

Maloletov-diss
.pdf21
Преимущества шагающей техники перед колёсной проявляются в классах 3 и 4 (рисунок 1.1).
Шагающие машины с движителями циклового действия
характеризуются тем, что опорные точки механизмов шагания движутся по одним и тем же траекториям относительно корпуса машины, и не решают задач адаптации к грунту и выбора точек постановки ног на грунт. Такие машины имеют лучшую по сравнению с колёсными грунтовую проходимость за счёт меньшего сопротивления движению со стороны грунта, лучшего сцепления с опорной поверхностью, больших возможностей по снижению давления на грунт. Примеры машин с цикловыми движителями: стопоходящая машина П. Л. Чебышева (рисунок 1.9) [180, 452], шагающие опоры для дождевальной машины «Кубань» (рисунок 1.10) [205, 207, 208], транспортно-технологическая шагающая машина «Восьминог» (рисунок В.1) [206], шагающий болотоход (рисунок 1.11) [286, 287, 450]. Основным достоинством машин с цикловыми шагающими движителями по сравнению с другими шагающими машинами является простота их конструкции и управления.
Рисунок 1.9 — Стопоходящая машина П. Л. Чебышева (1878 г.)

22
Рисунок 1.10 — Шагающая опора для дождевальной машины «Кубань» (1995 г.)
Рисунок 1.11 — Шагающий болотоход БШМ-1 (2012 г.)
Наиболее же полно достоинства шагающих машин раскрываются в аппаратах с движителями, обеспечивающими произвольное движение опорной точки и, следовательно, произвольную следовую дорожку, а также адаптацию стопы к грунту, произвольный закон изменения скорости стопы как на этапе взаимодействия с грунтом, так и на этапе переноса. Такие машины значительно превосходят традиционные транспортные средства не только в грунтовой, но и в
23
профильной проходимости. А их основным недостатком является сложность конструкции и системы управления. Это наиболее многочисленный и разнообразный класс шагающих машин, и большинство последующих примеров за исключением особо оговоренных случаев относится к нему.
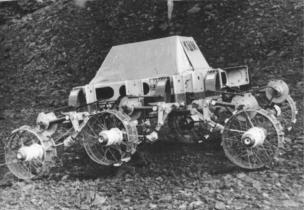
Колёсно-шагающими машинами традиционно называют класс аппаратов, в которых стопами шагающих движителей служат колёса. Такие машины могут работать в двух режимах: в режиме колёсной машины и в шагающем режиме. В первом случае шагающие движители блокируются, и машина движется только с использованием колёс. Во втором случае машина осуществляет шагание, отрывая поочерёдно колёса от грунта и переставляя их на новое место. При этом колёса, находящиеся в контакте с грунтом, могут как блокироваться, так и вращаться согласованно с движением опорных ног. Примерами таких машин являются (рисунки 1.12-1.15): колесно-шагающий аппарат разработки ВНИИТМ (Ленинград, СССР, под руководством д.т.н. М.И.Маленкова) [449], робот ATHLETE (США), колёсно-шагающий экскаватор Kaiser (Германия), колёсношагающий аппарат ALDURO (Германия) [350, 386] и ряд других разработок, преимущественно в коммерческих фирмах [204].
Рисунок 1.12 — Колёсно-шагающий аппарат ВНИИТМ (СССР), разрабатывавшийся для исследования других планет

24
Рисунок 1.13 — Колёсно-шагающая машина ATHLETE (США)
Рисунок 1.14 — Колёсно-шагающий экскаватор Kaiser (Германия)
Рисунок 1.15 — Колёсно-шагающий робот ALDURO (Германия)
Некоторые примеры прыгающих и бегающих машин [202, 302, 303, 376, 400, 446] представлены на рисунках 1.16-1.19. Следует отметить, что машины способные реализовывать с помощью ног прыжки или бег, обычно способны и к ходьбе.

25
Рисунок 1.16 — Бегающий и прыгающий Tiger robot (Иран)
Рисунок 1.17 — Одноногий прыгающий Monopod Hopper (США)
Рисунок 1.18 — Прыгающий X-RHex (США)

26
Рисунок 1.19 — Big Dog (США).
К машинам ползующего типа согласно выше приведённому определению относятся большинство так называемых шагающих экскаваторов (рисунок 1.20). Не смотря на слово «шагающий» в названии, такие машины перемещаются, приподнимаясь с помощью ног, и лежат на днище во время перестановки ног в новое положение.
Рисунок 1.20 — Механизм шагания экскаватора ЭШ6/45
Лазающие машины представлены, например, роботами, показанными на рисунках 1.21-1.24 [89, 301, 304, 334, 378, 379, 401]. Не смотря на то, что

27
принципы управления ногами лазающих и шагающих машин во многом похожи, специфика взаимодействия с опорной поверхностью и области применения этих классов машин настолько сильно различаются, что сравнение их показателей (за исключением общетехнических) становится практически бессмысленным. Следует также отметить, что многие ползающие и лазающие роботы вообще не имеют ног или какого-то их подобия, перемещаясь например за счёт движений гибкого корпуса.
Рисунок 1.21 — Лазающий робот с электростатическим сцеплением (Италия)
Рисунок 1.22 — Лазающий робот с механическими захватами Gorilla III (Япония)
Рисунок 1.23 — Лазающий робот с магнитным сцеплением (США)

