

Глава 11. Системы автоматики
С ПРОГРАММНЫМ УПРАВЛЕНИЕМ
-
ОБЩИЕ ПРИНЦИПЫ ПОСТРОЕНИЯ СИСТЕМ
Под управлением понимают совокупность действий, выработанных на основании определенной информации и направленных на поддержание или улучшение функционирования объекта в соответствии с заданной программой.
Система с программным управлением состоит из последовательно соединенных элементов. Задающее устройство в соответствии с установленным режимом технологического процесса (программой) посылает сигнал, соответствующий началу отсчета (процесса). Сигнал передается на управляющее устройство, в которое в общем случае входят усилительный, преобразующий и исполнительный элементы. Системы могут состоять из одной цепи последовательно соединенных элементов или из нескольких параллельных цепей, управляемых одним многопозиционным задающим программным устройством.
Системы автоматического программного управления классифицируют по степени централизации и по виду программоносителя.
По степени централизации эти системы можно разделить на централизованные, децентрализованные и смешанные.
В централизованных программных системах управления координация действий механизмов какого-либо автомата производится из командного центра и осуществляется по единой программе.
Наиболее часто встречающиеся централизованные системы управления имеют в своей основе командоаппараты, предназначенные для двухпозиционного управления (включение-выключение) по заданной программе. Программа определяет последовательность переключений и время их срабатывания, которое задается длительностью цикла т„ и циклограммой (рис. 97), показывающей относительное расположение моментов включения и выключения цепей в пределах одного цикла.
Централизованные системы осуществляют управление механизмами во времени, причем время одного оборота распределительного вала командоаппарата соответствует длительности одного цикла.
Существуют две разновидности схем централизованного программного управления: без контроля и с контролем выполнения команд. Первые проще в исполнении, однако вторые обеспечивают более высокую надежность в работе. Контроль выполнения команды обычно осуществляется с помощью путевого (конечного) выключателя, сигнал которого используется для остановки механизма.
1,0
X/Тц
0,5
Рис.
97. Циклограмма толкателя:
I
— рабочий ход; 2
— холостой ход
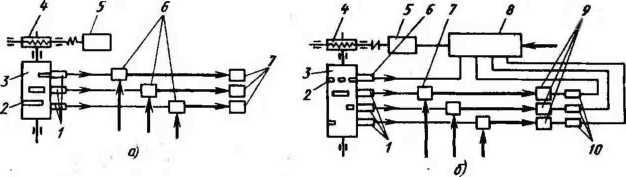
На рис. 98, б приведена схема централизованного программного управления с контролем выполнения команд. Барабан командоаппарата 3 поворачивается на угол, соответствующий интервалу времени между двумя следующими друг за другом командами. Это достигается с помощью особых кулачков 2 и путевого выключателя 6, воздействующего на магнитный пускатель 8 привода 5 командоаппарата, который вращает его барабан 3 через редуктор 4. Первая команда, полученная от управляющего контакта 1, поступает на магнитный пускатель 7 и привод механизма 9. Приведенный в движение механизм перемещает свой рабочий орган. В его предельном положении с помощью путевого переключателя 10 сигнал будет передан на магнитный пускатель 8, который включит двигатель командоаппарата, и т. д.
Системы централизованного управления имеют следующие недостатки: подача команд с центрального командоаппарата осуществляется вне зависимости от положения исполнительных
Рис.
98.
Структурные схемы централизованных
систем управления-
а
— без контроля результатов; б
— с контролем результатов
механизмов и без учета полного выполнения предыдущего цикла, в связи с чем возникает необходимость иметь дополнительные блокировочные устройства.
централизованной
программной системы управления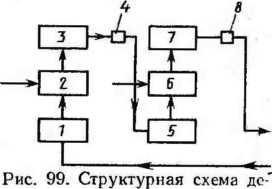
Децентрализованные программные системы управления не имеют командного центра, орган управления в них рассредоточен по механизмам и соединен между собой механической или электрической связью. Работа механизмов может быть функцией времени, пути или технологических параметров. При функционировании механизмов в зависимости от времени отсчет времени каждой операции осуществляется самостоятельным прибором (реле времени). Такая система отличается от централизованной с непрерывно вращающимся валом только тем, что длительности отдельных операций независимы и их можно быстро и просто изменять (при изменении технологических процессов) путем перестройки реле времени.
При функционировании механизмов в зависимости от пути подача каждой последующей команды осуществляется с помощью путевых выключателей, которые контролируют окончание перемещения рабочего органа механизма, участвующего в предыдущей операции.
