

Определить чувствительность для системы:
(Tp + 1)y(t) = kx(t), чувствительность по Т и по к - ?
Введём 2 функции чувствительности.
Перепишем уравнение в стандартной форме:
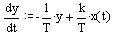
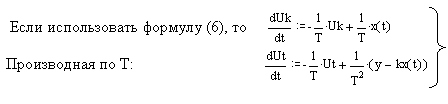 -
уравнения чувствительности для данной
системы
-
уравнения чувствительности для данной
системы
Что же касается функции и коэффициентов чувствительности для показателей качества, то их определяем проще, поскольку там не будет дифференцирования.
19. Управляемость систем управления.
Р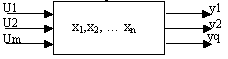 ассмотрим
линейные системы, динамика которых
описывается дифуранениемn
– порядка. В этом случае состояние
системы будет определятся n
– координатами. Эти координаты состояния
системы не обязательно будут совпадать
с физическими величинами, в т.ч. и с
выходными координатами.
ассмотрим
линейные системы, динамика которых
описывается дифуранениемn
– порядка. В этом случае состояние
системы будет определятся n
– координатами. Эти координаты состояния
системы не обязательно будут совпадать
с физическими величинами, в т.ч. и с
выходными координатами.
Система может описываться через входные и выходные величины или через координаты состояния.
В общем случае обозначение выходной управляющей величины через y от 1 до q.
Входные координаты обозначаются через U от 1 до m.
В качестве системы можно рассмотреть либо замкнутую САУ, тогда координаты U будут играть роль задающих воздействий G.
Либо сложно управляемые объекты, тогда величина U будет являться управляющим воздействием со стороны регулятора. Уравнение динамики линейной системы можно представить в виде:

c = cx (2) – в такой записи х – координата состояния системы.
Управляемость.
Управляемостью системы – называют такое её свойство, что под действием некоторого управления U(t) в течении конечного отрезка времени её можно перевести из любого начального состояния х0 в начало координат, соответственно х = 0. В этом случае система называется управляемой.
Если же этим свойством система обладает не для всех начальных условий, то она будет не полностью управляемой.
Могут быть также и полностью неуправляемые системы.
Для определения управляемости существует теорема Каплана(надо составить матрицу и определить её ранг) G = [B |AB| A2B| ….. |An-1B] (3)
Матрица имеет размерность n*nm
Теорема: Система будет полностью управляемой, если ранг r матрицы G будет = n.
Если r = 0 то система полностью неуправляема, если r > n, то система будет не полностью управляемой. Можно выделить част системы порядка r , которая будет управляемой, а остальная часть – неуправляемой.
Если исследуемая система имеет один вход с управляемым воздействием U, то m = 1 и матрица (3) будет квадратной размерностью n*n.
Если матрица квадратная, то для полной управляемости необходимо чтобы определить матрицы G 0, т.е. матрица G была невырожденной.
20. Наблюдаемость систем управления.
Р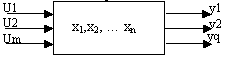 ассмотрим
линейные системы, динамика которых
описывается дифуранениемn
– порядка. В этом случае состояние
системы будет определятся n
– координатами. Эти координаты состояния
системы не обязательно будут совпадать
с физическими величинами, в т.ч. и с
выходными координатами.
ассмотрим
линейные системы, динамика которых
описывается дифуранениемn
– порядка. В этом случае состояние
системы будет определятся n
– координатами. Эти координаты состояния
системы не обязательно будут совпадать
с физическими величинами, в т.ч. и с
выходными координатами.
Система может описываться через входные и выходные величины или через координаты состояния.
В общем случае обозначение выходной управляющей величины через y от 1 до q.
Входные координаты обозначаются через U от 1 до m.
В качестве системы можно рассмотреть либо замкнутую САУ, тогда координаты U будут играть роль задающих воздействий G.
Либо сложно управляемые объекты, тогда величина U будет являться управляющим воздействием со стороны регулятора. Уравнение динамики линейной системы можно представить в виде:

c = cx (2) – в такой записи х – координата состояния системы.
Наблюдаемость.
Непосредственно наблюдается величинами, являющимися выходными величинами y, которые можно измерить.
Наблюдаемостью системы - называют такое её свойство, когда путём её наблюдения или измерения её выходные величины y(t) при заданных входных управлениях U(t) на интервале времени 0 t T можно определить все координаты начального состояния системы х. В этом случае система будет полностью наблюдаемой.
Система будет не полностью наблюдаемой если через измерение выходной величины определяются не все координаты начального состояния системы.
Пусть система уравнений задана в формуле (1) и (2). Следуя теореме Калмана составляем матрицу n*nq.
Матрица имеет вид. Н = [CT |ATCT |(AT)2CT| …| (AT)n-1CT]
Система будет полностью наблюдаемой если ранг матрицы Н будет = n. n – порядок матрицы А.
Система будет не полностью наблюдаемой если ранг матрицы Н r<n. Можно выделить наблюдаемую часть которая будет иметь порядок r. В том случае, когда имеется одна измеряемая величина y матрица С будет иметь одну строку, а транспортируемая матрица – один столбец.
Для полной наблюдаемости требуется чтобы матрица состояла из одних нулей.
С точки зрения управляемости и наблюдаемости нельзя в передаточных функциях сокращать одноимённые сомножители и переставлять сомножители местами.