

1088
.pdfбудет выполняться условие Ip = 0. Если перемещение движка |
|||||||
реохорда будет осуществляться вдоль шкалы, то каждое его |
|||||||
положение относительно шкалы будет соответствовать определенной |
|||||||
величине термоЭДС и, следовательно, определенной температуре. |
|||||||
С |
|
|
c |
R1 |
|
|
|
|
R2 |
|
|
R5 |
|
||
|
|
GB |
|
R6 |
b |
||
|
|
|
|
|
|||
B |
|
R3 |
|
|
|
||
|
|
R4 |
|
|
|||
и |
|
|
|||||
Ip |
d |
|
|
||||
|
|
|
|
||||
Р с.4.1. Схема |
змерения термоЭДС методом компенсации |
||||||
При неавтоматической компенсации перемещение движка |
|||||||
реохорда |
б |
В |
автоматических |
||||
осуществляется |
вручную. |
||||||
потенциометрах вместо нульиндикатора включают электронный |
|||||||
усилитель, в котором ток после преобразования (модуляции) |
|||||||
усиливается и подается на обмотку двигателя, перемещающего |
|||||||
движок реохорда доАкомплектации термоЭ С, т.е. до тех пор, пока |
|||||||
ток на входе усилителя не станет равным нулю. |
|
||||||
|
Описание лабораторного стенда |
|
|||||
|
|
|
|
Д |
|||
Лабораторный стенд включает в себя электронный автомати- |
|||||||
ческий потенциометр, автотрансформатор, промежуточное реле, |
|||||||
нагревательный элемент, термопару, источник постоянного на- |
|||||||
пряжения, регистрирующие приборы и коммутирующие элементы. |
|||||||
Схема электронного автоматического потенциометра для измерения |
|||||||
|
|
|
|
|
|
И |
|
термоЭДС термопары представлена на рис.4.2. Термопара |
|||||||
подключается в диагональ моста измерительной схемы после- |
|||||||
довательно с вибропреобразователем U , в результате чего при |
|||||||
появлении напряжения небаланса U = EB – UGB1 оно преобразуется в |
|||||||
переменное напряжение и через трансформатор Т |
подается на вход |
||||||
усилителя А. |
|
|
|
|
|
|
|
31
Вибропреобразователь состоит из П-oбразного |
постоянного |
магнита, в середине которого находится упругая стальная пластина с |
|
одним неподвижно закрепленным концом, а другим – свободным. На свободном конце закреплен контакт К. Пластина является сердечником катушки L , по которой протекает переменный ток частотой 50 Гц. Взаимодействие магнитного поля постоянного магнита и переменного магнитного поля, создаваемого катушкой, вызывает в брац ю пластины с частотой 50 Гц. При этом контакт К поочередно замыкается с двумя неподвижными контактами. В
результате этого напряжение U подается поочередно на одну или |
||||||||
другую полов ну перв чной обмотки трансформатора Т и вызывает |
||||||||
С |
|
|
|
|
|
|
|
|
|
тока различного направления, которые создают |
|||||||
переменный магн тный поток, индуктирующий во вторичной |
||||||||
обмотке электродв жущую силу с частотой 50 Гц. При изменении |
||||||||
полярности |
напряжен я |
не аланса |
напряжение |
на |
вторичной |
|||
обмотке |
зменяется |
по |
|
фазе |
на 1800. |
Таким |
образом, |
|
импульсы |
|
|
|
|
|
|||
преобразованное (модулированное) напряжение подается на вход |
||||||||
лампового электронного усилителя . |
Необходимость в модуляции |
|||||||
объясняется |
тем, что усилители переменного |
тока |
не |
имеют так |
||||
называемогоб«дрейфа нуля» и, таким образом, не вносят |
||||||||
погрешностей в измеряемую величину. |
|
|
|
|
||||
Электронный усилитель автоматического потенциометра имеет |
||||||||
предварительный усилитель |
(усиление |
сигнала по напряжению при |
||||||
Iвх = const) и выходной каскад (усиление сигнала по мощности с |
||||||||
|
А |
|
|
|||||
