

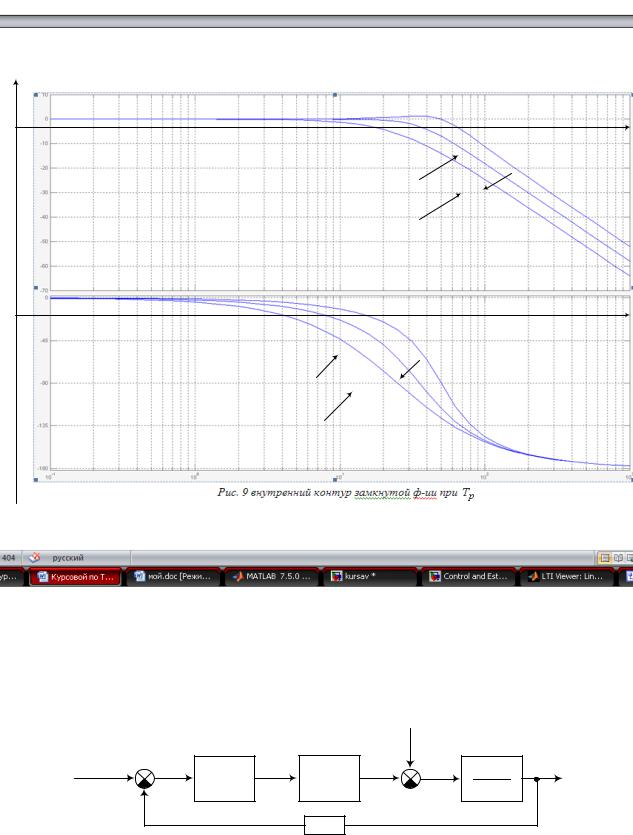
L(ω) = −20lg 
 (1 −T 2ω2 )2 + 4ξ2T 2ω2
(1 −T 2ω2 )2 + 4ξ2T 2ω2
ϕ(ω) = −arctg( 2ξω2T 2 ) 1−T ω
L(ω),ϕ(ω)
logω,ω
L1(ω)
L2 (ω)
L3 (ω)
ϕ1(ω)
ϕ2 (ω)
ϕ3 (ω)
logω,ω
Рис. 9 ЛАЧХ и ЛФЧХ внутреннего замкнутого контура САР при изменении параметра Тр регулятора
3. Расчёт и исследование двухконтурной статической САР с последовательной коррекцией
3.1. Расчёт регулятора внешнего контура САР. Составление
структурной схемы двухконтурной САР
Внешней замкнутый контур САР может быть представлен следующей структурной схемой (рис. 10)
+
F(р)
g = yз.2 |
+ |
Wрег.2(р) |
y1 |
1 |
y2 |
|
|
Wз.2(р) |
То2 |
р |
|
|
|
|
|
K2
Рис. 10 Структурная схема внешнего контура регулирования САР
Передаточная функция регулятора внешнего контура выглядит следующим образом
16
|
|
Wрег.2(р)= |
|
|
1 |
|
|
|
К1 |
= |
|
1 |
|
То2 |
р |
= |
То2 |
; |
(16) |
||
|
|
2i Т |
|
р |
W |
|
К2 |
4 |
Тµ р |
1 |
|
4 Тµ |
|||||||||
|
|
|
|
|
µ |
( р) |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
o2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где W |
( р) = |
1 |
|
− передаточная функция той части объекта регулирования, которая компенсируется |
|||||||||||||||||
|
|
||||||||||||||||||||
o2 |
|
То2 |
р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
регулятором контура
К1 = К2 =1 − коэффициенты обратных связей контуров (при единичной обратной связи)
Теперь подставляя параметры соответствующие варианту получаем следующий вид функции
Wрег.2(р)= |
То2 |
= |
0,22 |
= 2,75; |
|||
4 |
Тµ |
4 |
0,02 |
||||
|
|
|
|||||
Следовательно регулятор имеет пропорциональную характеристику (т.е. передаточная функция имеет вид пропорционального звена).
На двухконтурную САР оказывают влияние следующие виды внешних воздействий:
1)Задающее воздействие g = yз2;
2)Возмущающее воздействие F .
Поэтому при исследовании двухконтурной САР необходимо определить её реакцию на эти воздействия:
а) реакция САР на управляющее воздействие:
1)хвх = g = yз2(t), хвых = y1(t) для выходной координаты y1 внутреннего контура;
2)хвх = g = yз2(t), хвых = y2 (t) - выходная координата внешнего контура.
б) реакция САР на управляющее воздействие:
1)хвх = F(t), хвых = y1(t);
2)хвх = F(t), хвых = y2 (t).
