

1088
.pdfе р и я в н у т р и в у з о в с к и х СибАДИм е т о д и ч е с к и х у к а з а н и й С и б А Д И
Министерство науки высшего образования Российской Федерации Федеральное государственное бюджетное образовательное учреждение высшего образования
« ибирский государственный автомо ильно-дорожный университет (СибАДИ)» Кафедра «Автомат зация производственных процессов и электротехника»
. . Руппель
ЭЛЕМЕНТЫ ВТОМАТИКИ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПР ВЛЕНИЯ
Методические указания к лабораторным работам
Омск ▪ 2018
УДК 681.51 БКК 32.965.5 Р86
Согласно 436-ФЗ от 29.12.2010 «О защите детей от информации, причиняющей вред их здоровью и развитию» данная продукция маркировке не подлежит.
Рецензент
канд. техн. наук, проф. А.А. Соловьев (СибАДИ)
СибАДИ |
||||||||
|
Руппель, Алексей Александрович. |
|
|
|
||||
Р86 |
Элементы |
автоматики |
и системы |
автоматического управления |
||||
[Электронный |
ресурс] : методические указания к лабораторным |
работам / |
||||||
А.А. Руппель. – (Сер я внутривузовских методических указаний СибАДИ). – |
||||||||
Электрон. дан. – Омск : С бАДИ, 2018. – URL: http://bek.sibadi.org/cgi-bin/ |
||||||||
irbis64r |
plus/cgiirbis |
64 |
ft.exe. - Режим доступа: для авторизованных |
|
||||
пользователей. |
|
|
|
|
|
|
|
|
|
Пр ведены |
основные |
теоретические |
положения |
по |
элементам |
||
автомат ки |
с стемам автоматического управления. Описывается методика |
|||||||
проведен я лабораторных ра от. |
|
|
|
|||||
|
Имеют |
нтеракт вное оглавление в виде закладок. |
|
|
||||
|
Предназначены |
для |
акалавров и |
магистров, |
изучающих по |
|||
направлен ям подготовки « втоматизация технологических процессов и |
||||||||
производств», |
«Управление |
техническими |
системами», «Эксплуатация |
|||||
транспортно-технологических машин и комплексов» следующие дисциплины: «Автоматизация технологических процессов и производств», «Основы телемеханики», «Средства автоматизации и управления», «Управление в технических системах», «Компьютерные технологии автоматизации и управления», «Схемотехника систем и средств управления техническими системами», «Телемеханические системы и средства», «Автоматизация и компьютеризация ТТМО», «Технические измерения и приборы» и выполняющих лабораторные работы, а также могут быть полезны при курсовом проектировании выполнении разделов ВКР.
Подготовлены на кафедре « втоматизация производственных процессов и электротехника».
Текстовое (символьное) издание (455 КБ)
Системные требования: Intel, 3,4 GHz; 150 Мб; Windows XP/Vista/7; DVD-ROM; 1 Гб свободного места на жестком диске; программа для чтения pdf-файлов:
Adobe Acrobat Reader; Foxit Reader
Техническая подготовка В.С. Черкашина Издание первое. Дата подписания к использованию 24.12.2018
Издательско-полиграфический комплекс СибАДИ. 644080, г. Омск, пр. Мира, 5 РИО ИПК СибАДИ. 644080, г. Омск, ул. 2-я Поселковая, 1
ФГБОУ ВО «СибАДИ», 2018
Лабораторная работа № 1
И СЛЕДОВАНИЕ МАГНИТНОГО УСИЛИТЕЛЯ
Цель работы: ознакомление с принципом работы, конструкцией и
снятие |
статических |
характеристик |
магнитного |
СибАДИ |
|||
усилителя с внутренней обратной связью. |
|
||
Пр нц п работы |
рабочий процесс в магнитном усилителе |
||
с внутренней обратной связью |
|
||
В с стемах автоматики довольно широкое применение находят магнитные ус л тели (МУ), ра ота которых основана на нелинейных свойствах некоторых ферромагнитных материалов. Широкому
распространен ю |
МУ спосо ствуют такие их |
качества, как |
|
надежность в |
эксплуатации |
длительный |
срок службы; |
нечувств тельность к механическим воздействиям (ускорениям, ударам, вибрациям), изменениям температуры среды, радиации; высокая перегрузочная спосо ность; большой коэффициент усиления, высокий КПД.
