

Глава 23. Конструкции промышленных роботов
-
ПРОМЫШЛЕННЫЕ РОБОТЫ АГРЕГАТНО-МОДУЛЬНОГО
ТИПА
Создание широкого диапазона конструкций ПР возможно только при использовании унифицированных узлов и блоков (модулей). Применение агрегатно-модульного принципа построения ПР снижает их стоимость по сравнению с универсальными.
О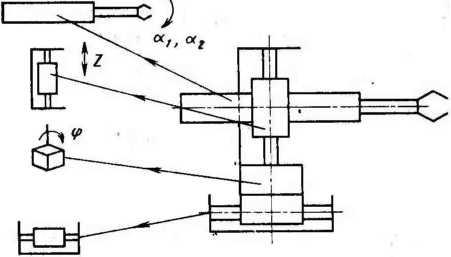 сновные
модули (основания, захватные устройства,
поворотно-подъемные механизмы и др.)
в зависимости от назначения могут
иметь несколько типоразмеров. Различают
ПР напольного, тельферного
и
мостового типов.
сновные
модули (основания, захватные устройства,
поворотно-подъемные механизмы и др.)
в зависимости от назначения могут
иметь несколько типоразмеров. Различают
ПР напольного, тельферного
и
мостового типов.
![]()
Рис. 163. Схема построения отдельных модификапий агрегатной гаммы ПР
X
Рис.
163. Схема построения отдельных модификапий
агрегатной гаммы ПР
Технические
данные агрегатной гаммы промышленных
роботов ЛМ40Ц.00.00 [0]
|
Испол нение |
Число степеней подвижности При КОМПО' иовке |
ИИ |
г, мм |
г, мм |
ф, • |
а,. ° |
|
|||
|
47 |
20 |
06 |
40 |
|||||||
|
01 |
6 |
5 |
4 |
5 |
500 |
500 |
500 |
270 |
180 |
180 |
|
02 |
6 |
5 |
4 |
5 |
1000 |
|||||
|
03 |
5 |
4 |
3 |
4 |
500 |
— ' |
||||
|
04 |
5 |
4 |
3 |
4 |
1000 |
— |
||||
|
05 |
4 |
3 |
2 |
3 |
500 |
— |
— |
|||
|
06 |
4 |
3 |
2 |
3 |
1000 |
— |
— ' |
|||
Таблица 18
Примечание. Грузоподъемность 40 кг. Привод — гидравлический. Система управления — цикловая. Метод программирования перемещений — по упорам. Погрешность позиционирования ±2,0 мм. Наибольший вылет руки 1885 мм. Скорости линейных перемещений: 0,2; 0,35; 0,6 м/с. Угловая скорость перемещений: 90 и 180 °С. Схема кодификации моделей: ЛМ40Ц 47.01, где 47 — компоновка; 01 — исполнение.
Роботы этой гаммы предназначены для автоматизации технологических процессов в литейных цехах с поточным характером производства. Они используются, например, в составе комплексов литья по выплавляемым моделям. Роботы могут также применяться для съема и переноса отливок в составе комплексов литья под давлением.
Комплект промышленных роботов серии СМ40 содержит 10 типоразмеров напольных стационарных и передвижных роботов. Этот ряд создан на базе 16 универсальных модулей механической системы: четырех типоразмеров рук для перемещения зажима и поворота заготовки; трех типоразмеров захватных устройств для различных деталей; трех типоразмеров оснований; двух типоразмеров устройств приводов для линейного перемещения и вращательного движения руки; трех типоразмеров системы управления на базе программных барабанов. У всех роботов этой серии предусмотрен гидравлический привод на базе гидроцилиндров с управлением от индивидуальных электрозолотниковых устройств. Цикловая позиционная система управления с программоносителем, выполненным в виде командоаппарата, имеет ограниченное число точек позиционирования. Смена программы осуществляется путем замены барабана командоаппарата. Основные характеристики и область применения этих промышленных роботов приведены в табл. 19.
Гамма электромеханических роботов модульного типа универсального назначения типа РПМ-25 разработана на базе группы модулей, включающих стационарное и подвижное основания в напольном или подвесном исполнении, блоки сдвига, подъема, одинарного и двойного качания, радиального хода, три модификации рук (с одной, двумя и тремя степенями свободы). Комбинацией модулей (без их повторения в одной инструкции) можно получить 95 модификаций промышленных роботов.
Технические данные модулей приведены в табл. 20.
Кинематическая схема наиболее распространенного электромеханического робота МП-4 приведена на рис. 164. На основании 1 закреплен коробчатый корпус, сваренный из листовой стали. Внутри корпуса расположены механизмы подъема рук и поворота их вокруг вертикальной оси. Поворот осуществляется от мотора 18 через редуктор и шестерню 16, находящуюся в зацеплении с колесом 17, которое жестко закреплено на трубе 15, соединенной с барабаном 14. На наружной поверхности барабана выполнены Т-образные пазы, в которых закреплены флажки, входящие при повороте в пазы бесконтактных переключателей 12, выдающих команду на остановку. Точная доводка до позиции обеспечивается штоком пневмоцилиндра 13, воздействующим на жесткий упор, закрепленный на барабане. Механизм подъема состоит из электродвигателя 5, который через червячный редуктор 4 и шестерню 3 связан с рейкой, выполненной заодно с трубой 15. Промежуточных позиций механизм подъема не имеет и работает от упора до упора.