Для определения динамических и статических показателей двухконтурной САР необходимо для каждого случая получить передаточные функции разомкнутой и замкнутой САР. Показатели качества САР могут быть найдены частотными методами по ЛАЧХ и ЛФЧХ разомкнутых и замкнутых САР, а также более точно – по кривым переходных процессов, полученных по методу структурного моделирования на ЭВМ.
3.2. Передаточные функции разомкнутой и замкнутой САР по
управляющему и возмущающему воздействиям для выходной координаты внешнего и внутреннего контуров
Для начала рассмотрим передаточные функции внешнего замкнутого контура регулирования по управляющему воздействию для выходных координат внутреннего и внешнего контуров регулирования.
4. Для выходной координаты y2
Передаточная функция внешнего разомкнутого и замкнутого контуров для координаты y2 :
17
|
W |
|
|
|
(р)=W |
|
(р) W |
(р) |
1 |
|
= |
|
|
|
||||
|
|
|
|
|
То2 р |
|
|
|||||||||||
|
|
раз.2 |
|
|
рег.2 |
|
з.1 |
|
|
|
|
|||||||
= |
То2 |
|
|
|
|
1 |
|
|
|
|
|
1 |
|
= |
(17) |
|||
4 Тµ |
2 Тµ2 |
р2 + 2 Тµ р +1 |
То2 р |
|||||||||||||||
|
|
|
|
|
||||||||||||||
|
= |
|
|
|
|
|
1 |
|
|
|
|
|
|
; |
|
|
||
|
4 Тµ р (2 Тµ р(Тµ р +1) +1) |
|
|
|||||||||||||||
Где Wз.1( р) - передаточная функция внутреннего контура (14), т.е. этот контур является колебательным звеном;
Wз.2( р) = |
y2 ( р) |
= |
|
|
1 |
|
|
|
|
|
= |
||
yз2( р) |
4 Тµ р (2 Тµ р(Тµ р |
+1) +1) |
+1 |
||||||||||
|
|
|
(18) |
||||||||||
|
|
|
|
1 |
|
|
|
1 |
|
|
|||
= |
|
|
|
|
|
= |
. |
|
|
||||
8 Тµ3 р3 +8 Тµ2 р2 |
|
|
|
q3( р) |
|
|
|||||||
|
+ 4 |
Тµ р+1 |
|
|
|
|
|||||||
Выражения (14) и (15) показывают, что внешний замкнутый контуру по отношению к выходной координате имеет оптимальные передаточные функции системы третьего порядка (по управляющему воздействию).
Переходная функция системы, полученной на основании обратного преобразования Лапласа, будет определена выражением:
|
|
|
|
|
|
h |
|
(t) =1 |
−e−t / 2 Тµ |
− |
2 |
|
|
e−t / 4 Тµ |
sin( |
|
|
3 |
|
t |
); |
|
|
|
(19) |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
3 |
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
4 Тµ |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
или в относительных координатах h (t) =1−e2τ − |
2 |
|
e−τ sin( |
|
τ) |
|
|
|
|
||||||||||||||||||||||||||||
|
3 |
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где τ = |
t |
|
− относительное время переходного процесса |
|
|
|
|
|
|
||||||||||||||||||||||||||||
2i−1 T |
µ |
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В данном случае i = 2;n = 3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Характеристическое уравнение |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
q |
3 |
( p) = 8 Тµ3 |
р3 +8 |
Тµ2 р2 |
+ 4 Тµ р +1 = 0 ; |
|
|
|
(20) |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Корни характеристического уравнения |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
1 |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
. |
|
||||||||||
|
|
|
|
p |
|
= |
|
|
|
= − |
|
|
|
; p |
|
|
= − |
|
± j |
|
|
3 |
|
(21) |
|||||||||||||
|
|
|
|
|
|
|
|
|
2 Tµ |
|
|
|
|
4 Tµ |
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
1 |
|
|
|
2n−1 |
Tµ |
|
|
|
1,2 |
|
|
|
|
|
|
|
|
|
4 Tµ |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
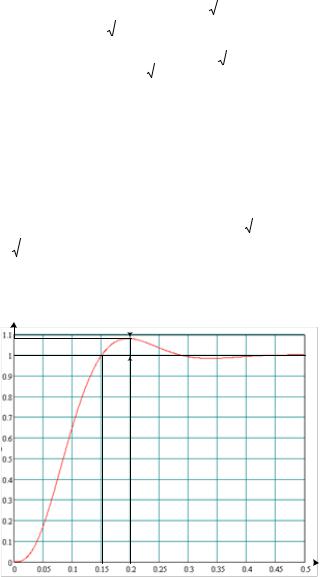
h(t) |
σ = 8,14% |
t1 = 7,6Tµ
t1 tm |
t |
18

Рис. 11 Кривая переходного процесса в оптимальной системе третьего порядка
Данные, по которым построен выше продемонстрированный график, представлены в таблице 2 Таблица № 5
h(t) |
0,2 |
0,65 |
0,82 |
1 |
|
1,0814 |
|
1,044 |
|
1,0363 |
1 |
0,985 |
1 |
1 |
|
t |
0,05 |
0,1 |
0,12 |
0,152 |
|
0,196 |
|
0,24 |
|
0,25 |
0,29 |
0,34 |
0,435 |
0,5 |
|
Переходная функция характеризуется следующими показателями |
|
|
|
|
|||||||||||
a. |
Перерегулирование σmax % = |
ymax − yуст |
|
100% = |
1,0814 −1 |
= 8,14%; |
|
|
|
|
|||||
yуст |
|
1 |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
b. |
Время первого достижения установившегося значения t1 = 7,6 Tμ = 7,6 0,02 = 0,152 . |
|
|
||||||||||||
c.Время первого достижения максимального значения tm = 9,8 Tμ = 9,8 0,02 = 0,196 .
