

Министерство образования и науки
Саратовский государственный технический университет им. Ю.А. Гагарина
Курсовая работа по дисциплине:
«Основы теории управления»
Вариант №12
Выполнил: студент гр. ПВС-31
Турлычкин Д.В.
Проверил: Сайкин А.И.
Саратов 2011
ВВЕДЕНИЕ
Система автоматического регулирования напряжения генератора
постоянного тока состоит из электронного усилителя ЭУ, двигателя
постоянного тока с независимым возбуждением Д, являющегося испол-
нительным элементом, генератора Г, являющегося объектом регули-
рования и делителя напряжения ДН, в котором сравнивается напряже-
ние генератора Uг с заданным значением Uo.

Рис.1. Блок схема САР напряжения генератора
постоянного тока.
Для каждого звена САР можно вывести дифференциальные уравне-
ния и построить структурную схему, которая будет иметь следующий
вид.
Рис.2. Передаточная функция САР генератора постоянного тока.
Где: W1=К2д(ТяР+1)
W2=1/(ТяТэмР**2+Тэм+1)
W3=К2г
W4=Ку
W5=К1д/(ТяТэмР**2+ТэмР+1)
W6=1/p
W7=К1г/(ТвР+1)
W8=Кд.
Таблица 1: Исходные данные по варианту №5
|
Тя |
Тэм |
Тв |
К1г |
К2г |
К1д |
К2д |
Ку |
Кд |
|
0.02 |
0.01 |
0.009 |
1.0 |
0.6 |
1.1 |
1.1 |
30 |
0.6 |
Тя - электрическая постоянная цепи времени якоря генератора;
Тэм - электромеханическая постоянная двигателя;
Тв - постоянная времени обмотки возбуждения генератора;
К1г - коэффициент усиления по управляещему воздействию генератора;
К2г - коэффициент усиления по возмущению генератора;
К1д - коэффициент усиления двигателя по управляющему воздействию;
К2д - коэффициент усиления двигателя по возмущению;
Ку - коэффициент усиления усилителя;
Кд - коэффициент усиления делителя.
Используя правило нахождения передаточной функции одноконтур-
ных структурных схем, определим её передаточные функции.
Передаточная функция разомкнутой системы:
Wp=K/((ТяТэмS**2+ТэмS+1)(ТвS+1))
где: К=Ку*К1д*К1г*Кд - передаточный коэффициент разомкнутой системы.
Передаточные функции прямой цепи:
по задающему воздействию Uo - Wпu:
Wпu=Wp/Kд;
по моменту сопротивления Мс - Wпм:
Wпм=К2д*К1г*(Тя+1)/(Тя*ТэмS**2+ТэмS+1)(ТвS+1)S;
по возмущению F - Wпf:
Wпf=К2г.
Для передаточных функций замкнутой системы (относительно выхода Uг) имеем:
по задающему воздействию Uo:
Wuu=Wпu/(1+Wp)=Ku/(Ao*S**4+A1*S**3+A2*S**2+A3*S+A4),
где: Ku=K/Kд;
Ao=Тя*Тэм*Тв;
А1=(Тя+Тв)*Тэм;
A2=Тэм+Тв;
А3=1;
А4=К;
по моменту сопротивления Мс:
Wuм=Wпм/(1+Wp)=-(BoS+B1)/(Ao*S**4+A1*S**3+A2*S**2+A3*S+A4),
где: Bo=К2д*К1г*Тя;
В1=К2д*К1г;
по возмущению F:
Wuf=Wпf/(1+Wp)=К2г(Ao*S**4+A1*S**3+A2*S**2+A3*s)/
/(Ao*S**4+A1*S**3+A2*S**2+A3*S+A4).
Уравнение САР в символической форме имеет вид:
Uг=Wuu*Uo+Wuм*Mc+Wuf*F
Выполнение работы:
Данная схема является линейной одноконтурной и имеет три входа: Mc, Uo и F, поэтому к ней можно применить принцип суперпозиции. Мы будем полагать сначала, что воздействие будет идти только по входу Mc, затем – только по входу Uo, потом – только по входу F. В итоге получим три системы:
По моменту сопротивления Mc:
передаточная функция имеет вид:
![]()
Выделим следующие элементарные звенья:
|
Звено |
Описание |
|
|
Интегрирующее звено наклон графика ЛЧХ -20 дб/дек 20 lg (K) = 20 lg (0.66) = -18 |
|
|
Форсирующее звено 1-го порядка наклон графика ЛЧХ +20 дб/дек ω1=1/Tя=50 |
|
|
Колебательное звено 2-го порядка наклон графика ЛЧХ -40 дб/дек коэффициент демпфирования d=0.3546; постоянная времени Т=0.0141 ω2 = 70.92 |
|
|
Апериодическое звено 1-го порядка наклон графика ЛЧХ -20 дб/дек ω3=111,111 |
По задающему воздействию Uo :
передаточная функция имеет вид:
![]()
Где K=19.8
В этой функции можно выделить следующие элементарные звенья:
|
Звено |
Описание |
|
|
