

29. Методы теории оптимального управления
В тех=их задачах на управление накладывается ограничения по энергетическим ресурсам, и ограничения на фазовые координаты из соображения прочности и безопасности.
Матем. Аппаратом для нахождения экстремалей явл-ся вариационное исчисление.
Можно выделить 4 основных метода вариц. Исчисления, к-ые исп-ся для решения задач оптимального управления:
Применение ур-ия Эйлера
Принцип максимума
Динамическое программирование
Нелинейное программирование (Прямой вариционный метод).
Основное применение метода, исп-го ур-ие Эйлера – это задачи, где экстремалями явл-ся гладкие ф-ии, а экстемезируемый функционал и дополнительные условия задаются нелинейными функциями координат.
Ур-ие Эйлера обычно применяют для решения задач оптимального управления, где по физическому смыслу трудно ожидать решение в виде разрывных функций и где ограничения и функционал существенно нелинейны.
![]() -
уравнение Эйлера
-
уравнение Эйлера
Принцип мак-ма наиболее эффективно дает решение для линейных оптимальных задач, где ограничение задано в виде неравенств, этот метод развился для управления сис-ми, где управление – это кусочно-линейная ф-ия.
В основу метода дин-го програм-ия положен принцип оптимальности, этот метод развивался как аппарат исследования одношаговых оптимальных решений. Этот метод чаще применяется в задачах с дискретным временем, т.е. когда ур-ия записаны в виде разностных выражений.
Мет-ды нелин. Прогр-ия – это по сущ-ву методы автоматической оптимизации, сюда относ-ся:
градиентный метод
метод наискорейшего спуска
метод по координатной оптимизации
симплекс метод
Особенность применения этих методов в автомат-х сис-ах оптимизации состоит в том, что оптим-ая ф-ия представляет собой выходную величину объекта, а совокупностью независимых переменных явл-ся управляющие воздействия.
30. Адаптивные системы управления. Классификация адаптивных сау.
Адаптивные – приспосабливающ-ся. Задачи создания АСАУ по постановке близки к задачам оптимального управления, здесь так же требуется отыскать управ-щее возд-ее и алгоритм упр-ия, к-ый обеспечивает экстремальные значения выбранного критерия. Здесь так же ставится цель наилучшего управления. АСАУ могут рассматриваться как сис-мы с элементами искусственного интилекта. Назначение АСАУ состоит в том, чтобы заменить человека-оператора при принятии решений об улучшении характеристик сис. В процессе нормальной эксплуатации.
Некоторые объекты или технологические процессы отличаются тем, что их статические и динамические хар-ки изменяются в широких пределах непредвиденным заранее образом. Оптимальное упр-ие такими объектами возможно с помощью сис. В к-ых недостающая инф-ия автомотически пополняются самой сис-ой в процессе работы.
Классификация:
Системы
дуального упр-ия - сис. в к-ых рабочий
сигнал исп-ся двояко: для обеспечения
функционирования; для приспособления
к условиям внешней среды.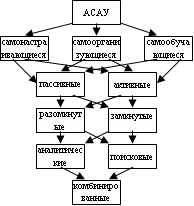
Самонастраивающиеся –(сис с парам-кой адоптацией) использую текущую инф-ию о хар-ах внешних воздействий и о динамических хар-ах объекта эти сис-ы осущ-ют контролируемые изменения пар-ов регулятора, что обеспецивает улучшения качества функц-ия сис-мы.
Самоорганизующиеся – (функционально-адаптивные) уменьшение априорной определенности достигается в них путем исп-ия инф-ии, получаемой в ходе непрерывного измерения доступных вх. И вых. Сигналов.
Самообучающиеся – информация о неизвестных хар-ах процесса и окр. Среды вырабатываются ими в ходе обучения, эта инф-ия в дальнейшем исп-ся для оценивания и принятия соответствующих решений с целью улучшения качества работы сис-мы.
Пассивные - в этих сис-х контролирование изменения пар-ов или хар-к осущ-ся программно, к-ая составляется на основе априорной инф-ии на стадии проектирования сис, априорная – инф-ия о внешних и внутренних воздействий.