d.Время переходного процесса (вхождения в 2-х процентную зону) t p ≈ 2 8,4 Tμ ≈ 0,435
Графическое изображение переходной функции системы третьего порядка представлено на рис. 11. Можно сказать, что для систем четвёртого и более порядков величины перерегулирование практически изменяется незначительно и составляет величину, равную σmax % = 8,1% (рис. 11). Однако время регулирования
при повышении порядка на единицу возрастает приблизительно в 2 раза, соответственно быстродействие уменьшается в 2 раза
Управление переходной функции, полученным на основании обратного преобразования Лапласа: для этой оптимальной системы запишется:
y |
2 |
(t) = y |
з2 |
h (t) = y |
з2 |
(1 |
−e−t / 2 Тµ |
− |
2 |
|
e−t / 4 Тµ sin( |
|
3 |
t |
)). |
(22) |
|
|
|
|
|
|
|||||||||||||
|
|
3 |
|
|
3 |
|
|
4 Тµ |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||
Кривая переходного процесса, построенная по выражения (19) имеет вид как на рис. 12. В рассмотренном случае внутренний замкнутый контур представлен колебательным звеном с передаточной функцией (20)
Wзам( р) = |
1 |
|
|
= |
1 |
|
|
= |
2 Тµ р (Тµ р +1) +1 |
2 Тµ2 р2 + 2 |
|
||||||
|
|
Тµ р +1 |
||||||
|
|
|
|
|
1 |
|
(23) |
|
|
= |
|
|
|
|
; |
|
|
|
Т2 р2 + 2 ε Т р +1 |
|
|
|||||
Однако, учитывая, что Тµ является малой некомпенсируемой постоянной времени и Тµ < 1, первым слагаемымв знаменателе можно пренебречь,т.к. 2Тµ2 << 1 .
В этой связи передаточная функция внутреннего замкнутого контура может быть представлена передаточной функцией апериодического звена первого порядка, следовательно, получаем следующее выражение
Wз.1( |
р) = |
|
|
|
|
1 |
|
|
1 |
|
= |
1 |
, |
(24) |
|
2 |
р |
2 |
+ 2 Тµ р +1 |
2 Тµ р +1 |
′ |
||||||||
|
2 |
Тµ |
|
|
|
Тµ р +1 |
|
|
||||||
Где Тµ′ = 2 Тµ − наименьшая некомпенсируемая постоянная времени внешнего контура.
Такая аппроксимация позволяет представить передаточную функцию внешнего замкнутого контура в виде
Wз.2( р) = |
y |
2 ( p) |
= |
1 |
|
= |
|
|
|
|
1 |
|
; |
(25) |
||
y |
|
|
( p) |
4 Тµ р(2 Тµ р+1) |
|
|
′2 |
р |
2 |
|
′ |
|||||
|
з.2 |
|
+1 2 |
+2 |
|
|
||||||||||
|
|
|
|
Тµ |
|
Тµ р+1 |
|
|
||||||||
|
|
|
|
|
|
19 |
|
|
|
|
|
|
|
|
|
|
Т.е. внешний замкнутый контур при в этом случае представляется колебательным звеном (второго порядка). Переходная функция внешнего контура в этом случае y2y ( p) = h2 (t) рассчитывается по тому же
выражению (194), что и для внутреннего контура представлена на рис. 12 Следовательно, при аппроксимации (упрощении) порядок системы снижается. При этом снижается
перерегулирование σ = 4,3% .