В децентрализованных системах программного управления при действии механизмов в функции технологических параметров (температуры, давления, свойств и т. п.) используется зависимость различных физических свойств материалов обрабатываемых изделий от различных технологических факторов. Так, например, подача сигнала выгрузки формовочной смеси из бегунов или нагретых изделий из печи может быть осуществлена измерением электрических параметров или температуры.
Децентрализованные системы программного управления, в которых работа механизмов является функцией пути, широко распространены в литейных и термических цехах, так как они надежны в эксплуатации, просты по устройству и достаточно манев- ренны, если при переналадке оборудования меняется только время, но не меняется порядок движения рабочих органов. При изменении порядка движения рабочих органов требуется создание новой системы управления.
В схеме децентрализованной программной системы (рис. 99) реле времени 1 задает темп работы механизмов. Сигнал этого реле поступает на магнитный пускатель 2 электропривода механизма 3. После завершения работы этого механизма срабатывает путевой выключатель 4, который передает сигнал на реле времени 5 последующего механизма. Если второй механизм начинает свою работу сразу после окончания первой операции, то реле времени 5 может быть исключено, и тогда сигнал с путевого выключателя 4 непосредственно поступает на магнитный пускатель 6 электропривода механизма 7. Путевой выключатель 8 подает сигнал на реле времени последующего механизма. В рассмотренной системе сигнал передается последовательно от одного механизма к другому, причем сигнал от последнего механизма возвращается на реле времени 1. Таким образом, при децентрализованных системах управляющие функции поочередно выполняют механизмы — объекты управления, передавая друг другу замкнутую «эстафету управления» посредством входных и выходных сигналов. Здесь основную роль играют автономные и полностью независимые подсистемы управления отдельными механизмами.
Преимуществом этой системы управления является отсутствие блокировки (так как команды на начало работы подаются только после окончания предыдущей операции), а недостатком — то, что многочисленные первичные преобразователи, работающие в рабочей зоне, нередко выходят из строя вследствие попадания брызг жидкого металла, пыли и масла; кроме того, из-за закорачивания или обрыва электрических цепей могут подаваться неправильные команды.
Смешанные программные системы управления содержат ко- мандоаппарат, а также устройство параллельного контроля исполнения очередных команд. При нормальном протекании цикла вал командоаппарата вращается непрерывно, однако, если очередная команда не будет выполнена, то он останавливается. Несмотря на то, что смешанные системы обладают некоторыми недостатками двух систем, они имеют большие перспективы, как более гибкие и универсальные.
По виду программоносителя, т. е. устройства, содержащего законы движения управляемых механизмов, системы управления бывают: с распределительным валом (командоаппаратом); с упорами и копирами; с числовым программным управлением. В последней системе программа может быть записана на перфолентах, магнитных лентах, дисках и картах.
В настоящее время создана теория электрических схем, элементы которой будут изложены в последующих параграфах. Эта теория позволяет разрабатывать научные и практические приемы построения схем и их анализа и из множества вариантов схем выбирать наиболее оптимальный. Существуют два метода разработки схем управления: интуитивный и аналитический. При использовании как первого, так и второго за основу берется анализ работы механизма, схему управления которым необходимо разработать.
-
ИНТУИТИВНЫЙ МЕТОД РАЗРАБОТКИ СХЕМ УПРАВЛЕНИЯ
Интуитивный метод — метод разработки схем управления, основанный на опыте, накопленном в различных проектных организациях при автоматизации разнообразных механиз-
мов. Он базируется на инженерной интуиции проектанта. В совершенстве владеть этим методом может только тот, кто впитал в себя весь предыдущий опыт и имеет определенные способности в отношении составления схем, кто может абстрактно мыслить и логично рассуждать. Однако, несмотря на его сложность, большинство разработчиков схем широко использует интуитивный метод.
Для примера рассмотрим упрощенную кинематическую схему рычажного толкателя (рис. 100). При вращении колеса 5 по часовой стрелке рычаг 4 поворачивает рычаг 1 вокруг оси О, заставляя тем самым башмак 3 с помощью рычага 2 совершать поступательное движение. При дальнейшем вращении колеса 5 изменяется направление движения рычага /, и башмак возвращается в исходное положение, после чего двигатель должен остановиться. Рассмотренный механизм является типичным представителем двухтактного устройства. В первом такте механизм включен и работает. Во втором такте он не работает. Такт, в котором механизм не работает, называют нулевым. Хотя башмак полностью совершает возвратно-поступательное движение (вперед-назад), для привода можно использовать нереверсивный электродвигатель.