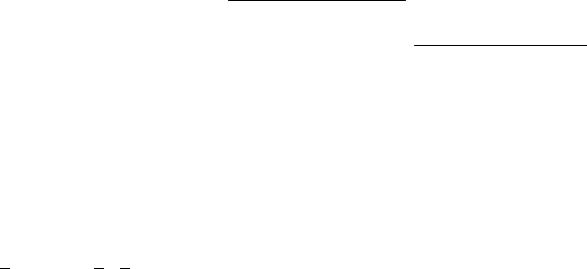
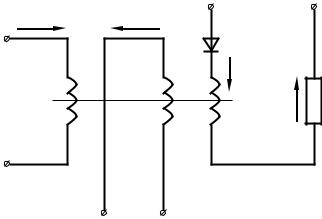
Среди большого числа разновидностей МУ наиболее широкое применение находят МУ с внутренней обратной связью*. Принцип работы такого усилителя можно уяснить на примере однополупериодного МУ с резистивной нагрузкой (рис. 1.1).
|
Iy |
Un |
|
VD |
iн |
|
+ |
. |
|
у |
|
у |
р |
Rн |
|
. |
р |
|
|
|
|
__ |
|
|
МУ |
|
Рис.1.1. Устройство дросселя и схема включения однополупериодного МУ
* В некоторых работах используется термин “МУ с самонасыщением”.
3
Дроссель МУ выполняется на сердечнике тороидальной формы из |
|||||||||
материала с прямоугольной петлей гистерезиса и содержит 2 |
|||||||||
обмотки: обмотку управления у и рабочую обмотку р . |
|
|
|||||||
Наводимая ЭДС практически уравновешивает приложенное |
|||||||||
напряжение, поэтому ток нагрузки в этом интервале, называемый |
|||||||||
намагничивающим током, относительно мал. Его величина |
|||||||||
определяется коэрцитивной силой материала сердечника. |
|
|
|||||||
пец альные |
|
железоникелевые |
сплавы, |
из |
которых |
||||
преимущественно |
|
зготовляют сердечники МУ, имеют коэрцитивную |
|||||||
силу порядка 0,03...0,5 А/см, поэтому при числе витков рабочей |
|||||||||
обмотки в несколько сотен намагничивающий ток имеет порядок в |
|||||||||
С |
|
|
|
|
|
|
|
|
|
несколько м лл ампер. |
|
|
|
|
|
|
|||
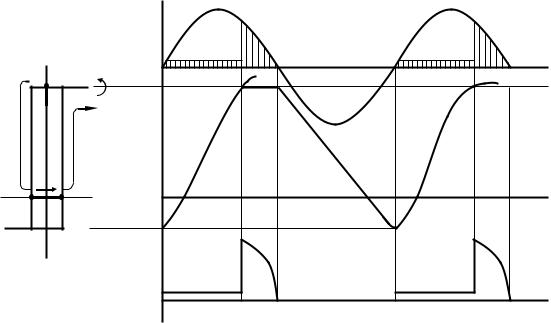
В момент времени t = αн |
/ индукция достигает значения +Bs. |
||||||||
Поскольку дальнейш й рост ее невозможен, ЭДС самоиндукции ер |
|||||||||
станов тся равной нулю, а ток и напряжение на нагрузке резко |
|||||||||
возрастаютнапряжения. Форма |
на нагрузке представляет собой |
||||||||
усеченную полуволну синусоиды (рис. 1.2, б). Фазовый угол, |
|||||||||
соответствующ й моменту насыщения сердечника, называют углом |
|||||||||
насыщения, от него зависит среднее значение напряжения на |
|||||||||
нагрузке. |
б |
|
|
|
|
||||
а) |
|
) |
|
|
|
|
|
|
|
|
|
|
Un |
Uн |
|
|
Uн |
|
|
|
|
|
|
|
|
|
|
|
|
B |
|
|
А |
|
|
|
|||
2’ |
+Bs |
0 |
|
Д |
t |
||||
2 |
|
|
+Bs |
|
|||||
|
|
|
B |
|
|||||
|
H |
0 |
|
t |
|||||
1’ |
1 |
|
|
|
|
И |
|||
-Bs |
|
+B1 |
iн |
|
|||||
|
|
|
|||||||
|
|
|
|
|
|
||||
|
|
0 |
н |
|
|
2 |
2 + н |
|
t |
|
|
|
|
|
|
||||
Рис.1.2. Перемещение рабочей точки МУ по петле гистерезиса (а) и временная |
|||||||||
|
диаграмма (б) |
|
|
|
|
|
|
||
|
|
|
|
|
4 |
|
|
|
|
Изменение индукции вызывает появление на зажимах рабочей |
||||||||
обмотки ЭДС самоиндукции: |
eр = ωр· Q · dB / dt , |