Колебательное звено 2-го порядка; Наклон графика ЛЧХ -40 дБ/дек; K=33 ω1=70.92 20 lg (K) = 20 lg (0.66) = 29,5 |
|
|
Апериодическое звено 1-го порядка; Наклон графика ЛЧХ -20 дБ/дек; ω2=111,111; |
По возмущению f:
Передаточная функция имеет вид:
![]() ;
;
|
|
Пропорциональное звено; 20 lg(0.6) =-4.44; |
Построение лачх сар
(асимптотической, желаемой, корректирующего устройства).
В данной САР имеется три входа: по задающему воздействию, по моменту сопротивления, по возмущению. В соответствии с принципом суперпозиции возможно исследование поведения системы по каждому входу отдельно, поэтому построим ЛАЧХ для каждого входа отдельно.
Асимптотическая ЛАЧХ разомкнутой системы строится из ЛАЧХ элементарных звеньев путём их графического сложения. (Располагаем все частоты в порядке возрастания и начинаем рассматривать все звенья с наименьшей частоты. Если соответствующая передаточная функция находится в числителе, то для звена 1-го порядка – наклон +20 дб/дек, для звена 2-го порядка - +40дб/дек. Если звено в знаменателе, то соответственно –20 и –40 дб/дек).
Для построения желаемой ЛАЧХ необходимы следующие величины (находятся по номограммам Солодовникова исходя из заданных свойств системы: перерегулирование не более 20% и время регулирования 0,2 с):
-
Максимальное значение вещественной части частотной характеристики Pmax=1,05;
-
Частота среза определится по формуле:
![]()
![]()
-
Максимальное отклонение логарифмической характеристики Lm = 28;
Номограммы Солодовникова
-
Запас по фазе =60.
Р
28 -40
-20
-18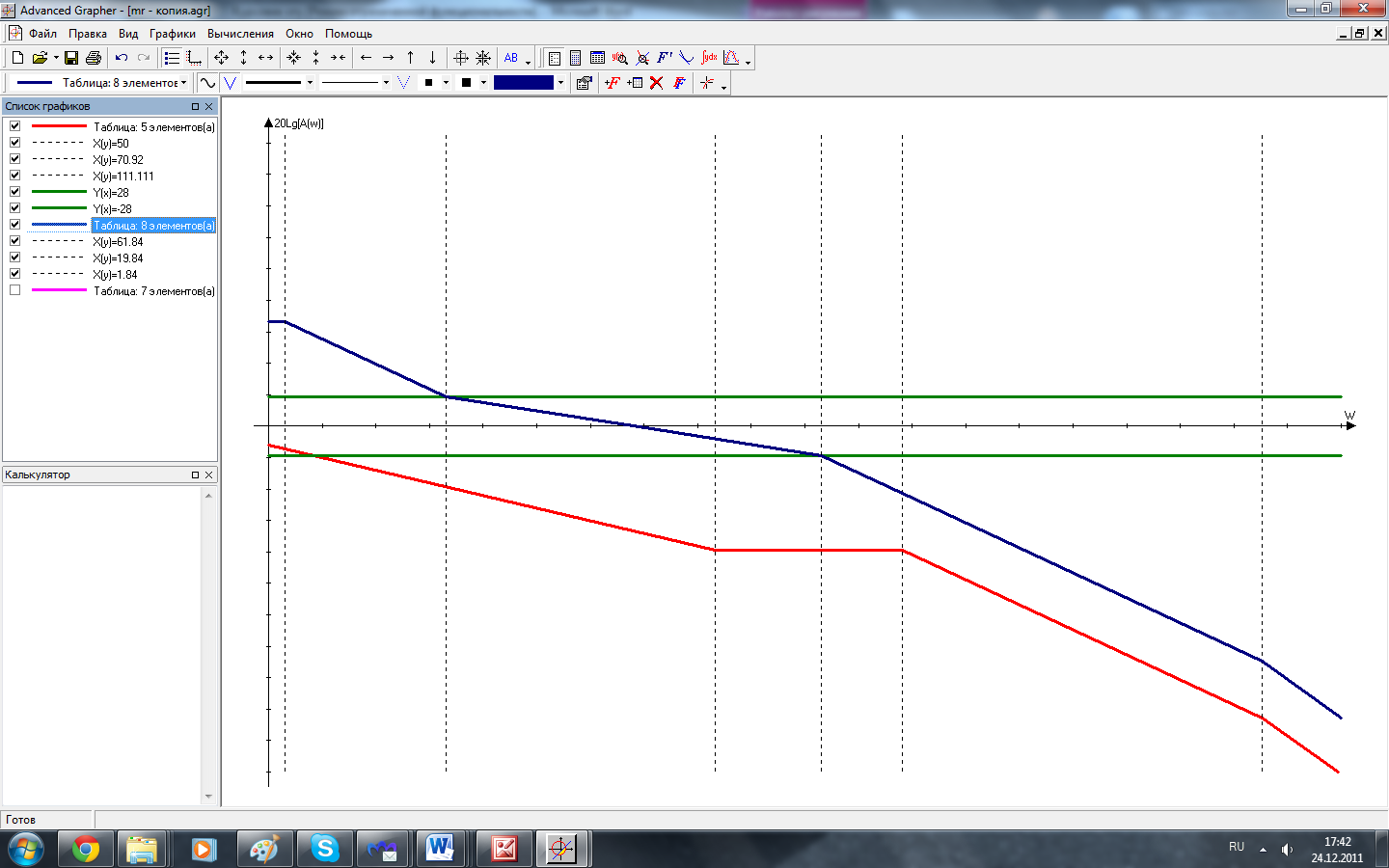
-40 -40
-20
-60
ЖЛАЧХ
ЛАЧХ -40 -40
-60
-60
ЖЛАЧХ
ЛАЧХ
-28
Рис.1. ЛАЧХ и Желаемая ЛАЧХ при воздействии по входу Mc
-20
-20
-40
28
-28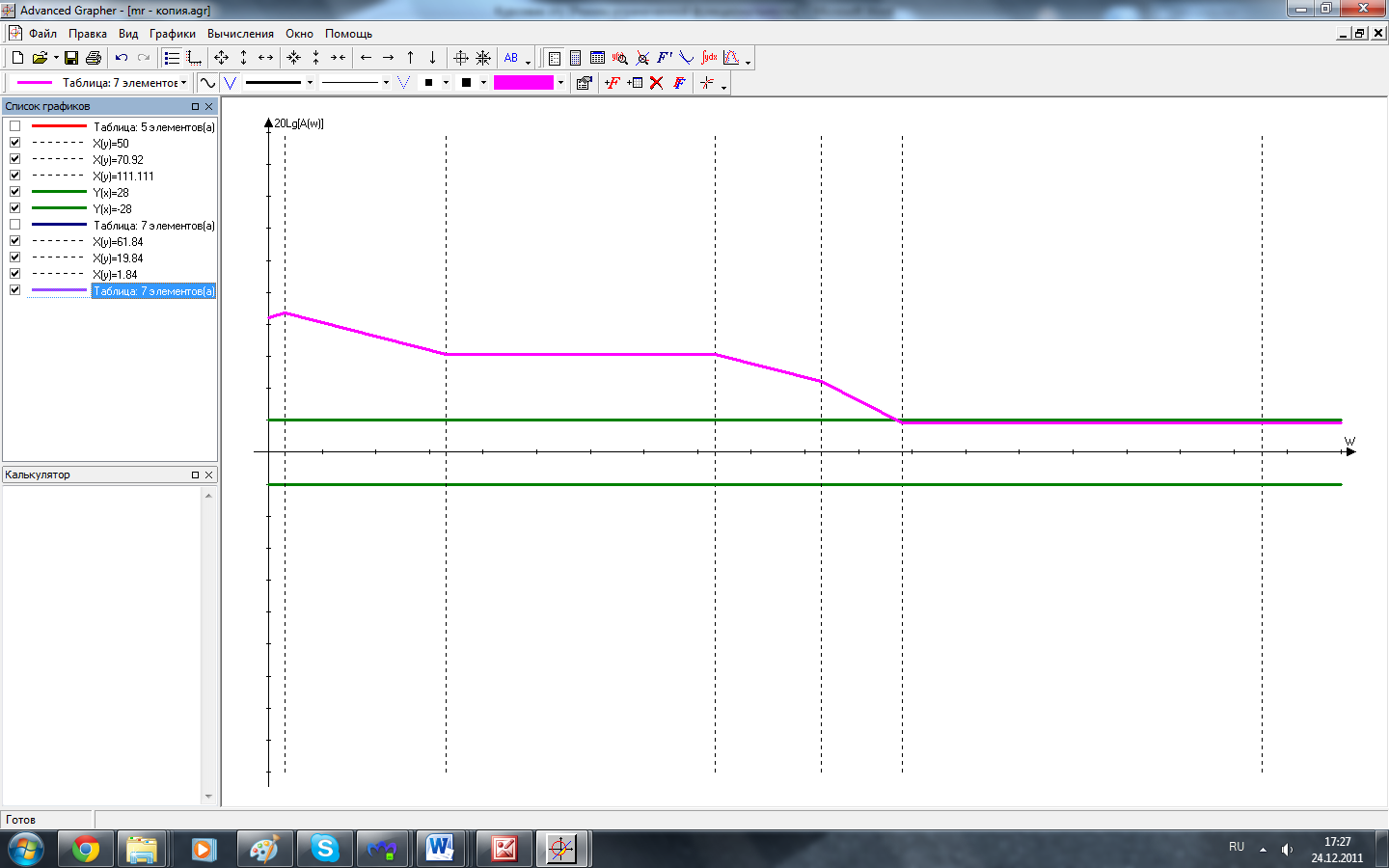
С помощью ЛАЧХ корректирующего устройства найдем его передаточную функцию:

-40
-40 -40 -40
-20
-20
ЛАЧХ
ЖЛАЧХ
28
-28
29,5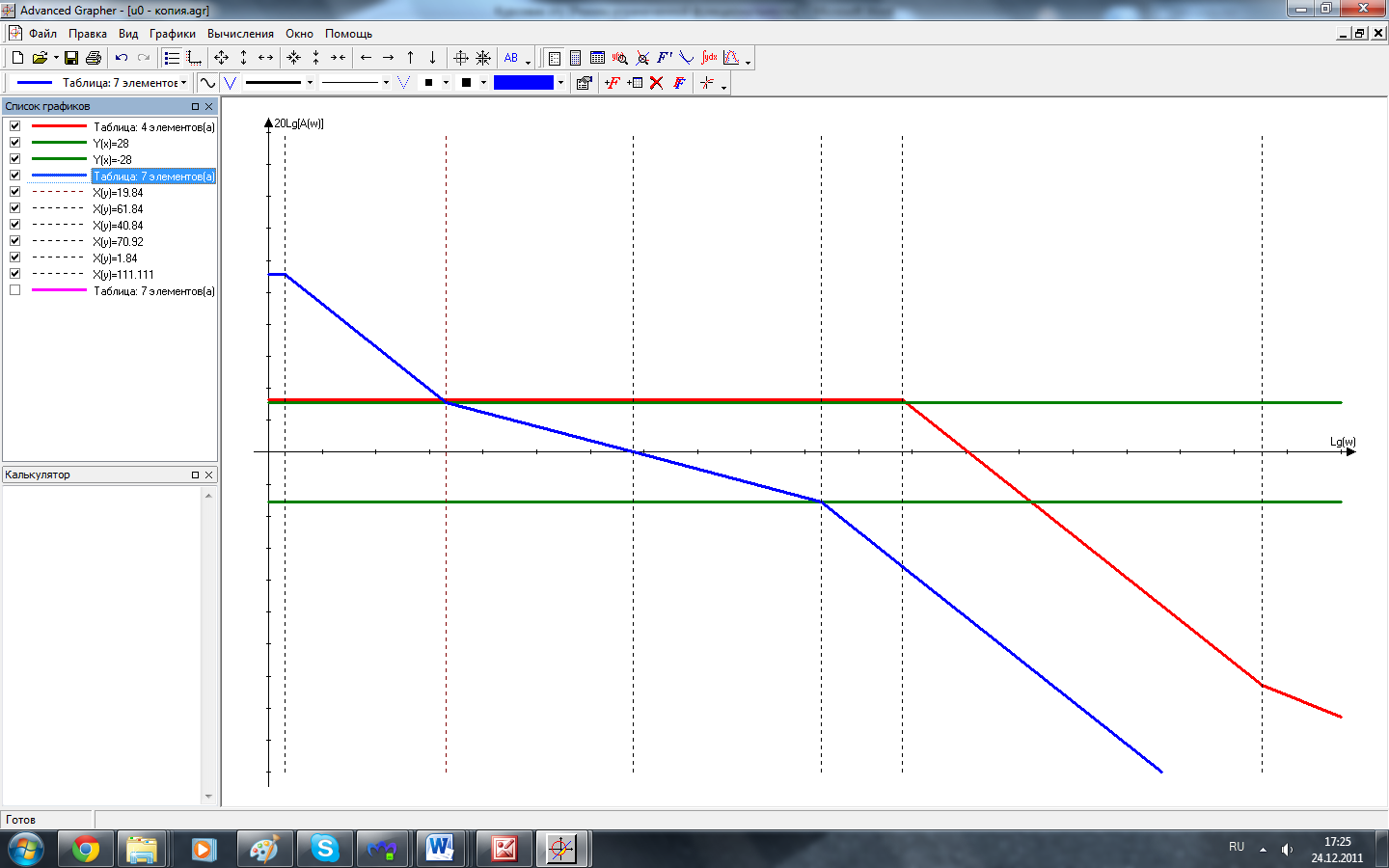