помощью фазочувствительного усилителя). Усиленный сигнал далее |
||||||||
подается на обмотку управления двухфазного двигателя М, который через зубчатую передачу и гибкие связи с помощью нити перемещает
движок реохорда R1, компенсируя термоЭ |
С, а также перемещает |
|
стрелку шкалы, проградуированнойДв градусах Цельсия для данной |
||
термопары, и вращает полумуфту механизма схемы корректировки. |
||
Схема корректировки необходима в связи с тем, |
что ЭДС |
|
элемента GB1 со временем уменьшается (элемент расходует энергию |
||
во время компенсации), что сказывается на точности измерения. Для |
||
И |
||
корректировки периодически на короткий |
промежуток |
времени |
необходимо нажать кнопку S (см. рис.4.2). При этом контакт SB отключит термопару от преобразователя и соответственно усилителя, а подключит к ним эталонный нормальный элемент GB2 и сопротивление R7. Таким образом, GB1 и GB2 окажутся подключенными встречно к сопротивлению R4, образуя новую схему
32
компенсации. Одновременно полумуфта механизма корректировки, связанная с двигателем М, войдет в зацепление с полумуфтой,
связанной в движком переменного сопротивления R6. Если величина |
|||||
ЭДС GB1 отличатся от номинальной, то в этом случае разность |
|||||
падения напряжений на R4 от обоих источников будет подаваться на |
|||||
С |
и усилитель, |
а затем, |
усиленная, на двигатель М, |
||
преобразователь |
|||||
который будет |
перемещать |
движок |
R6 до компенсации этой |
||
разности, т.е. до тех пор, пока на входе усилителя ток не станет |
|||||
близким к нулю. При значительном истощении элемента GB1, когда |
|||||
возможности коррект рующей схемы исчерпаны, необходимо |
|||||
стабил |
|
приборы, |
где применяются |
||
заменить батарею |
GB1. Существуют |
||||
з рованные |
сточники питания. В |
этих приборах |
|||
необход мость в корректирующей схеме отпадает. |
|
||||
Для увел чен я точности |
|
сопротивление R3 мостовой |
|||
прибора |
|
|
|||
схемы выполнено |
з меди и расположено вблизи холодного спая |
||||
термопары. Так м о разом, оно имеет одинаковую с холодным спаем температуру. Изменен е температуры холодного спая термопары компенс руется температурным изменением сопротивления и обеспечивает постоянствоАградуированного значения термопары.
Кроме показаний температуры, приборы типа ЭДР могут осуществлять запись температуры в полярных координатах. Для этих целей имеется перо, которое перемещается по круговой диаграмме в соответствии с изменением температурыД. Вращение диаграммы обеспечивается дополнительным двигателем.
Потенциометр может использоваться и для регулирования температуры. Для этих целей имеется встроенный релейный регулятор, устройство которого показано на схеме потенциометра (см. рис. 4.2).
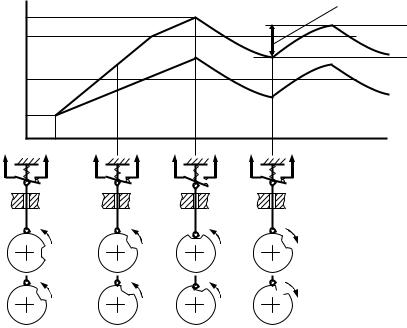
На валу, вращаюшемся при работе двигателяИ, укреплен кулачок, профиль которого обеспечивает включение контакта SQ во времени. С помощью контакта можно управлять включением нагревателя и, следовательно, температурой объекта. Таких кулачков и контактов может быть несколько, что позволяет управлять какой-либо промежуточной схемой управления и обеспечивать различные законы нагрева. В простейшем случае, когда кулачок имеет впадину и управляет размыкающимся контактом, с помощью потенциометра может поддерживаться постоянство температуры, величина которой зависит от начального положения кулачка (рис.4.3). Начальное положение кулачка регулируется ручкой “Установка регулятора” на передней панели прибора.
