

Курсовые / Курсовая
.docФедеральное агентство по образованию ГОУ ВПО
Саратовский государственный технический университет
Кафедра программного обеспечения вычислительной техники и автоматизированных систем
Курсовая работа по дисциплине:
«Основы теории управления»
СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
НАПРЯЖЕНИЯ ГЕНЕРАТОРА ПОСТОЯННОГО ТОКА
Вариант №13
Саратов 2012
Введение: Система автоматического регулирования напряжения генератора постоянного тока состоит из электронного усилителя ЭУ, двигателя постоянного тока с независимым возбуждением Д, являющегося исполнительным элементом, генератора Г, являющегося объектом регулирования и делителя напряжения ДН, в котором сравнивается напряжение генератора Uг с заданным значением Uo.

Рис.1. Блок схема САР напряжения генератора постоянного тока
Для каждого звена САР можно вывести дифференциальные уравнения и построить структурную схему, которая будет иметь следующий вид.
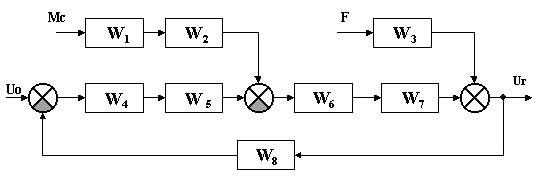
Рис.2. Передаточная функция САР генератора постоянного тока
Задание: Вариант №29
|
Параметр |
Значение |
Описание |
|
Тя |
0,04 |
электрическая постоянная цепи времени якоря генератора |
|
Тэм |
0,03 |
электромеханическая постоянная двигателя |
|
Тв |
0,02 |
постоянная времени обмотки возбуждения генератора |
|
К1г |
0,9 |
коэффициент усиления по управляющему воздействию генератора |
|
К2г |
1 |
коэффициент усиления по возмущению генератора |
|
К1д |
0,9 |
коэффициент усиления двигателя по управляющему воздействию |
|
К2д |
1,3 |
коэффициент усиления двигателя по возмущению |
|
Ку |
23 |
коэффициент усиления усилителя |
|
Кд |
1 |
коэффициент усиления делителя |
Выполнение работы
Данная схема является линейной одноконтурной и имеет три входа: Mc, Uo и F, поэтому к ней можно применить принцип суперпозиции. Мы будем полагать сначала, что воздействие будет идти только по входу Mc, затем – только по входу Uo, потом – только по входу F. В итоге получим три системы:
-
По моменту сопротивления Mc
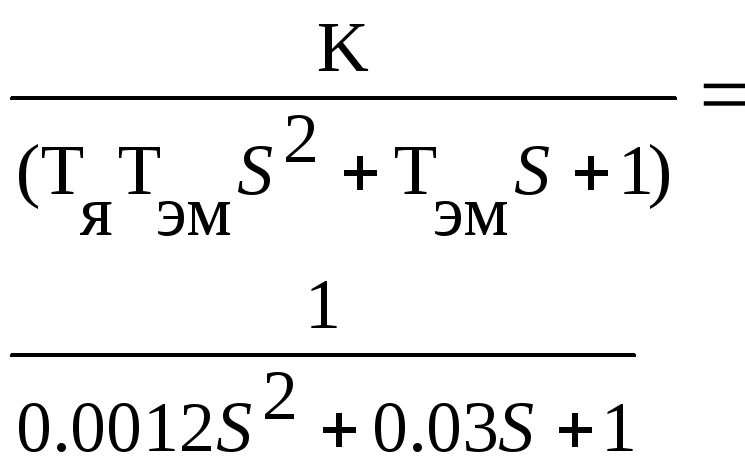
Передаточная функция имеет вид:
![]()
Можно выделить элементарные звенья, тогда получим:
|
Звено |
Описание |
Вид |
|
|
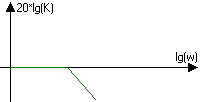
Интегрирующее звено наклон графика ЛЧХ -20 дб/дек 20lg(K)=20lg(1,17) =1.36 |
|
|
|
Форсирующее звено 1-го порядка наклон графика ЛЧХ +20 дб/дек ω=1/Tя=25, K=1, 20lg(K) =0 |
|
|
|
Колебательное звено 2-го порядка наклон графика ЛЧХ -40 дб/дек коэффициент демпфирования d=0.5, постоянная времени Т=0.03,ω = 33.3, K=1, 20lg(K) =0 |
|
|
|
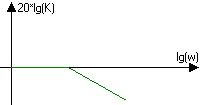
Апериодическое звено 1-го порядка наклон графика ЛЧХ -20 дб/дек ω=50, Т=0.02, K=1, 20lg(K) =0 |
|