5. Для выходной координаты y1
Передаточная функция по управляющему воздействию для выходной координате внутреннего контура. Передаточная функция имеет следующий вид
|
|
|
|
|
|
|
|
y ( p) |
|
|
|
|
|
W рег.2( р) Wз.1( р) |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
Wз.2( р) = |
|
|
1 |
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
; |
|
|
|
|
|
|
|
|
||||
|
|
y |
з.2 |
( p) |
1 +W |
рег.2 |
( р) W |
з.1 |
( р)W |
2 |
( р) |
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
или |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Wз.2( р) = |
|
|
To2 ( p) |
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
To2 ( p) |
|
|
|
|
|
|
|
= |
To2 ( p) |
; |
||||||||
|
4 T µ p (2 Тµ (Тµ р+1) +1) |
|
|
|
8 Тµ3 р3 + |
8 |
Тµ2 р2 + 4 Т |
µ р |
+1 |
|
q3 (t) |
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
Аппроксимируя выражение |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
Wз.1( р) = |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
2 Тµ2 р2 +2 Тµ р+1 |
|
|
2 Тµ р+1 |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Получим |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
y1y |
( p) |
|
|
|
|
|
T |
( p) |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
T |
|
( p) |
|
|
|||||
Wз.2( р) = |
|
|
|
= |
|
|
|
|
o2 |
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
o2 |
|
. |
|
||||
y |
|
( p) |
|
|
|
′2 |
|
|
|
′ |
|
|
|
|
′2 |
|
|
|
2 |
|
|
′ |
|
|
|
(t) |
|
||||||||||||
|
|
з.2 |
|
4 |
|
|
+ 4 |
Т |
|
|
|
|
|
|
|
р |
+ 2 |
|
|
р+1 |
|
|
q |
2 |
|
|
|||||||||||||
|
|
|
|
|
Тµ |
µ |
р+1 2 Тµ |
|
|
|
Тµ |
|
|
|
|
|
|
||||||||||||||||||||||
Переходные характеристики могут быть найдены следующим образом. Из выражения следует, что y2 (t) = yз.2 h3 (t).
В то же время y1( p) = y2 ( p) T02 p. Отсюда можно записать
y1( p) = y2′ (t) T02 ,
y1(t) = yз.2 h3′(t) T02.
Следовательно, выходная координата y1 является производной от y2
y |
= |
Tо2 |
(e−t 2 Tµ + |
1 |
|
e−t 4 Tµ (sin( |
|
3 |
t |
) − |
|
cos( |
|
3 |
t |
))). |
|
|
|
3 |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||
1 |
2Tµ |
|
3 |
|
|
4 Tµ |
|
|
4 Tµ |
||||||||
|
|
|
|
|
|
|
|||||||||||
Для упрощения САР при аппроксимации внутреннего контура имеем: y1y (t) = yз.2 T02 h2′ (t),
где
|
|
h (t) =1- |
|
e−t 4 Tµ |
sin( |
t |
+ π ). |
|
||||||
|
2 |
|
||||||||||||
|
|
|
||||||||||||
|
2 |
|
|
|
|
|
|
4 Tµ |
4 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
Таким образом |
|
|
|
|
|||||
y |
(t) = |
|
T |
о2 |
e−t 2 Tµ′ (sin( |
1 |
|
+ π ) − cos( |
1 |
+ π )). |
||||
|
|
|
|
|
|
|||||||||
1y |
|
|
2 Tµ |
|
|
|
2 Tµ′ |
4 |
|
2 Tµ′ |
4 |
|||
|
|
|
|
|
|
|
||||||||
Кривые переходных процессов при управляющем воздействии для y1 и y2 представлены на рис. 12
(26)
(27)
(28)
(29)
20
y1(t)
y1
y1у
y2
y2у
t
Рис. 12 Переходные процессы передаточных функций САР по управляющему воздействию для выходных координат y1 и y2 (аналитический метод)
где y1 и y2 −соответственно выходные функции внешнего контура САР
где y1у и y2 у − соответственно выходные функции внешнего контура САР после аппроксимации
Тож е самое можно получить при использовании приложения MATLAB Simulink Данные для построения данной кривой представлены в следующей таблице
Таблица № 6
y1 |
|
y1у |
|
|
y2 |
|
y2 у |
|
||||
t |
|
y1 |
t |
|
y1у |
|
t |
|
y2 |
t |
|
y2 у |
0,02 |
