте значение величины сопротивления обратной связи R51 так, чтобы коэффициент передачи регулятора был равен 2 и установите его с помощью регулятора R51.
|
4. Рассчитайте величину постоянной времени данного |
||||
С |
|
|
|
||
|
регулятора. |
|
|
|
|
|
5. Включить питание стенда (три автоматических выключателя |
||||
|
« еть»). |
|
|
|
|
|
6. Плавно |
зменяя задание на входе регулятора (с помощью |
|||
|
R50) сн м те зав с мость UR51=f(UR50). Данные занести в таблицу |
||||
|
и |
|
|
||
24. |
|
|
|
|
|
|
|
|
|
|
Таблица 24 |
|
N |
|
|
Измерено |
|
|
|
UR50,В |
|
UR51,В |
|
|
1 |
|
|
|
|
|
2 |
|
|
|
|
|
3 |
|
|
|
|
|
4 |
|
А |
|
|
|
|
|
|
|
|
|
5 |
б |
|
||
|
... |
|
|
||
7.Выключить питание (три автоматических выключателя
«Сеть»).
8.Разобрать схему.
9.Для приведенной схемы пропорционально-интегрального
регулятора скорости (рисунок 39) рассчитайте значение величины постоянной времени. Д
2 Реализация регуляторов САР на основе программируемого логического контроллера
И
1.Собрать схему, как показано на рисунке 40.
2.Убедиться, что схема собрана правильно и на панели стенда присутствуют только необходимые для проведения данного опыта перемычки, все тумблеры (SA2, SA3, SA5, SA6, SA7, SA8, SA25, SA70) находятся в нижнем положении («Выключено»). Если необходимо использовать измерительные приборы на панели стенда, должны быть включены тумблеры SA10, SA11.
59

С |
|
и |
|
|
б |
|
А |
|
Рисунок 40 – Схема подключения ПЛК к САР |
3. Включить питание стенда (три автоматических выключателя |
|
«Сеть»). |
Д |
4. Запустить приложение Mitsubishi Alpha Programming на компьютере.
5. Присоединить и интерфейсный кабель к ПЛК, для этого может понадобиться извлечь крышку порта связи ПЛК.
|
|
|
|
И |
|
|
|
|
|
Таблица 25 |
|
N |
|
Измерено |
|
|
|
Uin4,В |
|
|
Uout2,В |
|
|
1 |
|
|
|
|
|
2 |
|
|
|
|
|
3 |
|
|
|
|
|
4 |
|
|
|
|
|
5 |
|
|
|
|
|
... |
|
|
|
|
|
6. Используя возможности среды Mitsubishi Alpha Programming,
создать пропорциональный регулятор. Коэффициент передачи
60