*5 Таблица 19
00
Технические характеристики я области
обслуживания типового ряда промышленных
роботов [9]
•
Г-
Рычажно-захватное
устройство
Зона
Область
Тип
gö
5
и
о
Тнп
и количество
Область
перемещения
обслуживания
(наи
|
Система
обслуживания
к
О
о т
о
&І
Число
1 пеней боды
Привод
,•
по
вертикали, ми
по
горизонтали,
1Ш
при
вращении,
° •
больший
радиус),
мм
управления
Машины
для литья под давлением
Стационарный
20
6
Выд
вижной
0)
Гидравли
ческий
340
1250
180/90
2470
Цикловая
Вертикальные
прессы усилием
*
10
5
То
же (2)
Пневма
тический
150
800
180/180
2000
»
!<■«)
кН
Кузнеч
но- прессовые машины (загрузка
заготовок
ш
160
5
>
Гидравли
ческий
900
До
1000
180/—
до
2000
*
с
горизонтальной осью)
—/180
Оборудование
на автоматизированных линиях и
участках
Тельферный,
стационарный или передвижной
160
6
Трех-
шариир- ное (1)
Электро-
гидравли-
чеекий
1900
800—
1000
1900
Позиционная
с ЧПУ
Шахтные
печи
Передвижной,
подвесной
(тельферный)
40
5
То
же
То
же
1900
850
180/—
1900
То
же
То
же, в составе
термического
агрегата
То
же
80
5
Выд
вижной
0)
Г
идравли- ческий
750
Вдоль
фронта
печей
180/—
1900
Цикловая
Линии
гальванопокрытий
Передвижной
(тельферный)
500
3
То
же
То
же
1200
или
1500
Ог
1000 до 25 000
1300.
1700, 2400 (ширина ванн)
»
*
В числителе — вокруг вертикальной оси,
в знаменателе — вокруг горизонтальной.
Таблица
20
Технические
данные модулей агрегатной гаммы РПМ-25
18]
Модуль
Код
Угловая
или линейная ско-
Номинальное
усилие или номинальный момент
Погрешность
позиционирования с датчиком
ремещеиия
аналоговым
кодовым
Поворота
Подъема
Сдвига
Качания
Радиального
хода
300°
400 мм 800 мм 60° 1000 мм
135
°/с 0,4 м/с 0,6 м/с 45 °/с 0,6 м/с
800
Н-м
2500
Н 2000 Н 3000 Н-м 2000 Н
±4
мин ±0,4 мм ±0,8 мм ±2 мин ±0,8 мм
±0,56
мин ±0,05 мм ±0,1 мм ±0,22 мин ±0,1 мм
Двойного
качания: нижний рычаг
90°
65
°/с
1800
Н-м
±3
мин
±0,4
мин
иерхний
рычаг
90°
65
°/с
1800
Н-м
±3
ми и
±0,4
мин
Руки:
вращение
360°
180%
200
Н-м
±10
мин
±1,3
мни
сгибание
200°
180
°/с
200
Н-м
±10
мин
±1,5
мин
Тележки
(подвижного
основания)
10
м
1,5
м/с
700
Н
±2
мм
±0,4
мм

Рнс. 164. Кинематическая схема промышленного робота ПМ-4
Рука робота крепится к трубе 15. В продольном направлении рука перемещается с помощью электродвигателя 11 через реечную передачу 10. На корпусе руки закреплена накладка с Т- образными пазами, в которых устанавливаются передвижные флажки 8 для грубой остановки перемещения с помощью бесконтактных переключателей. Точная остановка осуществляется пневмоцилиндром 7, вилка которого входит в контакт с роликовыми упорами, также установленными на накладке 9. Захватное устройство выполнено в виде вакуумного присоса 6, из которого принудительно отсасывается воздух. Положение робота относительно оборудования выверяется четырьмя винтами 2. Робот МП-4 оснащен цикловой системой программного управления.
ПР тельферного типа (с перемещением руки по монорельсу) по сравнению с роботами напольного типа позволяет экономить производственные площадки и осуществлять перемещение объемов манипулирования над технологическим оборудованием. Применение опорных систем большой длины обеспечивает возможность компоновать участки с групповым обслуживанием нескольких технологических установок одним роботом при их линейном расположении.
Мостовая схема ПР позволяет создавать более жесткие и динамические устойчивые схемы. Однако мостовые схемы более громоздки и требуют увеличения массы опорной системы. Характерным признаком этой группы ПР является наличие траверсы или моста, по которому перемещается каретка с рукой; при этом мост перемещается по своим направляющим.
-
ИНТЕРАКТИВНЫЕ ПРОМЫШЛЕННЫЕ РОБОТЫ
Управление интерактивных роботов осуществляется попеременно оператором и автоматической системой. Интерактивные роботы, в отличие от биотехнических, оборудованы элементами памяти для автоматического выполнения отдельных операций.
Промышленный робот МКП-2,5 предназначен для работы в составе ковочных комплексов, в состав которых входят нагревательная печь, ковочный пресс, интерактивный робот. Управление роботом осуществляется автоматизированной системой, обеспечивающей чередование во времени автоматического режима управления с биотехническим.
Робот МКП-2,5 (грузоподъемность 2,5 т) разработан в напольном исполнении. Тележка перемещается по двухрельсовому пути на четырех колесах. Максимальный путь перемещения тележки составляет 10 м. Тележка может перемещаться со скоростью до 0,6 м/с. Длина тормозного пути тележки не превышает 5 см, а тормозной путь руки 1,5 см. При ковке заготовки под действием бойка пресса рука робота имеет возможность упруго опускаться. Возникающие' при этом усилия демпфируются гидропневматическим аккумулятором. Наибольший вылет руки 1180 мм.
Привод продольного движения тележки осуществляется от двух электродвигателей через редуктор и звездочку, сцепленную с неподвижными цевочными механизмами.