|
0,5 |
0,01 |
|
0,6 |
|
0,04 |
|
0,1 |
0,0145 |
|
0,1 |
0,03 |
|
0,9 |
0,0125 |
|
0,73 |
|
0,05 |
|
0,2 |
0,025 |
|
0,26 |
0,04 |
|
1,3 |
0,02 |
|
1 |
|
0,075 |
|
0,4 |
0,034 |
|
0,4 |
0,05 |
|
1,7 |
0,027 |
|
1,3 |
|
|
|
0,085 |
0,047 |
|
0,6 |
|
|
|
|
|
|
21 |
|
|
|
|
|
|
|
|
|
|
0,06 |
|
2 |
|
|
|
0,04 |
|
|
1,6 |
0,1 |
|
0,7 |
|
0,056 |
0,71 |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
0,07 |
|
2,15 |
|
|
|
0,064 |
|
|
1,77 |
0,15 |
|
1 |
|
|
0,076 |
0,9 |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
0,082 |
2,22 |
|
|
|
0,07 |
|
|
1,7 |
0,2 |
|
1,08 |
|
0,09 |
|
1 |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
0,1 |
|
2,8 |
|
|
|
0,1 |
|
|
1,5 |
0,25 |
|
1,04 |
|
0,126 |
1,043 |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
0,125 |
1,56 |
|
|
|
0,13 |
|
|
1 |
0,28 |
|
1 |
|
|
0,15 |
|
1,03 |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
0,14 |
|
1,17 |
|
|
|
0,15 |
|
|
0,8 |
0,3 |
|
0,98 |
|
0,17 |
|
1,02 |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
0,17 |
|
0,44 |
|
|
|
0,174 |
|
|
0,5 |
0,45 |
|
1 |
|
|
0,2 |
|
1 |
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
0,19 |
|
0,09 |
|
|
|
0,2 |
|
|
0,25 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
0,2 |
|
0 |
|
|
|
0,226 |
|
|
0,1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
0,22 |
|
-0,2 |
|
|
|
0,25 |
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
0,25 |
|
-0,25 |
|
|
0,3 |
|
|
-0,1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
0,3 |
|
-0,1 |
|
|
|
0,34 |
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
0,35 |
|
0,02 |
|
|
|
0,35 |
|
|
0,02 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
0,37 |
|
0,04 |
|
|
|
0,4 |
|
|
0,04 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
0,5 |
|
0 |
|
|
|
0,5 |
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
Теперь построим те же кривые, но в среде MATLAB Simulink |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
Для этого необходимо в данном приложении построить соответствующую схему |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2,75 |
|
|
|
|
|
|
1 |
|
|
|
|
+ |
|
|
|
4,545 |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
0,0008 р2 +0,04 p +1 |
|
|
|
|
|
|
|
|
|
|
|
р |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Signal 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Осцилограф |
||
Истоник |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
2,75 |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
+ |
|
|
|
|
4,545 |
|
|
|
|
|
1 |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
0,04 p +1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
р |
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 13 Схема для исследования кривых переходных процессов по управляющему воздействию для выходных координат y1 и y2 в среде MATLAB Simulink
22
Полученный результат можно увидеть на рис. 14
y(t)
y1
y1у
y2 у
 y2
y2
t
Рис. 14 Переходные процессы передаточных функций САР по управляющему воздействию для выходных координат y1 и y2 (MATLAB Simulink)
По кривым |
переходных процессов (по табличным данным), рассчитанным аналитическим и на ЭВМ, |
|||
могут быть |
определены |
основные |
показатели |
качества регулирования статических САР: |
y1.max , σmax ,t1, tm , t рег и др. |
Для этого |
могут быть |