|
||||||
где Q – сечение сердечника. |
|
|||||||
|
|
|
|
|||||
В свою очередь αн определяется начальным значением индукции |
||||||||
B1, которое является функцией входного тока Iу. При некотором |
||||||||
значении |
Iy = Iy max |
индукция B1 такова, что время намагничивания |
||||||
сердечн ка станов тся равным половине периода, при этом αн = π; |
||||||||
Uн.ср = 0. Этот реж м называют режимом минимального выхода. |
||||||||
Уменьшен е тока Iy вызывает перемещение точки 1 на петле |
||||||||
гистерез са вверх; время, необходимое для перемагничивания |
||||||||
С |
ндукции |
+Bs |
, сокращается, что приводит к |
|||||
сердечн ка |
до |
|
||||||
уменьшен ю угла αн |
увеличению напряжения на нагрузке. Если Iy = |
|||||||
0, то перемещен я ра очей точки вниз в отрицательные полупериоды |
||||||||
не про сход т, |
|
к началу очередного положительного полупериода |
||||||
я станов тся равной +Bs. Угол насыщения в этом режиме |
||||||||
индукц |
|
|
|
|||||
ранен нулю, а напряжение на нагрузке максимально. Аналитическая |
||||||||
зависимость между выходной Uн.ср. и входной Iy величинами |
||||||||
достаточно сложна и для практических расчетов неудобна. |
||||||||
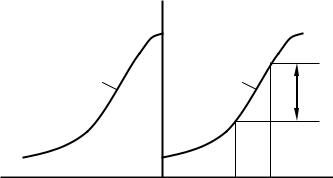
Поэтомубна практике о ычно пользуются характеристиками "вход- |
||||||||
выход", снятыми экспериментально (рис. 1.3, кривая 1). В своей |
||||||||
средней части такие характеристики достаточно хорошо |
||||||||
аппроксимируются прямыми линиями. |
|
|
||||||
|
|
|
А |
|
||||
|
|
|
|
|
|
Iн |
|
|
|
|
|
|
1 |
|
2 |
|
Iн |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Д |
||
|
|
|
|
|
|
|
Iу |
|
|
|
Iсм |
|
|
|
|
Iу |
|
|
|
|
|
|
|
|
И |
|
|
|
|
Рис.1.3. Характеристики “вход-выход” МУ: |
|||||
|
|
|
|
1 – Iсм |
= 0; 2 – Iсм = Iy max |
|
||
Такой вид характеристики, когда увеличение абсолютного |
||||||||
значения входной величины приводит к уменьшению выходной, не |
||||||||
всегда удобен. |
|
|
|
|
|
|
|
|
5
Поэтому на сердечнике обычно размещают еще одну |
обмотку – |
||||||||||
обмотку смещения ωн, ток которой |
при |
настройке устанавливается |
|||||||||
равным Iсм = Iy max и в дальнейшем не изменяется. Обмотка управления |
|||||||||||
включена навстречу обмотке смещения (рис. 1.4),поэтому увеличение |
|||||||||||
управления приводит к снижению общей управляющей |
|||||||||||
намагничивающей силы, а значит, и к увеличению выходного |
|||||||||||
напряжения. |
|
|
|
|
|
|
|
|
|
|
|
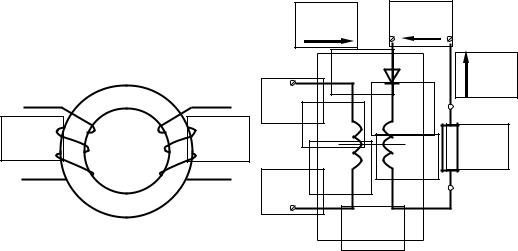
На обмотку управления поступает усиливаемый входной сигнал в |