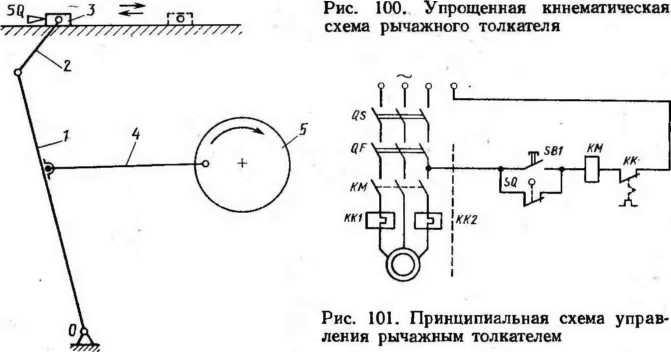
Схема управления электродвигателем рычажного толкателя (рис. 10.1) состоит из двух частей (на рис. 101 они разделены штриховой линией): силовой схемы и схемы управления.
Рассмотрим назначение элементов силовой цепи. Трехфазный ток поступает на выключатель ОБ, обеспечивающий отключение питания электродвигателя в случае ремонта или выхода из строя магнитного пускателя. Далее ток проходит через автоматический выключатель, расцепитель С?/7 которого показан на схеме. Он предназначен для защиты и отключения питания привода при токах короткого замыкания. Главные контакты магнитного пускателя КМ включают или отключают обмотку электродвигателя М.
Тепловые реле КК1 и КК2, нагревательные элементы которых показаны в силовых цепях, предназначены для защиты электродвигателя от длительных перегрузок.'
Схема управления работает следующим образом. При нажатии на пусковую кнопку 5В/ возбуждается катушка магнитного пускателя КМ и, следовательно, замыкаются контакты КМ силовой цепи, и в обмотку двигателя поступает электрический ток. Ротор двигателя приводится1 во вращение, и башмак толкателя начинает свое движение вперед. При этом он отходит от рычага конечного выключателя Б(2, и контакты его замыкаются. Когда пусковая кнопка БВ1 будет отпущена и ее контакты разомкнутся, катушка КМ магнитного пускателя будет получать питание электрическим током через контакты конечного выключателя БС}. Совершив движение вперед и затем назад, башмак толкателя нажмет на рычаг конечного выключателя 3(2, контакты его разомкнутся, и катушка КМ обесточится. Это приведет к размыканию контактов КМ в силовой це'пи и остановке электродвигателя.
Рассмотренная схема содержит силовые цепи и цепи управления. В дальнейшем будут рассматриваться только схемы управления. 1
По функции, т. е. по назначению, Все элементы, участвующие в работе схемы, можно разделить на +ри группы: управляющие контакты, промежуточные элементы й: исполнительные элементы.
Управляющими контактами называются элементы, с помощью которых подаются команды (кнопки управления, переключатели, конечные выключатели, первичные преобразователи, контакты реле и др.).
Само название промежуточные элёменты говорит о том, что они занимают промежуточное положение между управляющими и исполнительными элементами. В релейно-контактных схемах к ним относятся реле времени и промежуточные реле, а в бесконтактных схемах — логические элементы.
Исполнительные элементы — это исполнительные механизмы. Однако при разработке схем управления используются не сами исполнительные механизмы (электродвигатели или нагревательные элементы), а включающие их устройства, т. е. магнитные пускатели, контакторы и т. п.
Все управляющие контакты по их функциональному принципу делятся на пять видов: пусковой контакт кратковременного действия (ПК); пусковой контакт длительного действия (ПД); остановочный контакт кратковременного действия (ОК); остановочный контакт длительного действия (ОД); контакт пуск — остановка (ПО). Эти контакты называют основными.
Циклограммы работы всех типовых контактов при управлении циклическими механизмами приведены на рис. 102. Каждый из пяти контактов начинает работу (замыкаегся) и заканчивает ее (размыкается) в определенные моменты времени. Так, пусковые контакты начинают свою работу вместе с началом рабочего хода,
Рис. 102. Циклограмма работы управляющих контактов
но контакт ПЬС заканчивает свою работу во время рабочего хода, ПД — во время паузы, т. е. они отличаются друг от друга только моментами выключения (размыкания). Остановочные контакты, которые в отличие от пусковых заканчивают свою работу одновременно с концом рабочего хода, различаются моментами включения (замыкания). Остановочный контакт О К начинает свою работу во время рабочего хода, а контакт ОД — в период паузы. Только контакт ПО начинает свою работу вместе с началом рабочего хода и заканчивает с его концом.