Система числового программного управления является четырехкоординатной. Она обеспечивает три программируемых движения робота (подъем руки, перемещение руки параллельно рельсовому пути и ротацию захватного устройства) и управляет бойком пресса. Зажим и разжим клещей захватного устройства, боковой сдвиг руки и движение тележки по рельсам управляются вручную оператором.
Оператор, управляя роботом, обеспечивает захват заготовки из нагревательной печи, перенос ее в рабочую зону пресса, съем и укладку готовой поковки. Ковка происходит автоматически по сигналу оператора (продолжительность ковки 10 ... 20 мин).
При необходимости оператор может управлять работой всего комплекса вручную.
Интерактивное управление, описанной конструкции робота носит название автоматизированного, когда происходит чередование во времени автоматического режима с биотехническим.
Роботы с супервизориым управлением, в которых переход от одного автоматического цикла к другому осуществляется оператором, еще не нашли промышленного применения.
-
АДАПТИВНЫЕ ПРОМЫШЛЕННЫЕ РОБОТЫ
Основным критерием, по которому тот или иной робот можно отнести к классу адаптивных ПР, является наличие адаптивного управления. Под адаптивным управлением. ПР понимают управление исполнительным устройством робота в функции от контролируемых параметров внешней среды и работа с автоматическим изменением внешней программы.
По виду сенсорного оснащения известные модели адаптивных промышленных роботов можно разделить на три группы: с тактильными датчиками прикосновения, с датчиками контроля усилия или момента сил, с дистанционными датчиками.
Адаптивный промышленный робот типа УМ160 оснащен сенсорным модулем для поиска, опознавания, измерения и захватывания деталей типа тел вращения, имеющих однорядное расположение в ориентирующих магазинах. Сенсорный модуль (рис.. 165) оснащен электромеханическим тактильным датчиком 5, имеющим штырь 4, который может перемещаться в вертикальном направлении под действием усилия, приложенного к его основанию. На основании штыря закреплено подвижное коромысло 6 так, что возможен его поворот. Перемещение штыря и коромысла фиксируется датчиком положения 5. Конструктивно тактильный датчик выполнен в виде сменного сенсорного модуля, который крепится к руке рядом с захватным устройством 3. Поиск детали осуществ-
Рис. 165. Сенсорное оснащение промышленного робота
ляется сканированием пространства магазина 1 с ориентирующими призмами в горизонтальной плоскости. При соприкосновении коромысла с деталью 2 оно поворачивается, а штырь перемещается вверх. В этот момент в систему управления подаются два сигнала: первый на перемещение захватного устройства на расстояние, обеспечивающее его выход в вертикальную плоскость, проходящую через ось детали, и второй — на захват детали. Расстояние между осями симметрии захватного устройства и коромысла устанавливается равным шагу позиций ориентирующего магазина тары. Если требуется взять и уложить деталь в предыдущую позицию, сигнал датчика служит командой к прерыванию продольного перемещения робота и началу укладки детали; когда тре буется взять очередную заготовку, сигнал датчика дает команду на продолжение движения на шаг и далее иа взятие заготовки.
-
ЗАХВАТНЫЕ УСТРОЙСТВА
Захватные устройства, являющиеся одним из основных элементов ПР, служат для захватывания и удержания в определенном положении объекта манипулирования. Они должны обеспечивать надежный захват и удержание деталей, различных по геометрии, размерам и массе, в пределах, предусмотренных параметров робота. Конструкция, размеры и форма захвата зависят от массы, формы, размеров, материала транспортируемого объекта и других параметров. Усилие, потребное для обеспечения надежности захвата груза, зависит от соотношения направлений действия зажима и движения. Усилие зажима, направленное перпендикулярно движению, должно быть значительно больше усилия зажима, направленного вдоль движения: это позволяет существенно упростить конструкции захватов и при одинаковых усилиях повысить скорость передачи грузов.
Захватные устройства можно классифицировать по принципу действия, по числу рабочих позиций, по виду управления, по характеру крепления на руке и т. д.
По принципу действия различают схватывающие, поддерживающие и удерживающие захватные устройства.
Схватывающие захватные устройства удерживают объект рабочими элементами (губками, пальцами, клещами и т. п.) за счет сил
5. ПРИВОДЫ ПРОМЫШЛЕННЫХ РОБОТОВ
трения или комбинации сил трения и запирающих усилий. Все схватывающие устройства подразделяются на две группы. К первой относятся механические устройства: клещи, тиски, шарнирные пальцы Вторая группа объединяет захваты с эластичными рабочими камерами, деформирующимися под действием нагнетаемого внутрь воздуха или жидкости.
Поддерживающие захватные устройства для удержания объекта используют нижнюю поверхность, выступающие части объекта или имеющиеся в его корпусе отверстия. К таким устройствам относятся крюки, петли, вилки, лопатки и захваты питателей, не зажимающие заготовок.
Удерживающие захватные устройства обеспечивают силовое воздействие на объект, обусловленное различными физическими эффектами. Наиболее распространены вакуумные и магнитные устройства. Встречаются захватные устройства, использующие эффект электростатического притяжения, адгезии и т. п.
По числу рабочих позиций захватные устройства можно разделить на однопозиционные и многопозиционные.
По виду управления захватные устройства подразделяются на четыре группы: неуправляемые, командные, жесткопрограммируемые и адаптивные
Неуправляемые захватные устройства — это устройства с постоянными магнитами или с вакуумными присосками без принудительного разрежения. Для снятия объекта с таких захватов требуется усилие большее, чем усилие его удержания.
