

4. Расчет режимов торможения
4.1. Расчет сопротивлений резисторов торможения
Из всевозможных режимов торможения рекомендуется использовать режим торможения противовключением асинхронных двигателей.
При торможении асинхронных двигателей с фазным ротором в режиме противовключения критическое скольжение SКТрекомендуется принять равным 2. Тогда соответствующее этому режиму значение сопротивленияRТПдобавочного резистора торможения противовключением равно
![]() . (46)
. (46)
Для торможения следует использовать резисторы, предназначенные для пуска. Если их недостаточно, следует дополнить резисторами до получения значения RТП.
4.2. Построение механических характеристик двигателей в режимах торможения
При торможении противовключением асинхронного двигателя на обмотку статора подается система трехфазных напряжений с другим чередованием фаз, чем при работе в двигательном режиме. При этом ротор в течение всего времени торможения до останова вращается в направлении, противоположном направлению вращения магнитного поля. В связи с этим для расчета механической характеристики =f(M)следует использовать два следующих уравнения.
![]() ,
(47)
,
(47)
 .
(48)
.
(48)
При построении механической характеристики скольжение Sследует задавать в пределах от 0 до 1.
5. Схама управления
Разработку схемы управления пуском и торможением двигателя следует выполнить в соответствии с [1, с. 119-133, 260-268], материалами лекционного курса, соблюдая стандарты [2, c. 133-169, 252-286] на условные графические обозначения. В этих литературных источниках точного аналога разрабатываемого варианта может не быть. Поэтому при разработке схемы и ее описании потребуется некоторая самостоятельность, которая может быть приобретена только после тщательного изучения разделов указанной литературы.
6. Расчет прерходных режимов
Целью расчета переходного режима при пуске и торможении является получение необходимых данных для настройки рале времени в схемах автоматического управления пуском и торможением двигателей, а также при выборе пусковых и тормозных резисторов и их проверке по тепловому режиму. Расчет переходного процесса рекомендуется проводить упрощенным методом, при котором не учитывается электромагнитная постоянная времени. Допущение о малости этой постоянной времени в резисторных электроприводах вполне оправдано, поскольку в цепь обмотки якоря практически в течении всего времени разгона и торможения включаются добавочные резисторы.
При линейной зависимости динамического момента (М-МС) от частоты вращения вращающий моментМи частота вращениядвигателя в переходном режиме изменяются по экспоненциальному закону
![]() ,
(49)
,
(49)
![]() ,
(50)
,
(50)
где постоянная времени ТМв общем случае определяется по формуле
![]() .
(51)
.
(51)
В формулах (49) - (51):
на--начальная частота вращения;
ус- установившаяся частота вращения;
t - текущее время;
- приращение частоты вращения при переходном процессе;
M- приращение вращающего момента двигателя, соответствующее приращению
J- суммарный приведенный момент инерции.
6.1. Расчет переходного процесса в электроприводах с асинхронными двигателями
При расчетах переходных процессов в электроприводах с асинхронными двигателями рекомендуется использовать линейную аппроксимацию нелинейных механических характеристик. На рис. 4 показана наиболее оптимальная аппроксимация механических характеристик. Аппроксимирующие прямые проходят через точки аивна механических характеристиках. Точкиврасполагаются на пересечении механических характеристик с вертикальной линией, проходящей через точкуМ1 на оси абсцисс, точкаа- на пересечении искусственных механических характеристик с вертикальной линией, проходящей через точку, соответствующую моменту переключенияМ2. Но точкаа, лежащая на естественной характеристике, в отличие от других соответствует установившемуся режиму.
Начальные и установившиеся значения вращающего момента двигателя на всех ступенях пуска одинаковы и равны: МНА=М1,МУС=МС. Но значенияна, ус,Тмна различных ступенях пуска различны. Они могут быть определены с помощью уравнения механической характеристики (41) и из пусковой диаграммы (рис. 4). Указанные
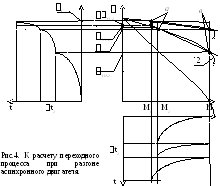
величины необходимо определить графически. На рис.4 представлена пусковая диаграмма для случая двухступенчатого пуска. ниже и слева от пусковой диаграммы показаны кривые изменения вращающего момента и частоты вращения во времени. Сплошными линиями выделены кривые при разгоне на второй ступени. Применительно к этой ступени показана методика определения необходимых величин. На рис.4 обозначено:
на2 - начальная частота вращения на второй ступени;
ус2- установившаяся частота вращения на второй ступени;
2- частота вращения в момент переключения на следующую ступень;
Mc- вращающий момент сопротивления на валу двигателя;
t2- время разгона на второй ступени.
M2- приращение вращающего момента двигателя, соответствующее приращению
где - приращение частоты вращения при переходном процессе в соответствии с электромеханической характеристикой 2 (см. рис.4);
Постоянная времени Тм2второй ступени определяется следующим образом.
![]() ,
(52)
,
(52)
Постоянную времени следует определить графически. Например, при определении постоянной времени второй ступени можно принять
![]() ,
(53)
,
(53)
![]()
(54)
(54)
При построении графических зависимостей = f(t)иM = f(t)необходимо воспользоваться уравнениями (49) и (50) и достаточно рассчитать значения координат трех точек для каждого участка.
При выключении система автоматического управления должна обеспечить автоматическое торможение электродвигателя до полного останова. Переходный процесс при этом протекает в соответствии с механической характеристикой противовключения (рис. 5).
При расчете переходного процесса тормозного режима асинхронного двигателя необходимо криволинейную механическую характеристику аппроксимировать прямой линией ав. На рис. 4 показана такая аппроксимация и кривые переходного процесса. Зависимости=f(t)иM=f(t), рассчитываются по формулам (49) и (50), с учетом того, чтоМУСТ =МС.МНАТследует определять графически как точку пересечения механической характеристики тормозного режима с
горизонтальной линией, проходящей через точку Cна оси абсцисс (см. рис. 4 и 5).
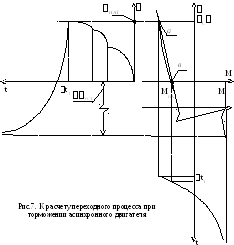
Установившееся значение расчетной частоты вращения УСТ переходного процесса при торможении графически определить затруднительно. Ее необходимо определять как точку пересечения аппроксимирующей прямой с вертикальной линией, соответствующей моменту сопротивленияМСпо формуле
![]() .
(55)
.
(55)
Следует иметь в виду, что числовые значения МНАТив, подставляемые в (55), отрицательны.
Начальное значения частоты вращения НАТпри торможении как это следует из рис. 5 равняетсяC, частоте вращения после завершения разгона (см. рис. 4).
Постоянная времени переходного процесса может быть определена так же как и при разгоне графически.