С помощью рассмотренных пяти основных контактов можно получить четыре схемы управления исполнительными и промежуточными элементами, которые получили название типовых схем (рис. 103).
Первая типовая схема (рис. 103, а) имеет только один управляющий контакт ПО. Если он замкнут, то через исполнительный элемент X протекает электрический ток, а если разомкнут, то ток отсутствует. Контакт ПО имеет свое самостоятельное значение, а все остальные контакты должны быть использованы парами (пусковой и остановочный).
Вторая типовая схема имеет два управляющих контакта
длительного действия: ПД и ОД (рис. 103, б).
Третья типовая схема состоит из пускового контакта ПК
и остановочного контакта ОД; кроме управляющих контактов
в эту схему обязательно должен быть включен блокировочный контакт х, через который исполнительный элемент X будет продолжать получать питание после размыкания пускового контакта ПК (рис. 103, в).
Ч етвертая
типовая схема базируется на двух
контактах кратковременного действия:
пусковом ПК
и остановочном ОК,
включенных параллельно (рис. 103, г).
етвертая
типовая схема базируется на двух
контактах кратковременного действия:
пусковом ПК
и остановочном ОК,
включенных параллельно (рис. 103, г).
Рис. 103. Типовые схемы управление исполнительными и промежуточными схемами
Приведенные четыре типовые схемы позволяют (как бы из кубиков) составлять сложные параллельно-последовательные контактные схемы управления. Так, например, рассмотренная схема управления рычажным толкателем (см. рис. 101) основана на четвертой типовой схеме. В ней в качестве пускового контакта кратковременного действия используют пусковые кнопки БВ1, а в качестве остановочного контакта кратковременного действия — конечный выключатель Б(2.
При составлении схемы управления интуитивным методом необходимо правильно определить тип управляющего контакта, т. е. длительность его действия.
Рассмотрим пример разработки интуитивным методом схемы управления с помощью типовых схем.
Пусть требуется разработать полуавтомат для управления индуктором и спреерным устройством установки, предназначенной для нагрева изделия токами высокой частоты и последующего его охлаждения струями воды. Время нагрева изделия в индукторе 12 с, а время охлаждения 8 ч. Изделие устанавливают в индуктор вручную.
Сначала проведем анализ работы полуавтомата и определим все исполнительные и промежуточные элементы. Рабочий вручную устанавливает изделие в индуктор и нажимает на пусковую кнопку. В этот момент включается индуктор и начинается нагрев изделия. Одновременно должно включиться и реле времени, отсчитывающее время нагрева (12 с). Это реле времени (точнее, его контакты) выключает индуктор и включает спреерное устройство, подающее воду для закалки. Одновременно должно включиться второе реле, отсчитывающее время охлаждения, т. е. отключающее спреерное устройство. Таким образом, необходимо управлять четырьмя элементами: индуктором, спреерным устройством и двумя реле времени. Индуктор включается и выключается с помощью контактора, следовательно, необходимо управлять последним. Спреерное устройство управляется электромагнитным краном. Обозначим катушку (обмотку) контактора КМ1, катушку электромагнитного крана КМ2, а катушки реле времени соответственно КТ1 и КТ2. Таким образом, мы имеем два исполнительных элемента: КМ1 и К М2, и два промежуточных элемента: КТ1 и КТ2.
Из проведенного анализа следует, что сначала должен начаться нагрев, т. е. возбудится катушка КМ1. В качестве пускового контакта используется пусковая кнопка Б В (кратковременного действия). Таким образом, применима либо третья, либо четвертая типовая схема. Пусть индуктор выключается контактами реле времени КТ 1.1, которые в данном случае являются контактами длительного действия. Поэтому выбираем третью типовую схему. Одновременно с катушкой магнитного пускателя КМ1 необходимо включить реле времени КТ1, что очень просто сделать, соединив их параллельно.
Рис.