Командные захватные устройства управляются только коман дами на захватывание или отпускание объекта. К этой группе относятся захватные устройства с пружинным приводом, оснащаемые стопорными устройствами и срабатывающие через такт. Губки пружинных устройств разжимаются и зажимаются благодаря взаимодействию их с объектом манипулирования или с элементами внешнего оборудования (аналогично механизмам, используемым в конструкциях шариковых авторучек).
>Кесткопрограммируемые захватные устройства управляются системами программного управления роботов. Перемещение губок, взаимное расположение рабочих элементов, усилие зажима в таких устройствах изменяются в зависимости от заданной программы.
Адаптивные захватные устройства — программируемые устройства, оснащенные различными первичными преобразователями внешней информации (формы поверхности и массы объекта, усилия зажима, наличия проскальзывания объекта относительно рабочих элементов захватного устройства и т, п.).
По характеру крепления к руке промышленного робота все захватные устройства можно разделить на сменные и стационарные.
Неуправляемые механические захватные устройства выпол няются в виде пинцетов, разрезанных упругих валиков и втулок (цанг) или клещей с одной и двумя подвижными губками, находящимися под действием пружин. Разжим рабочих элементов таких захватных устройств происходит при контакте с заготовкой, из-за чего могут быть повреждены поверхности детали или зажимных элементов. Деталь удерживается вследствие упругого воздействия зажимных элементов, а высвобождается принудительно благодаря дополнительным устройствам. Эти захватные устройства применяют в условиях массового производства или манипулирования с объектами небольшой массы и небольших габаритных размеров.
Неприводные захватные устройства со стопорными механизмами, обеспечивающими чередование циклов зажима и разжима деталей, не требуют специальных команд от системы управления и дополнительного подвода энергии. Детали удерживаются силой пружин вследствие эффекта самозатягивания или запирающего действия губок. Как правило, работа подобных захватных устройств возможна только при их вертикальном положении.
Наиболее распространены конструкции клещевого тина Дви жение губок обеспечивается пневмо-, гидро- или электроприводом. Преимущества пневмопривода — простота, удобство подвода энергии (один шланг), отсутствие течи, легкость регулирования уси лия зажима, возможность использовании в агрессивных средах и зонах высоких температур. Недостаток большие габаритные размеры при сравнительно малых усилиях зажима. Гидропривод широко применяют, так как он обеспечивает значительные усилия зажима при малых габаритных размерах и его можно легко регулировать. Электропривод ввиду сравнительной сложности пока применяют ограниченно.
Основными элементами вакуумных захватных устройств являются присоски и устройства дли создания вакуума. Присоски изготовляют из резины или пластика.
Электромагнитные захватные устройства часто компонуют из небольших электромагнитов, установленных на общей раме. Такие устройства обычно применяют для переноса фасонных, круглых и ребристых поверхностей, захватить которые вакуумными устройствами либо трудно, либо невозможно.
Захватные устройства с эластичными камерами применяют для переноса хрупких изделий небольшой массы, имеющих не правильную форму. Действие таких устройств основано на деформации эластичной камеры под действием давления воздуха или жидкости. Захватные устройства с эластичными камерами применяют для удержания деталей как за наружную, так и за виу тре 1! НН1Ю повер X НоСТЬ.
Выбор типа привода определяется функциональным назначением ПР. Независимо от вида привода к нему предъявляются следующие общие требования: минимальные габаритные размеры, высокие энергетические показатели, возможность работы в режиме автоматического управления и регулирования, высокое быстродействие, безопасность, возможность встраивания систем охлаждения и терморегулирования, надежность, удобство монтажа и обслуживания.
ПР оснащаются электрическими, пневматическими, гидравлическими и комбинированными приводами.
Электрический привод обеспечивает хорошие динамические характеристики, повышенную точность позиционирования (менее ±1 мм) и широкую маневренность. В состав электропривода входят усилители мощности, управляемые двигатели, передаточные механизмы, датчики обратной связи по скоростям и положению, сравнивающие устройства.
В настоящее время широкое распространение получил дискретный (шаговый) привод с управляющим шаговым двигателем. Расширяется применение следящих приводов на базе электродвигателей постоянного тока.
Пневматический привод состоит из пневмоцилиндров (для создания поступательного движения), пневмодвигателей (для вращательного движения), привода с крутящим моментом (для колебательного движения), пневмоклапанов (для управления и регулирования скорости перемещения и остановки поршня), а также электромагнитных клапанов, работающих на переменном и постоянном токе и управляющих одновременно несколькими каналами.
Для роботов с пневмоприводом возможно применение систем управления струйной автоматики. К преимуществам таких при водов и систем управления относятся безотказность в работе, сокращение необходимой производственной площади (у электросистем аппаратура располагается в отдельном шкафу, у пневмо- систем— обычно непосредственно на механических узлах), низкая стоимость, простота обслуживания и ремонта. Пневматический привод во многом сходен с гидравлическим, но не имеет обратного трубопровода.
Гидравлический привод, как правило, применяют для роботов грузоподъемностью более 10 кг с повышенной точностью позиционирования. Он также находит применение для роботов с большой зоной обслуживания (например, в Швеции создан робот с гидроприводом грузоподъемностью 1,5 т; высота подъема груза 6000 мм; рука имеет вылет 5000 мм; скорость движения 1 м/с).
Комбинированный электрогидравлический сервопривод, управляемый от электрических сервомоторов малой мощности, применяют, в частности, для промышленных роботов, мощность которых не может быть достигнута с помощью обычных приводов. Гидро усилители момента и линейные гидроусилители представляют собой приводы для осуществления вращательного и поступатель ного движения захватных устройств и рук роботов.