28
Рисунок 1.24 — Лазающий робот LitleApe с крюковыми захватами (Германия)
Таким образом из всего разнообразия аппаратов, передвигающихся с помощью ног, в качестве шагающих следует рассматривать только машины относящиеся к классам 3 и 4, а также, с некоторыми оговорками, к классам 2 и 5.
Области применения шагающих машин
Подавляющее большинство известных образцов шагающих машин — это лабораторные макеты, предназначенные для проведения исследований и отработки технологий. Несмотря на то, что ещё 30–35 лет назад ставилась задача разработки шагающих машин предназначенных для эксплуатации [6, 8, 101, 102, 103, 130, 159, 195, 201, 299, 312], количество действующих образцов шагающих машин, способных выполнять работы в реальных условиях эксплуатации, исчисляется единицами [202, 433].
Большинство разработок крупногабаритных шагающих машин, способных выполнять транспортно-технологические операции, замещая традиционные колёсные и гусеничные средства, — это дорогостоящие проекты. Высокая стоимость шагающих роботов является одним из основных сдерживающих факторов, препятствующих широкому использованию шагающих машин. Возможности снижения стоимости шагающих роботов рассмотрены в работе [314].
Достоинства шагающих машин проявляются в задачах транспортировки
29
грузов в условиях бездорожья [1, 101, 188, 198, 253, 269, 275, 276, 283, 284]. При движении в сложных условиях машины с шагающими движителями могут быть более эффективными в сравнении с традиционными транспортными средствами. Использование шагающего способа передвижения дает качественный рост ряда основных показателей транспортных машин по сравнению с колесными и гусеничными движителями [6, 70, 195, 201, 198, 213]. Имеют место принципиально более высокие возможности по адаптации к опорной поверхности и профильная проходимость [3, 6, 70, 213, 296], высокая маневренность, допускающая перемещение машины в произвольном направлении и повороты на месте [11, 293, 339], возможность работы на слабых грунтах [220, 261], возможность управления опорными реакциями и стабилизации положения корпуса при движении [77, 280, 294].
Высокая грунтовая проходимость и щадящее по сравнению с колесным и гусеничным транспортом воздействие на почву определяют целесообразность использования шагающих машин при движении по слабым грунтам и легко разрушаемому почвенному покрову в болотистой местности, тундре, пустынях и полупустынях, в лесу и в горах [62, 144, 187, 220].
Такие машины предполагается использовать, например, для ремонтных работ на участках нефте- и газопроводов, проложенных на труднопроходимой территории [56, 177, 178, 269]. Предполагается использование шагающих робототехнических комплексов для аварийно-спасательных работ в экстремальных условиях и ликвидации последствий природных и техногенных катастроф [56, 263]. Имеется опыт проведения с помощью шагающих машин ремонтно-восстановительных работ на очистных сооружениях промышленных предприятий [263]. Условия применения роботов при устранении последствий чрезвычайных ситуаций описаны в работе [12]. Там же сформулированы общие технические требования к роботам, работающим в экстремальных условиях и приведена классификация роботов по массово-геометрическим параметрам.
30
Важное значение имеет использование шагающих машин для проведения научных исследований в условиях, непроходимых для традиционных транспортных средств, например, для исследования кратеров вулканов [340], для проведения исследований на поверхности других планет [160, 210, 213, 373, 455].
Возможно применение шагающих аппаратов в военных целях [312, 322, 335], для транспортировки грузов, контроля последствий ядерного, химического и биологического нападения, разведки, постановки дымовой завесы, разборки разрушенных зданий и проведения спасательных операций в городах после ядерной бомбардировки или стихийных бедствий. Исследуются возможности применения шагающих движителей для боевых машин. Шагающие машины могут оказаться незаменимыми для устранения последствий военных действий, например, для поиска и разминирования мин [138, 292, 295, 347, 354, 386, 388, 425, 426].
Перспективно использование машин с шагающими движителями при внедрении новых почвосберегающих технологий в лесном и сельском хозяйстве [33, 34, 157, 219, 241, 256, 265, 457] благодаря дискретному взаимодействию стоп с грунтом, что значительно уменьшает разрушение экологически ранимого почвенного покрова. Особенно эффективны шагающие машины в поливном земледелии [32, 187, 225] за счёт их высокой грунтовой проходимости .
Существуют шагающие роботы, предназначенные для передвижения в ограниченном пространстве, например, внутри труб [24] и для вертикального перемещения [88].
Отдельное направление представляют шагающие роботы, предназначенные для домашнего сервиса, отдыха, медицины [9, 333, 416]. Их отличительной особенностью является адаптация к условиям, предназначенным для человека.
С точки зрения механики и управления движением области применения шагающих машин классифицируются по характеру и размеру преодолеваемых препятствий (рисунок 1.25). Можно выделить движение на местности без