104. Схемы управления:
а
— индуктором и реле времени нагрева;
б
— спреериым устройством и реле времена
охлаждения; е
установки в целом
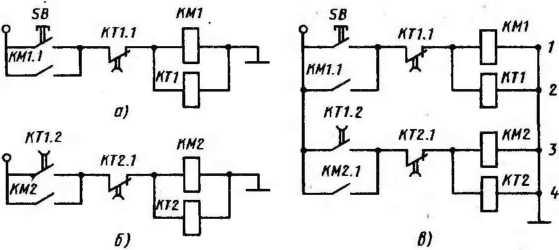
Рассмотрим работу полученной схемы (рис. 104, а). При нажатии на пусковую кнопку 5В возбуждается катушка контактора КМ1, т. е. начинается нагрев изделия. Одновременно возбуждается катушка реле времени КТ1 и начинается отсчет времени нагрева. С помощью блокировочного контакта КМ 1.1 напряжение на катушке КМ1 будет удерживаться и после отпускания пусковой кнопки БВ, т. е. после размыкания ее контактов. По истечении времени нагрева сработает реле времени КТ1, его контакт КТ1.1 разомкнется. Это приведет к обесточиванию катушки КМ1 (нагрев изделия закончится). Теперь необходимо включить спре- ерное устройство. Его включить может реле времени КТ1 путем замыкания контакта. Включив спреерное устройство, реле времени КТ1 отключается. Следовательно, замыкающий контакт КТ 1.1 будет являться контактом кратковременного действия. Поэтому вновь воспользуемся третьей типовой схемой.
Одновременно со спреерным устройством необходимо включить реле времени КТ2, отсчитывающее время охлаждения. Для этой цели воспользуемся примененным приемом и включим катушку реле времени КТ2 параллельно катушке К М2. Таким образом получим вторую схему управления (рис. 104, б). Объединяя две схемы (рис. 104, а и б), получим общую схему управления (рис. 104, в).
Рассмотрим теперь работу схемы в целом (рис. 104, в). При нажатии на пусковую кнопку БВ возбуждаются катушки контактора КМ1 и реле времени КТ1, начинается нагрев изделия. Через 12 с реле времени КТ1 сработает, и его контакты в цепи 1 разомкнутся, а в цепи 2 замкнутся. Начнется процесс охлаждения изделия. Одновременно с катушкой КМ2 электромагнитного крана возбудится реле времени КТ2, отсчитывающее время охлаждения. При размыкании контакта КТ2.1 (цепь 3) кран К М2 и реле времени КТ2 выключаются, и схема возвращается в исходное положение.
Полученная схема управления индуктором и спреерным устройством разработана интуитивным методом. Однако нет никаких доказательств, что эта схема будет верна и оптимальна. Вопрос
о работоспособности схемы можно будет решить только после ее изготовления и тщательной экспериментальной проверки. Именно это является самым большим недостатком интуитивного метода. Отмеченный недостаток отсутствует у аналитического метода.
-
АНАЛИТИЧЕСКИЙ МЕТОД РАЗРАБОТКИ
СХЕМ УПРАВЛЕНИЯ
Аналитический метод появился в сороковые годы, однако он и до настоящего времени не оформился в широко применяемую теорию, что объясняется его сложностью. Аналитический метод базируется на элементах алгебры логики. Поэтому, прежде чем приступить к его изложению, остановимся на некоторых положениях алгебры логики.
Алгебра логики — раздел математической логики, который рассматривает применение математического аппарата к логике. Алгебра логики — алгебр'Ё высказываний, причем под высказыванием понимается любое суждение, предложение или понятие, но с одним условием — оно должно быть в данный момент либо истинным, либо ложным и не может быть одновременно и тем, и другим. Обычно истинному высказыванию приписывается значение единицы (1), а ложному — значение ноль (0).
Переменные в алгебре логики имеют свою специфику. Они обязательно имеют два состояния, одно исключающее другое. Например, «включено—выключено» или «замкнуто—разомкнуто».
Логические действия, с помощью которых простые суждения группируются в сложные, называются функциями алгебры логики.
Наибольшее применение получили функции, входящие в систему логических операций: умножения (конъюнкции), сложения (дизъюнкции) и отрицания (инверсии). С помощью указанных трех операций можно выразить все остальные операции алгебры логики.
Логические умножение и сложение выражаются соответственно точкой (•) и знаком плюс (-)-), а отрицание —■ чертой над символом переменной. Символы переменных изображаются буквами латинского алфавита.
Логическое умножение (конъюнкция) — это функция, соответствующая логической связке И, с помощью которой простые суждения объединяются в сложные. Это сложное суждение ложно (равно нулю), если хотя бы одно из простых суждений ложно. Сложное суждение / (X), определяемое логическим умножением двух простых суждений а и Ь, можно записать в виде
/ (X) - а* Ь.
Рис. 105. Электрические цепи, реализующие операции: а — умножения; б — сложения
При числе простых суждений, равном т, формула логического умножения примет вид
/ (X) — й'Ъ'С ... т.