использованы такие логарифмические частотные |
|
характеристики, построенные для статической САР.
Теперь необходимо рассмотреть реакцию статической двухконтурной системы на возмущающее воздействие.
4. Для выходной координаты y1
Передаточная функция разомкнутой системы:
|
|
Wраз.fy ( p) =Wрег.2 (р) Wз.1(р) Wo2 (p) = |
|
|
|
|||||||||
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
= |
То2 |
|
1 |
|
1 |
|
= |
|
|
|
|||
|
|
4 Тµ |
(2 Тµ2 р2 +2 Тµ р+1) |
|
То2 р |
|
|
|
|
|||||
|
|
= |
|
|
|
1 |
|
|
; |
|
|
|
|
|
|
|
8 Тµ3 р3 +8 Тµ2 р2 +4 Тµ р |
|
|
|
|
|
|||||||
Соответственно для замкнутой системы |
|
|
|
|||||||||||
W |
( p)= |
|
|
1 |
|
|
|
|
= |
|
1 |
; |
||
8 Тµ3 р3 +8 Тµ2 р2 + 4 Тµ р +1 |
q3 |
|
||||||||||||
зам.fy1 |
|
|
|
|
( p) |
|
||||||||
(30)
(31)
23
Следовательно, при возмущающем воздействии реакция системы в отношении координаты y1 будет такой же, как при управляющем воздействии в отношении координаты y2 . Аналогично при аппроксимации внутреннего замкнутого контура передаточная функция разомкнутого и замкнутого контуров будет:
|
|
|
Wраз.fy |
( p) |
= |
|
|
|
1 |
|
; |
|
|
|
|
|
|
|
|
|
2 Tµ′ |
p(Tµ′ |
p +1) |
|
|
|
|
|
|||||||
|
|
|
1 |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
W |
зам.fy1 |
( p)= |
1 |
|
|
|
= |
|
|
1 |
|
|
= |
|
1 |
; |
|
2 Tµ′ p(Tµ′ p |
+1) |
+1 |
2 Tµ′ p2 +2 Tµ′ p +1 |
q2 |
( p) |
||||||||||||
|
|
|
|
|
|||||||||||||
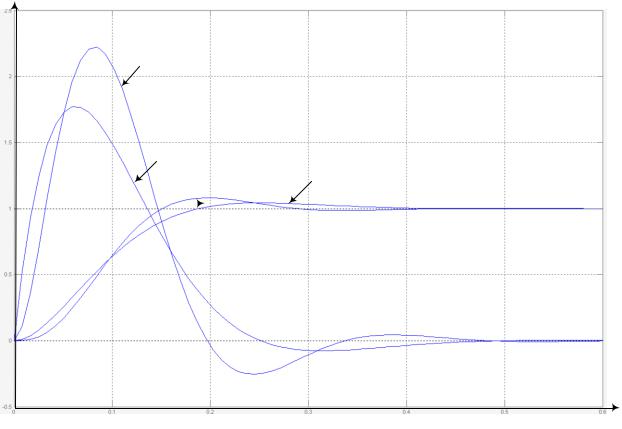
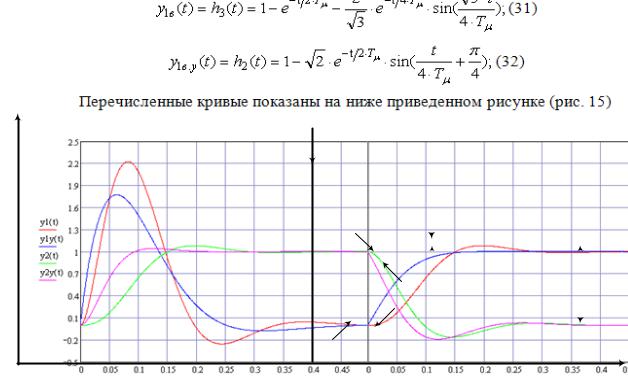
Таким образом, переходная функция y1(t) при возмущающем воздействии может быть построена по следующим выражениям:
y |
(t) = h |
(t) =1−e−t 2 Tµ − |
2 |
|
e−t 4 Tµ |
sin( |
|
3 |
t |
); |
|||||||
|
|
|
|
|
|
||||||||||||
1в |
|
3 |
|
3 |
|
|
|
|
|
4 Tµ |
|||||||
|
|
|
|
|
|
|
|
|
|||||||||
y |
|
(t) = h (t) =1− |
|
e−t 2 Tµ sin( |
|
t |
+ π ); |
||||||||||
|
2 |
|
|||||||||||||||
|
|
|
|||||||||||||||
1в.у |
|
2 |
|
|
|
|
|
|
|
4 Tµ |
4 |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Перечисленные кривые показаны на ниже приведенном рисунке 15 |
|||||||||||||||||
y(t) |
|
|
|
|
|
F (возмущающее воздействие) |
|||||||||||
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
σ% =8,1% |
|
|
|||
1В.у |
|
|
|
y1В |
|
|
∆ст |
|
|
||
|
|
||
|
|
||
y2В.у |
|
|
|
y2В
(32)
(33)
(34)
(35)
t
Рис. 15 Кривые переходных процессов САР по возмущающему воздействию
24
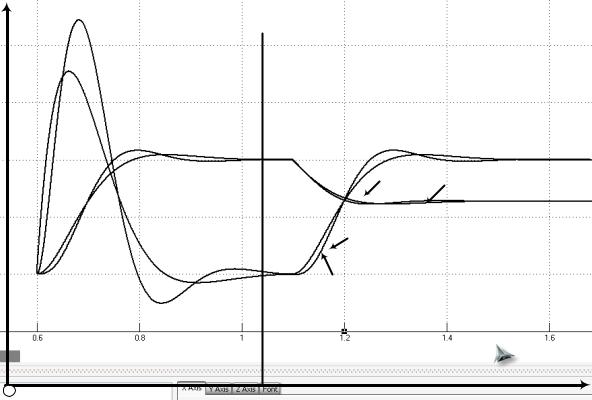
Таблица № 7
|
y1В |
y1Ву |
y2В |
|
y2Ву |
||||
t |
|
y1В |
t |
y1Ву |
t |
|
y2В |
t |
y2Ву |
0,04 |
|
0,09 |
0,016 |
0,2 |
0 |
|
1 |
0 |
1 |
0,05 |
|
0,2 |
0,023 |
0,3 |
0,013 |
|
0,8 |
0,028 |
0,8 |
0,076 |
|
0,4 |
0,03 |
0,4 |
0,03 |
|
0,53 |
0,05 |
0,5 |
0,096 |
|
0,6 |
0,04 |
0,5 |
0,045 |
|
0,32 |
0,06 |
0,4 |
0,1 |
|
0,7 |
0,063 |
0,7 |
0,0625 |
|
0,048 |
0,085 |
0,1 |
0,132 |
|
0,9 |
0,0785 |
0,8 |
0,073 |
|
0 |
0,099 |
-0,02 |
0,15 |
|
1 |
0,1 |
0,9 |
0,082 |
|
-0,07 |
0,12 |
-0,12 |
0,198 |
|
1,08 |
0,122 |
0,95 |
0,091 |
|
-0,124 |
0,145 |
-0,16 |
0,24 |
|
1,048 |
0,13 |
0,963 |
0,163 |
|
-0,12 |
0,18 |
-0,113 |
0,27 |
|
1 |
0,141 |
0,97 |
0,184 |
|
-0,066 |
0,21 |
-0,046 |
0,3 |
|
0,99 |
0,17 |
0,99 |
0,215 |
|
-0,004 |
0,25 |
0 |
0,348 |
|
0,98 |
0,2 |
1 |
0,4 |
|
0 |
0,3 |
0 |
То же самое можно получить, воспользовавшись пакетом MATLAB Simulink, предварительно собрав схему на рис. 16.