-
По задающему воздействию Uo
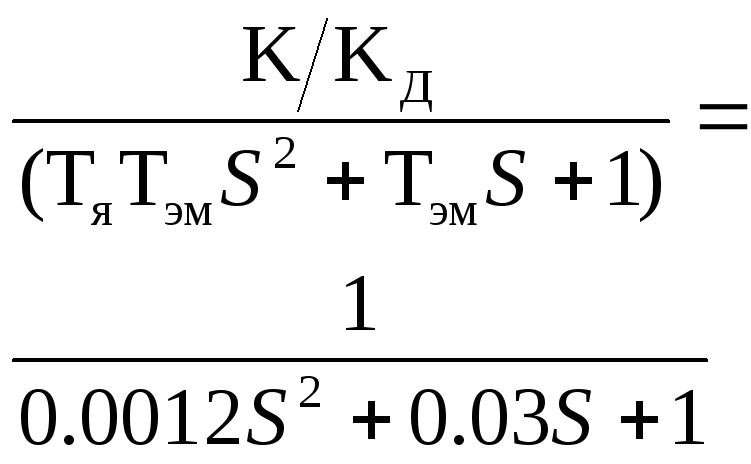
Передаточная функция имеет вид:
![]()
Можно выделить элементарные звенья, тогда получим:
|
Звено |
Описание |
Вид |
|
|
Колебательное звено 2-го порядка наклон графика ЛЧХ -40 дб/дек коэффициент демпфирования d=0.5, постоянная времени Т=0.03, ω=33,3, K=1, 20lg(K)=0 |
|
|
|
Апериодическое звено 1-го порядка наклон графика ЛЧХ -20 дб/дек постоянная времени Т=0.02, ω=50, K=1, 20lg(K)=0 |
|
-
По возмущению F
Передаточная функция имеет вид:
![]()
Можно выделить элементарные звенья, тогда получим:
|
Звено |
Описание |
Вид |
|
|
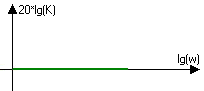
пропорциональное звено 20 lg (1) = 0 |
|
Построение асимптотической ЛАЧХ, желаемой ЛАЧХ и ЛАЧХ корректирующего устройства. Выбор его типа.
При выборе корректирующего устройства необходимо обеспечить следующие динамические свойства:
-
величина перерегулирования 20 %;
-
время регулирования t 0.2 сек.
Воспользуемся номограммами Солодовникова для определения следующих величин:
-
Максимальное значение вещественной части частотной характеристики Pmax=1,05;
-
Частота среза определится по формуле:
![]()
![]()
-
Максимальное отклонение логарифмической характеристики Lm = 30;
-
Запас по фазе =60.
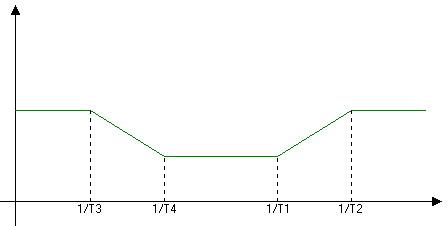
Асимтотическая ЛАЧХ, ЖЛАЧХ, ЛАЧХ корректирующего устройства по входу Mc:

Проверить правильность построения графика ЛАЧХ корректирующего устройства можно, сложив его с графиком ЛАЧХ неизменяемой части системы. Если в итоге получится график желаемой ЛАЧХ, значит, график ЛАЧХ корректирующего устройства был построен верно.
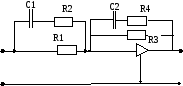
В качестве корректирующего устройства применим интегро-дифференциальный усилитель:
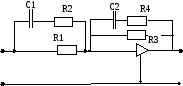

Передаточная функция:
![]()
Для расчета воспользуемся формулами:
K=R3/R1
T1=(R1+R2)C1
T2=R2C1
T3=(R3+R4)C2
T4=R4C2
где
T1=0.025, T2=0.0012, T3=1, T4=0.5
Т.к был добавлен коэффициент усиления равный 140, то K=140, так же положим C1=100мкФ и получим следующие параметры:
R1=238 Ом
R2=12 Ом
R3=33.32 KОм
R4=33.33 KОм
L1= 42.92 L2=63.28
C1=100*10-6 Ф, C2=15*10-6 Ф
![]()
Асимтотическая ЛАЧХ, ЖЛАЧХ, ЛАЧХ корректирующего устройства по входу U0:

В качестве корректирующего устройства применим интегро-дифференциальный усилитель:
Передаточная функция:
![]()
Для расчета воспользуемся формулами:
K=R3/R1
T1=(R1+R2)C1
T2=R2C1
T3=(R3+R4)C2
T4=R4C2
где
T1=0.03, T2=0.0012, T3=1, T4=0.03
Т.к был добавлен коэффициент усиления равный 140.25, то K=140.25, так же положим C1=100мкФ и получим следующие параметры:
R1=288 Ом
R2=12 Ом
R3=40.392 KОм
R4=12.5 KОм
L1= 42.93 L2=105.25
C1=100*10-6 Ф, C2=24*10-6 Ф
![]()
При воздействии по входу F система будет состоять лишь из одного пропорционального звена, поэтому ей не требуется никакого корректирующего устройства.
Определение порядка астатизма САР и её добротности.
Порядок астатизма САР фактически равен числу интегрирующих звеньев:
1.
 порядок астатизма
равен 0.
порядок астатизма
равен 0.
2.