Р
-40
-20
28
Р
-40
-28
С помощью ЛАЧХ корректирующего устройства
найдем его передаточную функцию:
помощью ЛАЧХ корректирующего устройства
найдем его передаточную функцию:

При воздействии по входу F система будет состоять лишь из одного пропорционального звена, поэтому ей не требуется никакого корректирующего устройства.
Осуществим выбор корректирующего устройства на основании графиков ЛАЧХ корректирующих устройств по входу Мс.
-
Реально дифференцирующая цепочка


Реально дифференцирующая цепь(+20дБ/дек) описывается функцией:
![]()
Где:
T=RC
Рассчитаем номиналы элементов для корректирующего устройства по входу Mc:
Пусть
![]() ,
тогда:
,
тогда:
![]() ;
;
-
Реально интегрирующая звено


Реально интегрирующая цепь(-20дБ/дек) описывается функцией:
![]() ;
;
Где:
T1=(R1+R2)C, T2=R2C
Рассчитаем номиналы элементов для корректирующего устройства по входу U0:
Пусть
![]() ,
тогда:
,
тогда:
![]() ;
R1=T1/C2-R2=
;
R1=T1/C2-R2=![]()
-
Реально интегрирующая звено


Реально интегрирующая цепь(-20дБ/дек) описывается функцией:
![]() ;
;
Где:
T1=(R1+R2)C, T2=R2C
Рассчитаем номиналы элементов для корректирующего устройства по входу U0:
Пусть
![]() ,
тогда:
,
тогда:
![]() ;
R1=T1/C2-R2=
;
R1=T1/C2-R2=![]()
-
Реально интегрирующая звено(Два)


Реально интегрирующая цепь(-20дБ/дек) описывается функцией:
![]() ;
;
Где:
T1=(R1+R2)C, T2=R2C
Рассчитаем номиналы элементов для корректирующего устройства по входу U0:
Пусть
![]() ,
тогда:
,
тогда:
![]() ;
R1=T1/C2-R2=
;
R1=T1/C2-R2=![]()
Осуществим выбор корректирующего устройства на основании графиков ЛАЧХ корректирующих устройств по входу U0.
-
Реально интегрирующая звено(Два)


Реально интегрирующая цепь(-20дБ/дек) описывается функцией:
![]() ;
;
Где:
T1=(R1+R2)C, T2=R2C
Рассчитаем номиналы элементов для корректирующего устройства по входу U0:
Пусть
![]() ,
тогда:
,
тогда:
![]() ;
R1=T1/C2-R2=
;
R1=T1/C2-R2=![]()
-
Реально интегрирующая звено


Реально интегрирующая цепь(-20дБ/дек) описывается функцией:
![]() ;
;
Где:
T1=(R1+R2)C, T2=R2C
Рассчитаем номиналы элементов для корректирующего устройства по входу U0:
Пусть
![]() ,
тогда:
,
тогда:
![]() ;
R1=T1/C2-R2=
;
R1=T1/C2-R2=![]()
-
Реально интегрирующая звено(Два)


Реально интегрирующая цепь(-20дБ/дек) описывается функцией:
![]() ;
;
Где:
T1=(R1+R2)C, T2=R2C
Рассчитаем номиналы элементов для корректирующего устройства по входу U0:
Пусть
![]() ,
тогда:
,
тогда:
![]() ;
R1=T1/C2-R2=
;
R1=T1/C2-R2=![]()
В качестве корректирующего устройства по входу Мс используем пассивные интегрирующую и дифференцирующую цепочки:
-
Дифференцирующая цепочка
-
Реально интегрирующая звено
-
Реально интегрирующая звено
-
Реально интегрирующая звено(Два)
В качестве корректирующего устройства по входу U0 используем пассивные интегрирующую и дифференцирующую цепочки:
-
Реально интегрирующая звено (Два)
-
Реально интегрирующая звено
-
Реально интегрирующая звено(Два)
Расчеты сопротивлений для этих четырехполюсников уже были сделаны ранее