Комбинированный гидроэлектропривод, используемый для роботов грузоподъемностью свыше 15 кг, имеет ряд достоинств: повышенные точность позиционирования и скорость движения рабочих органов, возможность увеличения числа программируемых точек при позиционных системах управления. В комбинированных пневмогидравлических приводах предварительное позиционирование подвижных устройств осуществляется пневмоприводом, а окончательное — гидравлическим приводом.
Приводы ПР располагаются на станине либо непосредственно на рабочих органах. Первый способ предпочтительней, так как расположение приводов по второму способу обычно сопровождается увеличением габаритных размеров и массы рычажнозахватного устройства, что сказывается на грузоподъемности и других параметрах робота.
Контрольные вопросы и задания
-
Расскажите об устройстве и назначении робота типа ЛМ40.
-
Расскажите о роботах серии СМ40.
-
Расскажите об универсальных роботах серии РПМ-25.
-
Как устроен напольный робот с выдвижной рукой?
-
Расскажите о назначении и принципе работы роботов тельферного и мостового типов.
-
Как устроены и работают интерактивные промышленные роботы?
-
Какие конструкции рецепторов используются у адаптивных роботов?
-
По каким принципам классифицируются захватные устройства?
-
Как устроены и работают механические захватные устройства?
-
Как устроены и работают вакуумные и электромагнитные устройства?
-
Какие типы электроприводов применяются в роботах?
-
Как устроен и работает пневматический электропривод роботов?
-
Как устроен и работает гидравлический привод роботов?
-
Как устроен и работает комбинированный привод роботов?
-
Л А В А 24. СИСТЕМЫ УПРАВЛЕНИЯ
ПРОМЫШЛЕННЫМИ РОБОТАМИ
-
НАЗНАЧЕНИЕ И КЛАССИФИКАЦИЯ СИСТЕМ
УПРАВЛЕНИЯ
Основное назначение системы управления ПР заключается в формировании определенной последовательности его действия и обеспечение автоматической работы всех механизмов в соответствии с заданной программой. Система управления обеспечивает связь робота с технологическим оборудованием, которое он обслуживает. Заданная программа определяет порядок раз
личных движений робота и реализуется с помощью различных средств электро-, пневмо- или гидроавтоматики в зависимости от применяемого типа привода.
Системы управления могут быть классифицированы по характеру обработки программ, по характеру программирования» по способу представления информации, по способу управления И т. д.
По характеру обработки программы системы управления разделяются на жесткопрограммируемые, адаптивные и гибкопрограммируемые.
В жесткопрограммируемых системах управления программа содержит полный набор информации и не корректируется при изменении параметров внешней среды.
В адаптивных системах управления программа не содержит полной информации о параметрах внешней среды. В процессе работы адаптивная система воспринимает недостающую информацию с помощью внешних устройств. Такая система допускает изменение технологического процесса и упрощает программирование.
В гибкопрограммируемых системах управления используется программа, сформированная на основе поставленной цели и информации об объектах и явлениях внешней среды.
По характеру программирования системы управления подразделяются на позиционные, контурные и комбинированные. У позиционных систем управления задаются начальное и конечное положения рабочих органов промышленных роботов. В зависимости от числа точек позиционирования различают малоточечные (число точек пдзиционирования не превышает десяти) и многоточечные (число программируемых позиций может достигать нескольких сотен) позиционные системы. При контурном управлении положение рабочего органа робота определяется в каждый момент времени. Комбинированные системы управления могут обеспечивать как позиционное, так и контурное управление.
По способу представления информации различают электромеханические, цикловые, числовые, аналоговые и гибридные системы управления. В электромеханических системах геометрическая информация представлена в виде физического аналога (положения на управляющих, упоров и т. п.). В таких системах могут быть использованы обычные схемы релейной автоматики, обеспечивающие определенную последовательность выполнения шагов программы. Однако электромеханические системы характеризуются наименьшими функциональными возможностями.
В системах циклового программного управления программа задается в виде чисел, а геометрическую информацию выдают соответствующие путевые и конечные выключатели. Перестройка программы осуществляется либо с помощью штекерной панели, либо с помощью считывающего устройства с перфоленты. Системы циклового программного управления используются только в роботах с малым числом позиций.
В аналоговых системах управления программа задается и хранится в виде напряжения В качестве элементной базы в них используются операционные усилители постоянного тока. Аналоговые системы по своим функциям практически не отличаются от цикловых.
В системах числового программного управления программа представляется в числовом виде и хранится на быстросменных носителях (магнитных барабанах, дисках и лентах). Для преоб разования аналоговых входных сигналов системы числового программного управления оснащаются аналого-цифровыми преобразователями. Эти системы обеспечивают максимальные функциональные возможности роботов. Они контролируют результаты выполнения действий манипулятора и параметров внешней среды. При использовании нескольких ПР с числовым программным управлением они объединяются в одну систему, подключаемую к внешней ЭВМ.
В гибридных системах управления используются различные сочетания рассмотренных систем управления.
По способу управления системы делят на замкнутые и разомкнутые. В замкнутых системах управляющее устройство получает информацию о фактическом состоянии ПР и окружающей среды. Это позволяет формировать управляющие сигналы с учетом полученной информации. В разомкнутых системах входная информация отсутствует, что усложняет процесс управления и требует тщательного соблюдения технологического процесса. Изменение эксплуатационных характеристик ПР в таких системах приводит к снижению точности позиционирования, т. е. к снижению надежности работы.
-
УНИФИЦИРОВАННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
Для управления ПР в СССР разработаны и серийно выпускаются три группы унифицированных систем (машин) программного управления. К первой группе относятся унифицированные цикловые машины (УЦМ), ко второй — унифицированные позиционные машины (УПМ) и к третьей — унифицированные контурные машины (УКМ) Рассмотрим основные типы унифицированных систем.