порядок астатизма равен 1.
порядок астатизма равен 1.
3.
![]() порядок астатизма
равен 0.
порядок астатизма
равен 0.
Общий порядок астатизма системы равен 1, т.е. в ней нет статической ошибки.
Под добротностью САР понимается произведение всех её коэффициентов усиления, которое в нашем случае равно:
К=Ку*К1г*К2г*К1д*К2д*Кд = 24.22
Построение переходной функции САР при единичном ступенчатом воздействии. Оценка качества переходного процесса.
Уравнение САР в символической форме имеет вид:
![]()
Подключив последовательно корректирующее устройство, получим следующее:
![]()
С помощью системы SIAM построим графики переходных процессов системы с корректирующими устройствами.
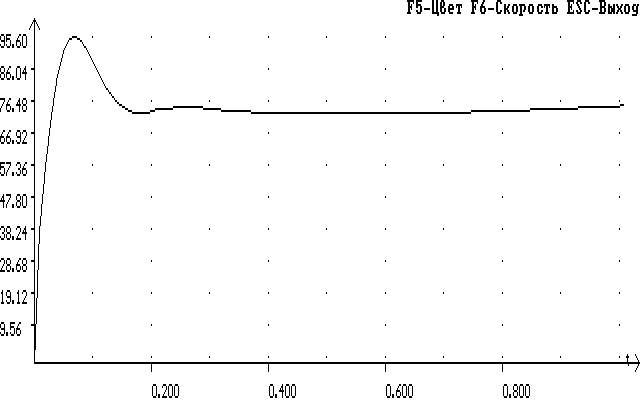
Для![]()
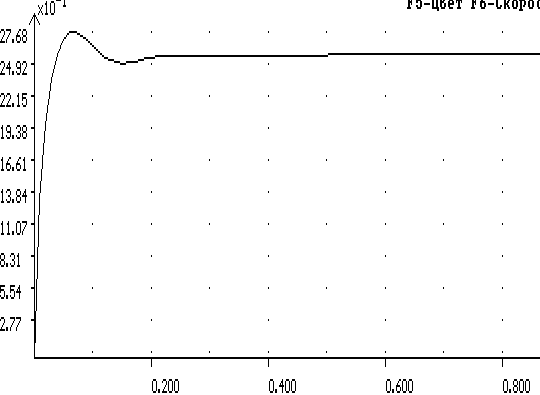
Из данного графика переходной функции видно, что при ступенчатом воздействии на замкнутую систему по входу Uo заданные динамические свойства обеспечены, а именно: время регулирования составляет не более 0.2 сек.; величина перерегулирования – не более 20 %.
Для
![]()
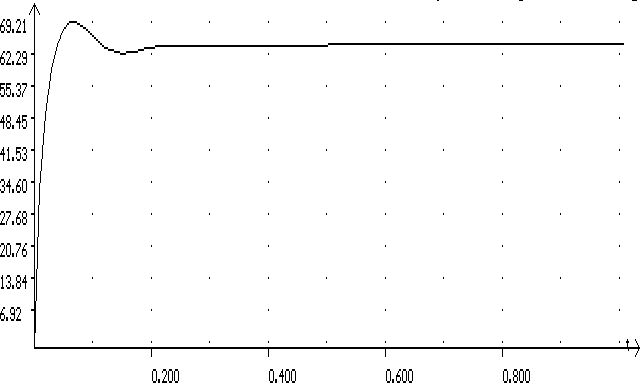
Из данного графика переходной функции видно, что при единичном воздействии на замкнутую систему по входу Мс заданные динамические свойства обеспечены, а именно:
время регулирования составляет не более 0.2 сек.; величина перерегулирования – не более 20%.
![]()
Из данного графика переходной функции видно, что при единичном воздействии на замкнутую систему заданные динамические свойства обеспечены, а именно: время регулирования составляет не более 0.2 сек.; величина перерегулирования – не более 20%
Исследование полученной динамической системы по критерию Найквиста
Критерий Найквиста, основанный на использовании частотных характеристик, позволяет судить об устойчивости замкнутой системы по ее амплитудно-фазовой характеристике в разомкнутом состоянии.
Согласно критерию Найквиста для того чтобы система была устойчивой необходимо чтобы годограф АФЧХ для функции (S)=1+R(S)/Q(S) не охватывал точки (-1,0) при изменение частоты от 0 до .
По задающему воздействию Uo - Wпu:

Согласно критерию Найквиста система является устойчивой, запас по амплитуде h=1.9, запас по фазе =400.
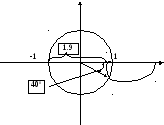
По моменту сопротивления Мс - Wпм:
Данная передаточная функция содержит интегрирующее звено и следовательно обладает астатизмом порядка 1. В этом случае годограф АФЧХ получается разомкнутым и уходит в бесконечность, в этом случае годограф необходимо достроить с помощью дуги радиуса R.

-1 1
1.91







Согласно критерию Найквиста система является устойчивой, запас по амплитуде h=1.91, запас по фазе =500.