33
|
T2m |
|
Зона нечувствительности |
|
|
|
|
|
T2ср |
|
|
|
T1ср |
|
|
|
T0 |
tз |
|
|
|
t |
|
|
0 |
|
|
|
|
|
|
|
|
|
для T2ср |
|
|
|
для T1ср |
|
|
Р с.4.3. Ра ота регулятора после включения потенциометра, tз – время |
|
|
|
|
запаздывания |
|
|
|
Вопросы для допуска к работе |
1. |
Как измеряют ЭДС компенсационным методом? |
||
2. |
Почему в автоматических потенциометрах применяют мостовые |
||
схемы? |
|
|
|
3. |
Достоинства компенсационного метода измерения. |
||
|
|
|
Задание на выполнение работы |
1. |
Изучить конструкцию и работу схемы автоматического элект- |
||
ронного потенциометра. |
|||
2. |
Снять показания |
построить график изменения температуры во |
|
времени T=f(t) при заданном положении регулятора. При этом |
|||
определить: время запаздывания; среднюю температуру; зону |
|||
СибАДИ |
|||
нечувствительности регулятора по температуре. |
|||
3. |
Определить постоянную времени прибора как время, которое |
||
необходимо для достижения температуры Т = 0,63 Tm . |
|||
34
|
|
|
|
|
|
|
Порядок выполнения работы |
|
|
|
|||||
1. |
Установить выключатель S3 в положение «В», S2 – в положение |
||||||||||||||
"0". |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
2. |
Включить выключатель S1 (сеть), при этом должна загореться |
||||||||||||||
С |
|
|
|
|
|
|
|
|
|
||||||
|
сигнальная лампочка стенда Н и лампа на лицевой панели прибора. |
||||||||||||||
|
Подождать 1–2 мин, прогревая лампы электронного усилителя |
||||||||||||||
|
потенц ометра. |
|
|
|
|
|
|
|
|
|
|||||
3. |
Установ ть автотрансформатором Т заданное напряжение (задаётся |
||||||||||||||
|
преподавателем), контролируя его по вольтметру U1. |
|
|
|
|||||||||||
|
показания |
|
и определить время |
запаздывания |
|||||||||||
4. |
Включ ть |
выключатель |
S2 |
|
|||||||||||
|
(время от |
начала зменения |
входной величины, т.е. тока через |
||||||||||||
|
нагревательный элемент, до начала изменения выходной величины – |
||||||||||||||
|
температуры). |
мость Т=f(t) (рис.4.3) в процессе регулирования, для |
|||||||||||||
5. |
Снять зав с |
||||||||||||||
|
чего зап сывать |
|
|
при ора через каждые 10 с в течение 5 |
|||||||||||
|
мин. |
|
% от Тm и согласно п.3 найти постоянную времени |
||||||||||||
6. |
Найти |
63 |
|||||||||||||
|
потенциометра. |
А |
|
|
|
||||||||||
7. |
По даннымбп. 5 построить зависимость T=f(t), указать время |
||||||||||||||
|
запаздывания, зону нечувствительности, Tср . |
|
|
|
|||||||||||
8. |
Результаты измерений занести в табл. 4.1. |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
Д |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 4.1 |
||
|
|
t , c |
|
0 |
|
|
10 |
|
20 |
|
|
. . . . . |
|
300 |
|
|
|
T , 0 C |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Содержание отчета |
|
|
|
||||
1. |
Название работы, ее цель. |
|
|
|
И |
||||||||||
|
|
|
|
|
|
|
|||||||||
2. |
Электрическая схема измерения ЭДС методом компенсации. |
||||||||||||||
3. |
Таблица замеров T=f(t). |
|
|
|
|
|
|
|
|||||||
4. |
График T=f(t) с указанием времени запаздывания, зоны |
||||||||||||||
|
нечувствительности, Tср. |
|
|
|
|
|
|
|
|||||||
5. |
Расчет постоянной времени прибора. |
|
|
|
|
||||||||||
35

СибАДИ |
|
||||||
|
|
|
C |
|
|
|
|
|
|
|
M |
|
|
|
|
|
|
|
|
|
|
T, C |
|
SQ |
|
|
|
|
|
Корректировка |
|
|
|
R1 |
|
|
|
T |
|
|
|
|
|
SB |
|
K |
A |
|
R2 |
|
R5 |
|
|
|
35 |
|
|
|
R6 |
|
|
|
|
|
R3 |
|
R7 |
|
|
U |
|
Регулятор |
R4 |
GB2 |
|
|
|
||
|
|
|
|
|
|
||
|
GB1 |
|
|
|
|
|
|
|
B |
|
|
|
|
|
|
Рис.4.2. Схема автоматического потенциометра для измерения |
регулирования температуры |
|
|||||
|
|
|
36 |
|
|
|
|
Контрольные вопросы
1. Как производится измерение компенсационным методом в данном потенциометре?
СибАДИ |
|||
2. |
Как в приборе компенсируется истощение рабочего элемента GВ1? |
||
3. |
Как работает регулятор потенциометра? |
||
4. |
От чего зав |
с |
т вел чина зоны нечувствительности? |
5. |
Oт чего зав |
с |
т продолжительность запаздывания? |
6. |
Почему в потенц ометре применен электропривод переменного |
||
тока? |
|
|
|
7. |
От чего зав с т постоянная времени потенциометра? |
||
37
Лабораторная работа № 5
ИССЛЕДОВАНИЕ РАБОТЫ СЛЕДЯЩЕГО ПРИВОДА
Цель работы: изучение принципа действия электрической следящей |
||||||
С |
и |
экспериментальное |
определение |
|||
|
|
системы |
||||
|
|
статической ошибки. |
|
|
||
|
|
|
Общие положения |
|
||
изменяющейся |
это |
устройства автоматического |
||||
ледящ |
|
с стемы |
– |
|||
управлен , предназначенные |
для |
воспроизведения величины, |
||||
|
|
по про звольному закону. |
|
|||
ледящ |
|
стемы можно разделить на две основные группы: |
||||
|
обратных |
|
||||
а) самос нхрон |
рующиеся следящие системы; |
|
||||
б) следящ |
|
стемы с искусственной внешней синхронизацией |
||||
при помощи |
связей. |
|
|
|
||
К самос нхрон з рующимся следящим системам, в которых с |
||||||
определенной |
А |
синхронное и |
||||
степенью |
точности осуществляется |
|||||
синфазное перемещение двух или нескольких не связанных между собой механических валов, относятся следящие приводы. Следящим приводом называется устройство, при помощи которого объект регулирования с определенной точностью воспроизводит движение, задаваемое следящим органом.