Малоточечные цикловые системы позиционного управления типа УЦМ. Промышленность выпускает три модификации этих систем: УЦМ-10, УЦМ-20 и УЦМ-663, которые различаются в основном числом выходных сигналов и вспомогательных команд. Системы управления этого типа предназначены для ПР, обслуживающих кузнечно-прессовое оборудование, литейные машины, линии гальванопокрытий и металлорежущие станки в условиях массового и крупносерийного производств. Такие системы ком-
Технические
данные унифицированных систем управления
УЦМ [9|
Характеристика
УЦМ-10
УЦМ-20
УЦМ-663
Число
управляемых координат
2—10
7
6
Число
точек позиционирования
2
3
3
Емкость
памяти (число команд), в том
30
32
128
числе:
тех
нологически X
12
7
12
управляющих
роботом
16
15
30
11
рограммо носитель
Коммута
Плато
с
Интеграль
ционное
диодными
ное
поле
штекерами
Возможность
сопряжения с ЭВМ
Есть
Нет
Нет
Тип
датчика положения
Микровы
Бескон
Бескон
ключатель
тактный
тактный
Таблица 21
плектуют роботами с ограниченными манипуляционными возможностями, имеющими небольшое число точек позиционирования по каждой степени подвижности. Командный сигнал систем УЦМ представляет собой напряжение определенной полярности, появляющееся на соответствующей выходной шине. Длительность командного сигнала может быть установлена по времени либо по сигналу от конечного выключателя, расположенного на соответствующем рабочем органе робота. В табл. 21 приведены основные технические данные этих систем.
Числовые системы позиционного управления УПМ. Выпускаются в модификациях У ПП-331, УПМ-552 и УПМ-772, различающихся числом управляемых координат и типом управляемого привода. Они предназначены для управления ПР со значительным числом точек позиционирования по каждой координате и могут применяться для комплектации роботов, осуществляющих автоматизацию обслуживания различного технологического оборудования, подъемно-транспортных операций, простейших сборочных работ и операций контактной точечной сварки; при этом число единиц обслуживаемого оборудования не должно превышать четырех.
Системы УГ1М построены по принципу синхронного микропрограммного автомата с конечным числом состояний и жестким циклом управления и унифицированы по структурно-алгоритмическому и конструкторско-технологическому принципам. Вся командная, технологическая и геометрическая (в абсолютных значениях) информация с пульта обучения и пульта управления записывается в оперативную память устройства, откуда она может быть переписана для длительного хранения на магнитную ленту кассетного накопителя. Технологическая информация включает до шестидесяти управляющих команд. Операционно-логический
Технические
данные унифицированных систем управления
УПМ |9|
Характеристика
УПМ-331
УПМ-552
УПМ-772
Привод
Шаговый
Следящий
Следящий
Число
программируемых координат
3
5
7
Число
двоичных разрядов для обра
15
15
15
ботки
геометрической информации
Число
степеней точности
—
3
3
Точность
позиционирования, ед. диск
±1
1
1
ретности
Коррекция
движения
Есть
Нет
Есть
Потребляемая
мощность, кВт
1,5
1,0
1,0
Система
отсчета
В
абсолютных значениях
Метод
программирования
Обучение
Программоноситель
Накопитель
на
магнитной ленте с
емкостью
хранимой
600К бит
информации
Память
Оперативное
запоминающее устройство
Число
входных каналов
на
100—
-120
кадров программы
32
Число
скоростей
8
Индикация
Цифровая
Таблица 22
блок совместно с микропрограммным автоматом обеспечивает взаимодействие всех блоков устройства и осуществляет центральное управление и логическую обработку информации.
Программирование методом «обучения» производится на медленных скоростях движения робота и представляет собой последовательное занесение информации об отдельных кадрах рабочей программы в оперативное запоминающее устройство.
Управление степенями подвижности ПР и задание скорости перемещения при обучении осуществляются с пульта обучения. Набор технологической и вспомогательной информации, в том числе условий выполнения программы, скоростей рабочего перемещения, степеней подвижности, параметров тары и т. п., происходит на пульте управления устройства.
Устройства типа УПМ осуществляют цифровую индикацию и световую сигнализацию о нормальных режимах работы роботов, а также об отклонениях этих режимов от заданного. В табл. 22 приведены основные технические данные устройств типа УПМ.
Устройства контурного управления типа УК.М. Выпускаются промышленностью в двух модификациях УКМ-552, У,КМ-772, которые различаются числом управляемых координат, и предназначены для управления ПР, имеющими сложное пространственное перемещение исполнительного органа по заданной траектории. Такие движения необходимы для окраски, дуговой сварки и сложных сборочных операций. Для управления подобными ПР
и хранения рабочей программы требуется значительная емкость управляющего вычислительного устройства. Роботы со сложным движением, как правило, управляются с помощью микроЭВМ или микропроцессора.
Вычислитель устройств У КМ реализова н на базе микроЭВМ «Электроника-60», программоноситель выполнен в виде накопителя на гибких магнитных дисках с емкостью хранимой информации до 12,8 Мбит
Устройства типа У КМ принимают сигналы от органов управления роботами, от их измерительных преобразователей, от контакторов управления приводами технологического оборудования, от инструментов (краскопульты, сварочные головки) и устройств, а также от аварийных конечных выключателей.
Устройство обеспечивает плавную остановку рабочих органов манипулятора в позицию, соответствующую началу рабочей программы.
При обработке программы могут быть использованы безусловные и условные переходы. Выбор требуемой программы осуществляется по соответствующим сигналам от объекта (число сигналов 4 для УКМ-552 и 5 для У КМ 772) или от органов пульта управления.