Электрическая цепь, реализующая логическую операцию И, состоит из последовательно включенных контактов. Ток протекает по этой цепи только в том случае, если замкнуты все контакты, а и Ъ (рис. 105, а).
Логическое сложение (дизъюнкция) — это функция, соответствующая логической связке ИЛИ, с помощью которой простые суждения объединяются в сложные. Новое суждение будет истинно (равно 1), если хотя бы одно из простых суждений истинно. Сложное суждение / (X), определяемое логическим сложением двух простых суждений а и Ь, записывается в виде
/ (X) — а -\-Ь.
При числе простых суждений, равном п, формула логического сложения примет вид
/ (X) — а + Ь + с +... + п.
В электрической схеме функции ИЛИ соответствует параллельное соединение контактов. Ток протекает по этой цепи, если замкнут контакт а или контакт Ь (рис. 105, б).
Логическое отрицание (инверсия) — это функция, соответствующая логической связке НЕ. При этом, если основное суждение ложно (равно нулю), то его логическое отрицание истинно (равно единице), и наоборот. Аналитически логическое отрицание записывается следующим образом:
/ (X) = а.
В электрической цепи функцию логического отрицания может выполнять реле с размыкающимися контактами, которые будут разомкнуты при подаче напряжения на обмотку реле.
В алгебре логики существует целый ряд законов (соотношений), которые отображают тождественные логические функции. Рассмотрим наиболее важные соотношения, которые можно разбить на три группы.
К первой группе относятся соотношения, которые согласуются с правилами обычной алгебры: переместительные законы:
-
а-Ь — Ь-а; 2) а 4- Ь — Ь + щ сочетательные законыз
3) (а-Ь)-с — а (Ь-с)з 4) (о + Ъ) + с = а + (Ь + с); распределительный закон!
Б) (а 4- Ъ)-(с 4- й) — а-с + Ь-с + а-й 4- Ь-й.
Ко второй группе относятся соотношения, не согласующиеся с правилами обычной алгебры: распределительный закон:
6) а-Ь с = (а с)-(Ь 4- с); закон повторения!
7) а-а-а •... •а = а;
8) а + а + а +... + а — а\
действия с константой:
9) а + 1 = 1- 10) 1 + 1 = 1.
В третью группу входят соотношения, не имеющие эквивалентов в обычной алгебре: закон отрицания (инверсии):
-
а-Ь — а + Ь; 12) а + Ъ — а-Ь\ действия с инверсными символами:
13) а-а = 0; 14) а + а = 1;
15) а — а- 16) 0 - 15 17) Т = 0.
Рассмотренный математический аппарат алгебры логики может быть с успехом применен для решения различных задач при проектировании схем управления различными механизмами, так как каждая цепочка схемы может находиться только в двух состояниях: либо проводить электрический ток, либо нет. Рассмотрим пример. Пусть дана математическая модель
/ (X) — а-Ъ-с (6 4- с) (х + Ь -|- с-х).
По этой модели построим схему (рис. 106, а), которая будет иметь девять управляющих элементов. Теперь с помощью законов алгебры логики попытаемся сократить число элементов схемы (операция уменьшения числа элементов носит название минимизация).
![]()
Рис.
106. Схемы математической модели:
а
•— до минимизации; б
— после минимизации
![]()
Сначала рассмотрим первые четыре сомножителя модели и на основании соотношений 5, 7 и 13 запишем:
а-Ь-с(5 -|-с) = а-Ь-с-Б -{- а-Ь-с-с — а-Ь-с.
Затем, используя соотношения 5, 7, 9, 13, окончательно получим:
а-Ь-с (х •+• Ъ 4- с-х) = а-Ь-с-х -+- 4- а-Ь-с-Ь 4- а-Ь-с-с-х =
= а-Ъ-с-х 4- а-Ь-с =
-
а-Ь-с (х 4- 1) — а-Ь-с.
Схема по полученной после минимизации модели представлена на рис. 106, б. Она проще и надежнее, так как содержит всего три управляющих контакта.
Рассмотрим сущность аналитического метода разработки схем управления на примере разработки схемы управления нереверсивным электродвигателем с помощью кнопок управления. В схеме необходимо предусмотреть тепловую защиту электродвигателя. Эта задача решается следующим образом.
-
Проводится анализ * работы установки для определения последовательности включения и выключения ее механизмов и выявления управляющих элементов. Вводятся условные обозначения исполнительных, промежуточных и управляющих элементов. На основе анализа составляется буквенная циклограмма работы установки, которая должна отражать строгую последовательность включения и выключения механизмов.