Следящий привод, включающий элементы автоматического управления, позволяет воспроизводить требуемые перемещения в
широких |
пределах по произвольному закону от устройства |
||
(датчика), |
|
|
И |
задающего этот закон, что обуславливает его широкое |
|||
применение. |
Следящий |
приводДможет использоваться для |
|
автоматического контроля |
за изменением различных физических |
||
величин, для автоматического управления поворотом массивных платформ на заданный угол, например, в экскаваторах, в системе автоматического вождения автомобиля, при автоматизации процессов управления землеройно-планировочными машинами.
В данной работе рассматривается синхронно следящий привод, который состоит из сельсина-датчика (задающий орган, сельсинатрансформатора (датчика угла поворота объекта), фазочувствительного электронного усилителя и исполнительного двигателя, перемещающего какой-либо объект. Структурная схема следящего привода приведена на рис.5.1.
38

ЗО |
У |
ИО |
О |
ЭС
Д
Рис. 5.1. Структурная схема следящего привода: ЗО – задающий орган; СибАДИУ – усилитель; ИО – исполнительный орган; О – объект
регул рован я; Д – датчик; ЭС – элемент сравнения
Элементы следящего привода соединены между собой так, что изменен е в положении датчика воздействует через элемент сравнен я ус л тель на исполнительный двигатель, который отрабатывает заданную величину перемещения. Процесс работы следящего пр вода сводится к автоматическому устранению возникающего рассогласования.
Синхронноследящ е приводы с электронными усилителями обладают следующ ми достоинствами:
1)быстрое протекан е переходных процессов благодаря сравнительно малой инерционности системы управления; 2)отсутствие вращающихся и трущихся частей в усилителе.
К недостаткам системы можно отнести:
1)ограниченную мощность исполнительного двигателя;
2)сравнительно большую ошибку в слежении при установившемся режиме; 3)чувствительность работы системы к колебаниям напряжения сети.
Особенности работы системы синхронно следящего привода выявляются при анализе ее статических и динамических характеристик.
Под статическими характеристиками следящего привода понимают зависимость момента, тока других параметров в схеме от величины угла рассогласования в установившемся режиме, когда отработка угла исполнительным двигателем происходит с неизменной скоростью. Однако только статические характеристики неполно характеризуют работу следящего привода. Необходимо, кроме статических характеристик, знать также и динамические свойства системы, определяющие устойчивость, величину угла рассогласования в переходном режиме, время переходного режима и т.п. Эти свойства системы анализируются на основании уравнений переходного режима.
39
В данной работе изучаются только статические характеристики. Важной характеристикой следящего привода является статическая ошибка, которая в данном случае представляет собой разность между углом поворота ротора сельсина-датчика
(задающий орган) и углом поворота объекта (вала исполнительного двигателя). Статическая ошибка измеряется после прохождения всех переходных процессов, после полной остановки двигателя.
СибАДИмаломощных следящих приводов. На валу исполнительного двигателя находится стрелка, которая в данном случае является объектом регулирования. Стрелка перемещается по круговой шкале.
татическая ош бка зависит от состояния вращающихся частей: трения, момента сопротивления повороту двигателя, от колебаний
напряжен я сети |
от нерционности вращаемого объекта. |
|
|
Вопросы допуска к лабораторной работе |
|
1. |
Что следует пон мать под следящей системой и следящим |
|
приводом? |
|
|
2. |
Область пр менен я следящего привода. |
|
3. |
Элементы следящего привода. |
|
4. |
Достоинства |
недостатки синхронно-следящего привода с |
электронным усилителем. |
||
5. |
Характеристики, применяемые при анализе работы синхронно |
|
следящего привода. |
||
|
|
Описание лабораторного стенда |
Синхронно следящий привод малой мощности с электронным усилителем смонтирован на лабораторном стенде. Электрическая схема стенда представлена на рис. 5.2. В его схему входят: сельсиндатчик СД со шкалой, сельсин-приемник (сельсин-трансформатор)
СТ, электронный фазочувствительный усилитесь, |
исполнительный |
|
двигатель М. Исполнительным двигателем является двухфазный |
||
асинхронный |
двигатель, который обычно |
применяется для |
40