|||||||||||
виде постоянного напряжения Uy. Рабочая обмотка включается |
|||||||||||
последовательно с нагрузкой Rн. Питание усилителя производится |
|||||||||||
переменным с нусо дальным напряжением через диод VD. Для |
|||||||||||
С |
|
|
|
|
|
|
|
|
|||
нормальной работы ус лителя токи в обмотках ωу и ωсм должны быть |
|||||||||||
противоположны. |
|
|
|
|
|
|
|
|
|||
В отр цательные полупериоды питающего напряжения ток в |
|||||||||||
рабочей |
|
|
отсутствует (UН = 0), поэтому магнитное состояние |
||||||||
сердечн |
ка определяется |
|
величиной входного тока. |
|
|||||||
лишь |
|
|
|
|
|
|
|||||
|
|
|
|
|
I y Uвх , |
|
|
|
|
||
|
|
|
|
|
|
Ry |
|
|
|
|
|
где Ry – сопротивление цепи о мотки управления. |
|
|
|||||||||
|
обмотке |
|
|
|
|
||||||
Пусть величина тока управления такова, что к концу |
|||||||||||
отрицательного полупериода индукция в сердечнике равна В1 (точка 1 |
|||||||||||
на петле гистерезиса (рис. 1.2, а)). В начале положительного |
|||||||||||
полупериода |
к |
рабочей обмотке через диод прикладывается |
|||||||||
|
|
|
|
А |
|
|
|||||
напряжение Un = Unm sin ωt, вследствие чего сердечник начинает |
|||||||||||
перемагничиваться и индукция возрастает, стремясь к значению +Bs. |
|||||||||||
|
|
|
|
Iу |
|
Iсм |
|
Un |
|
|
|
|
|
|
+ |
|
|
|
|
|
|
||
|
|
|
|
|
Д |
||||||
|
|
|
|
|
|
||||||
|
|
|
|
. |
|
. |
. |
VD |
|
|
|
|
|
|
Uу |
|
iн |
|
|
|
|||
|
|
|
|
|
см |
|
|
Uн |
Rн |
|
|
|
|
|
|
у |
|
|
|
р |
|
|
|
|
|
|
|
|
|
Uсм |
|
И |
|||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
|
|
|
|
|
|
|
|
Рис.1.4. Схема МУ с обмоткой смещения |
|
|
|||||
6

Если ωу = ωсм, то режим максимального |
выхода имеет место |
при Iу = Iсм, а характеристика "вход-выход" смещается вправо и |
|
приобретает вид кривой 2 (см.рис.1.3). |
|
На практике чаще используются двухполупериодные МУ. |
|
Дроссель такого усилителя (рис. 1.5) выполняется на двух |
|
сердечниках Qа и Qв, рабочие обмотки ωра, ωрв расположены каждая |
|
на своем сердечнике, обмотки смещения |
управления являются |
СибАUн.ср. 2 Uн 1 Дcos н , И
общими охватывают оба сердечника.
Qа |
ра |
ра |
у |
|
|
см |
|
|
Qв |
|
рв |
Рис.1.5. Конструкция дросселя двухполупериодного МУ
Напряжение на нагрузке такого МУ при прочих равных условиях
вдвое больше, чем однополупериодного:
а коэффициент пульсации – вдвое меньше. Кроме дросселя, двухполупериодный МУ содержит 2 или более диодов. В зависимости от способа соединения рабочих обмоток МУ может
иметь выход постоянного или переменного тока.