В рассматриваемом примере правильная схема должна обеспечивать выполнение следующих функций. При нажатии на пусковую кнопку катушка магнитного пускателя возбуждается током. При этом ротор электродвигателя начинает вращаться. Для остановки электродвигателя напряжение с катушки магнитного пускателя должно быть снято. Это может быть достигнуто нажатием на стоповую кнопку (размыканием ее контактов) или размыканием контактов теплового реле, которое срабатывает при длительной перегрузке электродвигателя. Обозначим катушку магнитного пускателя буквой К, пусковую кнопку — буквой Е, стоповую кнопку — буквой 5 и контакты теплового реле — буквой С. Тогда буквенная циклограмма будет иметь вид
О + Е + К — Е + М —К — М,
где О — нулевой такт; М = S + С, ибо катушка К магнитного пускателя может быть обесточена стоповой кнопкой (ее контактами) или контактами теплового реле С.
-
На буквенной циклограмме определяются периоды включения (ПВ) и включающие периоды (ВП) исполнительных и промежуточных элементов. Периоду ПВ соответствует интервал от момента включения (пуска) элемента до момента его выключения (остановки), т. е. на буквенной циклограмме от знака плюс до знака минус элемента. Период ВП сдвинут относительно ПВ на один такт влево.
Определяем ПВ и ВП исполнительного элемента К на циклограмме. Других исполнительных и промежуточных элементов нет.
ПВ
0 + Е +К--Е + М — К —М.
-
__
-
Составляется первичная математическая модель для каждого исполнительного или промежуточного элемента. Она представляет собой произведение двух элементов циклограммы: включающего (пускового) а и выключающего (остановочного) Ь, взятого со знаком инверсии, т. е.
f (X) = а-Б,
где X —■ исполнительный или промежуточный элемент. На циклограмме исполнительный элемент после включающего элемента стоит со знаком плюс, а после выключающего — со знаком минус. Если включающий контакт находится, в циклограмме со знаком минус, то в модель его записывают со знаком инверсии. Наличие знака минус у выключающего контакта приводит к тому, что в модели знак инверсии отсутствует.
Записываем первичную математическую модель для исполнительного элемента К, где / (К) = е-т; е — включающий элемент, т — выключающий.
-
Проводят три проверки составленной первичной модели. Цель первой проверки заключается в том, что исследуется природа включающего элемента на длительность включения. Включающий элемент является элементом длительного действия, если он не меняет своего знака во включающем периоде, и наоборот, кратковременного действия, когда меняет свой знак. Если в результате первой проверки будет установлено, что включающий элемент является элементом кратковременного действия, то первичную модель корректируют введением в нее самоблокировки, т. е. блокируют включающий элемент исполнительным или промежуточным элементом. Тогда скорректированная модель будет иметь вид
f(X) =(а + х)-6, где х —- блокировочный элемент.
В примере включающий элемент Е меняет свой знак во включающем периоде, следовательно, он является элементом кратковременного действия. Модель после корректировки будет иметь вид
/ (К) = (е + 1г)-т.
Суть второй проверки сводится к определению длительности действия выключающего элемента. Если выключающий элемент меняет свой знак в периоде включения, то он является элементом кратковременного действия, а если не меняет, то элемент длительного действия. Если в результате второй проверки будет установлена кратковременность действия выключающего элемента, то следует провести корректировку математической модели, полученной по результатам первой проверки. Корректировка осуществляется продлением действия выключающего элемента существующим элементом циклограмм либо вновь введенным. Скорректированная модель будет иметь вид
основы 1
АВТОМАТИЗАЦИИ ПРОИЗВОДСТВА 1
ЭЛЕМЕНТЫ АВТОМАТИКИ 5
43- 47
-ЕЬ 47
=ЕЬ 47
^-04 ж 47
—СИ 48
если проводилась.
В примере выключающий элемент не меняет своего знака во включающем периоде, следовательно, он является элементом длительного действия, и модель, полученная по результатам первой проверки, остается без изменений, т. е. / (/С) = (е + /г)-т.