y(t) |
Управляющее |
Возмущающее |
|
||
|
воздействие |
воздействие |
y1В y1Вy
y2Вy
y2В
t
Рис. 16 Кривые переходных процессов по управляющему и возмущающему воздействиям, построенные в среде
MATLAB Simulink
Чтобы получить переходную функцию при возмущающем воздействии необходимо задать время установки Тk = 55 Tµ
Получаем переходные функции представленные на рис. 16
25
5. |
Для выходной координаты y2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
Передаточная функция разомкнутой системы: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
Wраз.f , y2 ( p) = |
|
1 |
|
|
|
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
To2 p |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
W |
|
( p) =W |
рег.2 |
( р) W |
зам.1 |
( р) = |
|
Tо2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
о2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 Тµ 2 Tµ2 p2 + 2 Tµ p +1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
Wзам. f ,y |
|
( р) = |
|
|
|
|
|
|
|
|
|
|
|
|
Wраз.fy2 ( p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= − |
|
4 Тµ |
|
× |
|
|
|
|
|
(2 Tµ2 p |
2 + 2 Tµ |
p +1) |
|
= |
||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
2 |
1+Wо2 ( p) Wрег.2 ( |
р) Wзам.1 |
( р) |
|
|
T |
|
|
|
|
|
|
(8 Tµ3 p3 |
+8 Tµ2 p2 + 4 |
|
Tµ p +1) |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
о2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(36) |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 Тµ |
|
|
q |
|
|
|
( р) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= − |
|
|
2 |
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
q |
3 |
( р) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
о2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
В случае аппроксимации внутреннего замкнутого контура (Тµ′ |
= 2 Тµ ) |
порядок уравнений снижается на |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
один, поэтому |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 Т |
µ′ |
|
|
|
|
|
|
|
|
|
|
(Тµ′ p +1) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 Тµ′ |
|
|
q ( р) |
|
|
|
|
y2 y ( р) |
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
W |
зам.F |
, y |
|
|
( р) = − |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= − |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
= |
|
|
|
|
|
|
. |
|
|
(37) |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
(2 Tµ′2 |
|
p2 |
|
|
+ 2 Тµ′ |
p |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F( |
р) |
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
+1) |
|
|
|
|
T |
|
|
|
|
|
q |
2 |
( р) |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
о2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
о2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Отсюда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
2 Тµ′ |
|
|
|
q |
|
( р) |
|
|
|
|
|
|
|
|
2 |
Тµ′ |
|
|
|
2 |
|
Тµ′ p +1 |
|
|
|
|
|
|
|
|
|
|
|
|
4 |
Tµ |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
2 Тµ′ |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
y |
2 y |
( р) = |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
F( р) = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F |
( р) |
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
|
|
|
|
|
|
|
р |
F( р). |
(38) |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
T |
|
|
|
|
q |
2 |
( р) |
|
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
|
|
|
q |
2 |
( р) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
q |
2 |
( |
р) |
|
|
|
q |
2 |
( р) |
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
о2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
о2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
о2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
Поэтому для переходной функции выходной координаты при возмущающем воздействии можно записать |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y2в.y (\t) = |
4 Tµ |
|
[h2 (t) + 2 Тµ′ h2′ (t)], |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
о2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Где |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
h2 (t) −оптимальная переходная функция системы второго порядка |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
− |
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
− |
|
t |
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
π |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