Пульт управления встроен в стойку и является ее неотъемлемой частью. Технические данные рассмотренных устройств приведены в табл. 23.
Для многофункциональных ПР, решающих разнообразные производственные задачи, в ряде случаев требуется комбинированное (контурное и позиционное) управление. Подобные системы управления должны быть универсальными и обеспечивать задание геометрической информации и в абсолютных значениях, и
Таблица
23
Технические
данные контурных систем управлення
У
КМ (9|
Харп
ктер истиКа
У
КМ-552
У
КМ-772
Число
про!раммируемых координат
5
7
Измерительный
преобразователь
Потенциометр
Кодовый
СП4
датчик
Число
команд:
техноло!ических
8
32
от
внешнего оборудования
8
8
Число
двоичных разрядов для
обработки
16
16
геометрической
информации
Точность
позиционирования, ед. дискрет
±1
±1
ности
Привод
Следящий
Метод
программирования
Обучение
Интерполяция
Линейная
в приращениях, а также иметь возможность адаптивного управления с учетом информации, поступающей извне.
Система числового программного управления С85. Создана на базе встроенной ЭВМ со свободным .программированием и обеспечивает комбинированное управление с возможностью адаптации к внешней среде. В основе системы используется микроЭВМ «Электроника-60».
Система обеспечивает: управление восемью координатами; позиционирование с остановкой по сигналам датчиков; обработку программы с обращением к подпрограммам; покадровую отработку программы; оперативную коррекцию скоростей и перемещений; развитую систему индикации, включая индикацию текущего кадра, отработку перемещений, кодов ошибок; редактирование управляющих программ с выводом информации на дисплей; текстовый контроль функционирования. Перемещения задаются как в абсолютных значениях, так и в приращениях.
В базовый комплект системы входят процессор, таймер, пульт управления, блок сопряжения с роботом, блок ввода-вывода данных, блок питания, запоминающее устройство. В состав дополнительных устройств входят дисплей, перфоратор, устройство вывода на печать, внешнее запоминающее устройство.
-
ИНФОРМАЦИОННЫЕ СИСТЕМЫ
Кроме рассмотренных систем управления ПР осна- ■ щаются информационными системами, в значительной мере определяющими их функциональные возможности, сложность решения задач и эффективность использования. Информационные системы используются также дня обеспечения безопасности обслуживающего персонала. В зависимости от выполняемых функций информационные системы разделяются на системы восприятия информации о внешней среде, системы контроля состояния ПР и системы обеспечения техники безопасности.
Системы восприятия информации о внешней среде. Они подразделяются на визуальные, локационные системы и системы искусственного осязания.
В визуальных системах для получения зрительного изображения чаще всего используются устройства монокулярного или бинокулярного искусственного зрения. В качестве датчиков применяют видиконы (передающие телевизионные трубки), фотоматрицы (наборы фотоэлементов) и т. п., управляемые от ЭВМ. С помощью этих систем определяют местоположение, объекта по отношению к руке робота, контролируют наличие объекта в захватных устройствах или проводят классификацию по форме простых объектов.
Роботы с визуальными системами пока получили недостаточное распространение, что объясняется в основном длительностью времени обработки информации.
Локационные системы условно можно разделить на две группы: системы дальней и системы ближней локации рабочего простран ства. Первые могут быть построены с использованием ультразву ковых, лазерных и светолокационных оптических систем.
Ультразвуковые дальномеры позволяют измерять расстояния до объекта в диапазоне до 2 м с погрешностью 2 %. Точность определения угловых координат (т. е. положения объекта) у ультразвуковых дальномеров значительно ниже, поскольку облучается большая часть поверхности предмета, что затрудняет выделение его локального участка дня измерения. Поэтому ультразвуковые дальномеры используют для обнаружения объекта и грубого определения его положения в пространстве.
Локационные устройства на основе лазерных излучателей определяют пространственное положение объектов с весьма высокой точностью Однако подобные устройства не находят широкого применения на практике. Это объясняется сложностью аппаратуры, большими габаритными размерами и высокой стоимостью.
Широкое применение могут найти с в е т о л о к а ц и о н- н ы е системы. В них рабочее пространство «ощупывается» световыми или инфракрасными лучами. В качестве излучателей используются лампы накаливания, светодиоды и другие излучающие свет приборы, в качестве приемников — различные конструкции с использованием фотодиодов и фоторезисторов. Точность определения расстояния с помощью светолокационных систем может достигать 2 мм на расстоянии до 2 м.
Системы ближней локации могут быть построены и на основе индукционных, магнитных и струйных преобразователей (датчиков). Наилучшими эксплуатационными характеристиками среди них обладают струйные преобразователи, действие которых основано на взаимодействии потока сжатого воздуха, вытекающего из сопла, с предметом локации. Недостатком струйных преобразователей является необходимость применения пнев- моэлектрических преобразователей входного сигнала в электрический сигнал.
Общим недостатком дистанционных преобразователей, применяемых в локационных системах, является зависимость выходных сигналов от отражательной способности, неровности поверхности и материала исследуемых предметов; кроме того, исследуемая поверхность должна быть перпендикулярна световому лучу или воздушному потоку. Более универсальное применение имеют преобразователи, работающие на просвет (например, для контроля наличия объекта в захватном устройстве).
Особенностью работы систем искусственного осязания является наличие контакта датчиков с поверхностью объекта. С их помощью могут быть решены следующие задачи: поиск и обнаружение предметов, определение их положения; распознавание формы и их классификация; определение параметров объектов (масса, твердость, температура, теплопроводность и электропроводность и т. п.); контроль за микроперемещениями деталей при выполнении некоторых сборочных операций; контроль смещений объекта в захватном устройстве робота при воздействии на него динамических нагрузок.