Активные – в актив-х сис контролируемые изменение собственных хар-к осущ-ся не только на основе априорной информации но и в зависимости от текущей инф-ии об условиях работы сис-мы.
Р азомкнутые
– самонастройка проходит с учетом
изменения хар-к сис и вх-го сигнала.
Текущая инф-ия об этих изменениях
получается на основе сигнала ошибки.
Самонастройка выполняется дополнительным
корректир-им устр-ом Wk(S),
к-ый вкл-ся , например, когда сигнал
ошибки превышает заданное пороговое
значение, т.е. это сис обнаруживает
изменения вх сигнала при наличии шумов
или изменения парам-ов сис-мы.
азомкнутые
– самонастройка проходит с учетом
изменения хар-к сис и вх-го сигнала.
Текущая инф-ия об этих изменениях
получается на основе сигнала ошибки.
Самонастройка выполняется дополнительным
корректир-им устр-ом Wk(S),
к-ый вкл-ся , например, когда сигнал
ошибки превышает заданное пороговое
значение, т.е. это сис обнаруживает
изменения вх сигнала при наличии шумов
или изменения парам-ов сис-мы.
З амкнутые
– (АСАУ с замкн. Циклом настройки) они
отлич-ся от разомкн-х наличием допол-го
замкнутого контура самонастройки, этот
контур служит для анализа эффекта
изменения качества Эта автокол-ая сис
с НЭ в прямой цепи. Эта сис обладает
способностью изменять передаточный
коэф-т прямой цепи т.о. чтобы обеспечить
оптимальный процесс управления.
амкнутые
– (АСАУ с замкн. Циклом настройки) они
отлич-ся от разомкн-х наличием допол-го
замкнутого контура самонастройки, этот
контур служит для анализа эффекта
изменения качества Эта автокол-ая сис
с НЭ в прямой цепи. Эта сис обладает
способностью изменять передаточный
коэф-т прямой цепи т.о. чтобы обеспечить
оптимальный процесс управления.
А налитические
– АСАУ, к-ая само подстраивается к
изменению хар-к вх сигнала. Вх сигнал
сумма полезного сигнала U
и случ помехи f.
Этот вх сигнал одновременно подается
на вход вычислительного устр-ва ВУ1.
пусть хар-ки составляющих вх сигнала
заранее не известны, но априорные инф-ие
о них имеются. Такая сис работает след
образом вычисл устр-во ВУ1 оценив пар-ры
полезного вх сигнала U(t)
формирует имп-ую передат ф-ию (ИПФ)
kopt(t).
Эта ИПФ сравнивается с ИПФ сис, к-ая
вырабатывается ВУ2. на основе этого
сравнения происходит подстройка, т.е.
формируется сигнал Ucc
и на основе этого сигнала происходит
сближение kopt(t)
и k().
Если неконтролир-ые пар-ры изменяются,
то процесс самонастройки повторяются.
налитические
– АСАУ, к-ая само подстраивается к
изменению хар-к вх сигнала. Вх сигнал
сумма полезного сигнала U
и случ помехи f.
Этот вх сигнал одновременно подается
на вход вычислительного устр-ва ВУ1.
пусть хар-ки составляющих вх сигнала
заранее не известны, но априорные инф-ие
о них имеются. Такая сис работает след
образом вычисл устр-во ВУ1 оценив пар-ры
полезного вх сигнала U(t)
формирует имп-ую передат ф-ию (ИПФ)
kopt(t).
Эта ИПФ сравнивается с ИПФ сис, к-ая
вырабатывается ВУ2. на основе этого
сравнения происходит подстройка, т.е.
формируется сигнал Ucc
и на основе этого сигнала происходит
сближение kopt(t)
и k().
Если неконтролир-ые пар-ры изменяются,
то процесс самонастройки повторяются.
Поисковые – в этих АСАУ опред-ие значений контролируемых параметров осущ-ся в рез-те поиска, т.е. ищется экстремум ф-ии качества, при этом поиск осущ-ся в такой области, в к-ой положение рабочей точки обеспечивает требуемые статические и динамические хар-ки сис.