7
|
|
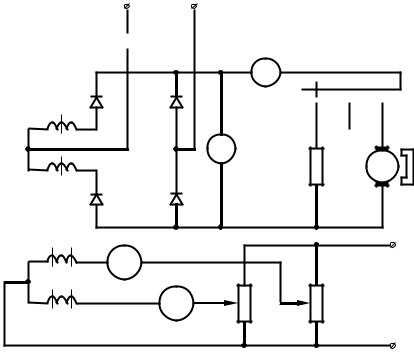
Описание лабораторного стенда |
|
|
|||||
Лабораторный стенд содержит двухполупериодный магнитный |
|||||||||
усилитель, блок питания с силовым трансформатором и |
|||||||||
выпрямителем и измерительными приборами для измерения токов |
|||||||||
нагрузки, управления, смещения и входного напряжения. |
|
||||||||
хема для испытания МУ приведена на рис. 1.6. |
|
|
|||||||
В качестве нагрузки при испытании МУ применяется |
|||||||||
осветительная лампа 24 В, З0 Вт или двигатель постоянного тока. |
|||||||||
Резисторы |
переменного |
сопротивления |
R1, |
R2 |
включенные |
||||
потенц |
|
, служат для регулирования токов смещения и |
|||||||
С |
|
|
|
|
|
|
|
||
управлен я. |
|
|
|
|
|
|
|
|
|
|
|
|
24 В |
|
|
|
|
|
|
ометрами |
|
|
|
|
|
||||
|
|
|
S1 |
|
|
|
|
|
|
|
|
|
|
|
A |
|
S1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
VD2 |
|
|
|
|
|
|
|
бVD1 |
|
|
|
|
||||
A . |
|
X |
|
V |
|
|
|
|
|
Y |
. |
B |
|
Rн |
|
|
|
||
|
|
M |
|
|
|||||
|
|
|
|
|
|
|
|||
|
|
VD3 |
|
|
|
|
|
|
|
|
|
АVD4 |
|
|
|||||
|
H1 . |
см K1 mA |
|
R1 |
|
|
+ |
|
|
|
|
|
|
mA |
|
R2 |
= 12 В |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
||
|
K2 |
. |
H2 |
|
Д |
||||
|
|
у |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис.1.6. Схема испытания МУ |
|
|
||||
|
|
|
|
|
|
|
И |
||
|
|
Вопросы для допуска к работе |
|
|
|||||
1.На чем основана работа магнитного усилителя?
2.Перечислите преимущества и недостатки магнитного усилителя.
3.Какие материалы применяются для сердечника дросселя магнитного усилителя?
8

3адание
1. Изучить конструкцию, схему включения и рабочий процесс двухполупериодного МУ. Снять и построить характеристики
управления МУ: |
|
С |
Iн = f2(Iy), при Icm = const. |
2. Рассчитать и построить зависимость выходной мощности МУ от |
|
входной мощности.
3. Определ ть коэфф ц енты усиления по току и мощности .
4. Определ ть пр мерный диапазон регулирования скорости вращения двигателя постоянного тока, используемого в качестве нагрузки МУ.