Простейшими первичными преобразователями искусственного осязания являются тактильные преобразователи контактного типа. Они располагаются на наружных и внутренних поверхностях захватного устройства робота. В качестве чувствительных элементов используют микропереключатели и электропроводящие полимеры. Такие преобразователи рекомендуются для решения задачи контроля наличия детали в захватном устройстве, правильности ее центрирования, а также для поиска и распознавания пространственно не ориентированных предметов.
Контактные преобразователи могут быть объединены в матрицы. Это позволяет упростить определение ориентации объекта в пространстве, получить информацию о зоне контакта между захватным устройством манипулятора и удерживаемым объектом.
При использовании матриц следует учитывать ряд факторов. При низкой плотности расположения преобразователей в матрице могут быть применены микропереключатели, реле и т. п. Более высокие функциональные возможности ПР обеспечиваются при использовании матриц из пропорциональных преобразователей, которые применяют в основном для решения задачи классификации и определения формы объектов манипулирования.
Преобразователи усилия (моментов) применяют в роботах, осуществляющих манипулирование хрупкими и легко- деформируемыми предметами или выполняющих простые операции сборки. В первом случае преобразователи усилий позволяют регулировать усилие захвата пропорционально массе захватываемых объектов.
Для измерения усилий применяют два способа: по упругой деформации чувствительного элемента и по перемещению подвижной части чувствительного элемента.
Системы контроля состояния ПР. Обеспечивают требуемые эксплуатационные характеристики, включая надежность роботов, и участвуют в организации требуемых параметров движения. В силу этого системы контроля состояния ПР должны содержать: систему оценки положения ц скорости движений робота, обеспечивающую регистрацию фактического его состояния в каждый момент времени и сравнение с требуемыми параметрами движения; систему аварийной блокировки, обеспечивающую предотвращение поломок как механической системы ПР, так и обслуживаемого им технологического оборудования при появлении случайных сбоев; систему диагностики и прогнозирования ресурса роботов, предназначенную для сокращения времени восстановления их работоспособности и уменьшения числа отказов путем проведения соответствующих профилактических работ.
Система оценки положения и скорости перемещения узлов и механизмов является специализированной для конкретного типа Г1Р.
Основными требованиями, предъявляемыми к преобразователям таких систем, являются надежность, малые габаритные размеры и масса, помехоустойчивость к воздействию окружающей среды, простота юстировки, возможность отсчета абсолютных значений и низкая стоимость.
Для ПР со следящим приводом в состав системы входят первичные преобразователи положения и скорости перемещения отдельных степеней подвижности. В качестве преобразователей скорости применяют серийно выпускаемые тахогенераторы ТД-103, Г1Т-1, ТГ1-11 либо двигатели постоянного тока серии ДГ1М. В качестве первичных преобразователей положения используют проволочные потенциометры, индуктивные и индукционные преобразователи типа вращающихся трансформаторов.
Системы аварийной блокировки предназначены для предохранения ПР и обслуживаемых ими механизмов от поломок при появлении случайных сбоев, предельных внешних силовых воздействий и других помех в фазе транспортирования деталей. Номенклатура и число используемых в системе преобразователей определяются типом робота и характером решаемых им задач. Выбор типа преобразователей и места их установки на роботе зависит от используемой схемы контроля и управления.
Опыт эксплуатации Г1Р позволяет условно разбить все возникающие сбои и отказы на несколько видов: отдельные механизмы роботов доходят до своих кинематических ограничений; захватное устройство «натыкается» на деталь либо на отдельные части обслуживаемого им оборудования; робот пытается переместить деталь. не совершив необходимых предварительных движений по обходу препятствий.
В нервом случае для предотвращения поломок ПР используются конечные выключатели, располагаемые в начале и конце каждой траектории движения, ограничивая максимально и минимально возможные перемещения роботов.
В остальных случаях аварийная блокировка осуществляется на основании анализа скоростей перемещения отдельных подвижных механизмов робота и сравнения их с программными. В том случае, когда препятствие не приводит к заметному изменению скорости движения робота, блокировка осуществляется на основании анализа сигналов либо тактильных преобразователей контактного типа, располагаемых на наружных поверхностях захвата роботов, либо силовых преобразователей, располагаемых на отдельных звеньях роботов.
Помимо контроля механической системы робота система аварийной блокировки должна включать блокировку при нарушении работоспособности систем числового программного управления и электроавтоматики.
Система обеспечения техники безопасности. Предназначена для формирования сигналов на остановку движения роботов в опасной для здоровья оператора зоне и при возникновении различных аварийных ситуаций. В качестве устройств, выдающих информацию об аварийной ситуации, используются контактные, силовые, индукционные, ультразвуковые и другие первичные преобразователи.
Контрольные вопросы и задания
-
Как классифицируются системы управления?
-
Расскажите о технических возможностях и назначении унифицированных систем управления типа УЦМ.
-
Какие технические возможности обеспечивают унифицированные системы управления типа УПМ?
-
Расскажите о технических возможностях унифицированных систем управления типа У КМ.
-
Где и с какой целью используются комбинированные системы управления?
-
Как классифицируются информационные системы?
-
Опишите технические возможности визуальных систем.
-
Расскажите о технических возможностях локационных систем.
-
Какие первичные преобразователи применяются в локационных систе* мах? Дайте им сравнительную характеристику.
-
Опишите технические возможности систем искусственного осязания.
-
Расскажите о видах и назначениях систем контроля состояния промышленных роботов.
-
С какой целью применяются системы техники безопасности роботов?