Третья проверка осуществляется для выявления ложных включений исследуемого элемента X во всей циклограмме. Сначала модель, полученная по результатам второй проверки, представляется в виде суммы слагаемых (если это возможно). Затем определяется значение суммарного весового коэффициента К0 для каждого из слагаемых математической модели или для модели в целом (если она не может быть представлена в виде суммы слагаемых). Для этого каждому элементу слагаемого (или модели) присваивается свой весовой коэффициент. Первому элементу присваивается значение весового коэффициента 2°, второму — 21, третьему — 22, четвертому — 23 й т. д. Сумма этих коэффициентов равна значению суммарного весового коэффициента Кс. Однако следует помнить, что при суммировании весовые коэффициенты элементов, стоящие в модели со знаком инверсии, в сумму не входят.
В примере модель / (К) — {е + к)-т можно представить в виде слагаемых, т. е. / (К) — (е + /г)■ т = е-т + к т. Присвоим весовые коэффициенты элементам каждого слагаемого:
![]() е
т и &
т
2°; 21
2°; 21.
е
т и &
т
2°; 21
2°; 21.
Рис. 107. Схема управления нереверсивным электродвигателем
Тогда суммарный коэффициент для каждого слагаемого будет равен единице, т. е, Кс — 1. так элемент т имеет знак инверсии.
Теперь необходимо записать ряд весовых коэффициентов циклограммы для каждого слагаемого (или модели в целом). Коэффициенты пишут под каждой буквой циклограммы. Значение первого коэффициента зависит от того, с каким знаком приходят включающие и выключающие элементы к концу циклограммы, т. е. включенными или выключенными. Если они выключены, то в сумму первого коэффициента идет нуль и ряд начинается с нуля, а если включен хотя бы один, то в сумму идет значение коэффициента этого элемента. Получим:
О + Е + К —ЕЛ- М—К — М
е-т 0 1 1 0 2 2 0
к-т 0 0 1 1 3 2 0
Значение суммарного весового коэффициента Кс должно встречаться только во включающем периоде. Наличие его в других тактах указывает на то, что там существуют ложные включения и математическая модель требует корректировки.
В примере значение суммарного весового коэффициента, равное единице, встречается только во включающем периоде. Следовательно, ложных включений элемента К нет, и модель не требует корректировки.
Корректировку математической модели по результатам третьей проверки проводят «опоясыванием» (блокированием) тактов, в которых встречаются ложные включения, или рабочих тактов. Если «опоясывают» ложные включения каким-либо элементом Р, то математическую модель, полученную по результатам второй проверки, следует умножить на р со знаком инверсии, т. е.
/(X) = (а + х)-б -р;
если «опоясывают» рабочие такты, то модель умножают на р без знака инверсии, т. е.
ИХ) — (а + х)-б-р.
В качестве «опоясывающего» элемента может быть использован какой-либо элемент циклограммы, который включается до начала рабочих тактов (или ложных включений) и выключается после окончания рабочих тактов. Сформулированное правило касается и вновь введенных элементов.
Если для корректировки математической модели элемента X вводится новый элемент, то он по своей функции является промежуточным элементом, и для него необходимо проводить математическое моделирование. Поэтому всегда необходимо стремиться к тому, чтобы в первую очередь использовать элемент* уже имеющийся в циклограмме, и только при отсутствии необходимого элемента вводить новый.
-
Составляется обобщенная модель, которая представляет собой сумму математических моделей всех исполнительных и промежуточных элементов, каждая из которых умножена на соответствующий исполнительный или промежуточный элемент.
В примере один исполнительный элемент, поэтому обобщенная математическая модель будет иметь вид
=(е + Щ-т-К = (е + + С).к =
= (<? + £) я-с /С.
-
Проводят минимизацию обобщенной модели и по минимизированной модели строят электрическую схему. При этом исходят из того, что знак умножения соответствует последовательному соединению элементов, а знак сложения — параллельному. Все элементы математической модели без знака инверсии эквивалентны замыкающим контактам, а со знаком инверсии — размыкающим.
Схема управления, рассмотренная в примере, приведена на рис. 107.
Контрольные вопросы и задания
-
Расскажите о классификации систем автоматического программного управления.
-
Как осуществляется управление в функции времени?
-
Как осуществляется управление в функции пути?
-
Расскажите о типовых пусковых контактах и дайте их характеристику.
Б. Расскажите об интуитивном методе построения схем управления.
-
Расскажите об аналитическом методе схем управления.
-
Расскажите о действиях алгебры логики.
-
Расскажите о законах алгебры логики.
-
Изложите последовательность разработки схем аналитическим методом.
-
В чем заключается суть первой проверки математической модели, и как она проводится?
-
В чем заключается суть второй проверки, и как она проводится?
-
В чем заключается суть третьей проверки, и как она проводится?