Порядок выполнения работы
1. Установ ть переключатель S1 в положение "Резистивная нагрузка"
и включ ть стенд. |
резисторов R1 и R2 установить нулевые |
значен я токов управления |
смещения. |
2. Не меняя положен я ручки R1, снять зависимость Iн = f1(Iу). |
||||||||||
Ручками |
|
|
= 5 mA. Изменяя Iу от 0 до |
|||||||
3. Установ ть вел ч ну тока смещения Icм |
||||||||||
|
б |
|
f2(Iy). Продолжить |
|||||||
максимального значен я, снять зависимость Iн = |
||||||||||
|
5 |
А |
|
|
|
|||||
снятие |
характеристик при Iсм |
= 10, 15, |
20, 25 |
mA. |
Результаты |
|||||
измерений и вычислений заносятся в табл. 1.1. |
|
Таблица 1.1 |
||||||||
Iсм , |
|
Iy , |
|
Py , |
|
Iн , |
Uн , |
Pн , |
|
|
мА |
|
мА |
|
Вт |
|
|
|
В |
Вт |
|
|
|
|
|
|
|
Д |
|
|
||
0 |
|
0 |
|
|
|
|
|
|
|
|
|
|
10 |
|
|
|
|
|
|
|
|
|
|
15 |
|
|
|
|
|
|
|
|
|
|
20 |
|
|
|
|
|
|
|
|
|
|
25 |
|
|
|
|
|
|
|
|
5 |
|
0 |
|
|
|
|
И |
|
||
|
|
5 |
|
|
|
|
|
|||
|
|
10 |
|
|
|
|
|
|||
|
|
15 |
|
|
|
|
|
|||
|
|
20 |
|
|
|
|
|
|||
|
|
25 |
|
|
|
|
|
|||
10 |
|
0 |
|
|
|
|
|
|
||
|
|
5 |
|
|
|
|
|
|
|
|
|
|
10 |
|
|
|
|
|
|
|
|
|
|
15 |
|
|
|
|
|
|
|
|
|
|
20 |
|
|
|
|
|
|
|
|
|
|
25 |
|
|
|
|
|
|
|
|
и т. д. |
|
|
|
|
|
|
|
|
|
|
9
|
Примечание. |
Мощности управления и нагрузки рассчитываются |
||||||||||||||
по формулам: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Py = Iy2 Ry , |
|
Pн = Uн ·Iн , |
|
|
|
|
|
||||||||
где Rу – сопротивление цепи управления, Ry = 500 Ом. |
|
|
||||||||||||||
4. |
Включить в качестве нагрузки двигатель постоянного тока и |
|||||||||||||||
СибАДИ |
||||||||||||||||
повторить измерения. Результаты занести в таблицу. Определить |
||||||||||||||||
ориент ровочно |
д апазон |
устойчивого регулирования скорости |
||||||||||||||
вращен я: |
|
|
|
|
|
|
|
|
U |
|
|
|
|
|
|
|
|
|
|
|
|
|
max |
|
U я min |
|
|
||||||
|
|
|
|
|
min |
|
|
|
|
|||||||
5. |
По данным та л. 1.1 построить характеристики управления |
Iн = |
||||||||||||||
fn(Iy) и зав с мости Рн = fn(Ру). |
|
|
|
характеристиками, |
определить |
|||||||||||
6. |
Пользуясь |
построенными |
|
|
|
|||||||||||
коэфф ц енты ус лен я по току к мощности: |
|
|
||||||||||||||
|
|
K |
i |
|
Iн |
, |
|
K |
p |
|
Pн . |
|
|
|||
|
|
|
|
I |
у |
|
|
|
|
P |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
вх |
|
|
|
|
|
Содержание отчета |
|
|
||||||||||||
1. |
Наименование ра оты и ее цель. |
|
|
|
|
|
|
|
||||||||
2. |
Задание. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3. |
Электрическая схема испытания МУ. |
|
|
|
|
|||||||||||
4. |
Табл.1.1 с результатами измерений и вычислений. |
|
|
|||||||||||||
5. |
Характеристики управления |
|
график зависимости IH = f( Iy ) и |
Рн = |
||||||||||||
f(Py) с расчетами коэффициентов усиления. |
|
|
||||||||||||||
6. |
Результаты определения диапазона регулирования двигателя. |
|
||||||||||||||
|
|
|
|
Вопросы к защите |
|
|
||||||||||
1. |
В чем преимущества двухполупериодного МУ перед |
|||||||||||||||
однополупериодным? |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
2. |
Какова роль обмотки смещения МУ? |
|
|
|
|
|||||||||||
3.Какие основные требования предъявляются к материалу магнитопровода МУ?
4.Что изменится в магнитном усилителе, если потребуется усиление разности двух сигналов?
10