π |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 Tµ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 Tµ |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
h2′ |
(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
e |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
e |
|
|
. |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
= − |
4 T |
|
cos |
4 |
T |
+ |
|
4 |
|
|
|
|
|
|
|
+ 4 |
T |
|
|
sin |
4 |
T |
+ |
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
µ |
|
|
|
|
|
|
|
|
|
µ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
µ |
|
|
|
|
|
|
µ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
Следовательно, для переходных функций можно записать следующие выражения |
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 Tµ |
|
|
|
|
− |
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
3 t |
|
|
|
|
3 t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 Tµ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
y2в.y (\t)= − |
|
|
|
|
|
1−e |
|
|
|
|
|
|
|
|
|
|
|
|
|
sin |
4 |
T |
|
+cos |
4 |
T |
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
(39) |
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
µ |
|
|
|
|
|
|
|
µ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
о2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Учитывая, |
что при единичном возмущающем воздействии F( p) =1 на входе системы имеется задающее |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
возмущающее |
воздействие |
|
(возмущение) |
|
|
|
yзад. =1. |
|
Результирующая |
|
переходная |
|
|
функция |
|
для выходной |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
координаты упрощенной аппроксимированной системы при возмущающем воздействии будет определяться следующим выражением:
|
4 Tµ |
|
|
t |
|
− |
t |
|
|
|
|
|
4 Tµ |
|
|||||
y2в.y (\t)= yзад. − |
|
1 |
|
|
|
e |
|
. |
(40) |
T |
−cos |
4 T |
|
|
|||||
|
|
|
µ |
|
|
|
|
|
|
|
о2 |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
26 |
|
|
|
|
|
|
|
Аналогично путём подобных преобразований можно получить функцию и для полной неаппроксимированной системы:
y2в.y (\t)= yзад. − 4TTµ о2
|
− |
t |
|
|
|
|
|
|
t |
|
|
|
t |
|
|
||||
1 |
|
3 |
3 |
|
|||||||||||||||
4 Tµ |
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
1 |
−e |
|
|
|
|
|
sin |
|
|
|
|
+cos |
|
|
|
. |
(41) |
||
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
3 |
|
4 T |
|
4 T |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
На рис. 15 представлены кривые переходных процессов статической САР по управляющему и возмущающему воздействиям для выходных координат y1В и y1В.y внутреннего и y2В и y2В.y внешнего
контуров регулирования.
3.3. Расчет и построение асимптотических ЛАЧХ и
ЛФЧХ разомкнутых САР
3.3.1.Управляющее воздействие
Разомкнутая САР при управляющем воздействии, когда выходом является выходная величина внешнего контура, представляет собой последовательно соединенные колебательное и интегрирующее звенья.
Wраз.2 ( р) =Wрег.2 ( р) Wзам.1 ( р) Wо2 ( р) = |
|
|
1 |
|
|
= |
1 |
|
|||||||||||
4 |
Тµ р(2 Тµ2 р2 + 2 |
Тµ р +1) |
0,08 р(0,0008 р2 + 0,04 |
р +1) |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
L(ω) = −20 lg |
|
(1 −T 2ω2 )2 + 4ξ 2T 2ω2 |
− 20 lg 4Tµω = −20 lg |
|
(1 − 0,0008ω2 )2 + 0,0016ω2 − 20 lg 0,08ω |
|
|||||||||||||
ϕ(ω) = −arctg( |
|
2ξωT |
) − 90 = −arctg( |
0,04ω |
) − 90 |
|
|
|
|
|
|
||||||||
1 −T 2ω2 |
1 − 0,0008ω2 |
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
=0,707. |
|
|
|
|
|
|
|
|
|
|||||
где T = |
|
Tµ =0,028 с, а ξ = |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
||||
2 |
|
|
|
|
|
|
|
|
|
||||||||||
|
2 |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Для упрощенного внутреннего контура разомкнутая САР представляет собой последовательно соединенные апериодическое и интегрирующее звено.
Wраз2 у ( р) =Wрег2 ( р) Wзам1у ( р) W02 ( p) = |
|
1 |
|
= |
|
1 |
|
||||
4Tµ p(2Tµ p +1) |
|
|
0,08 p(0,04 p +1) |
||||||||
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
||||
L(ω) = −20 lg 1 + 4Tµ |
2ω2 − 20 lg 4Tµω = −20 lg 0,08ω − 20 lg |
|
1 + 0,042 ω2 |
||||||||
ϕ(ω) = −arctg(2Tµω) −90 = −arctg(0,04ω) −90 |
|
|
|
|
|
|
|
||||
Разомкнутая САР при управляющем воздействии, когда выходом является выходная величина внутреннего контура, представляет собой последовательно соединенные колебательное и пропорциональное звенья.
Wраз.вн ( р) =Wрег2 |
( р) Wзам1 |
( р) = |
T02 |
= |
0,12 |
|
4Tµ (2Tµ2 p2 + 2Tµ p +1) |
0,08(0,0008 p2 + 0,04 p +1) |
|||||
|
|
|
|
27