

Глава 15. Объекты регулирования и их свойства
-
ОБЩИЕ СВЕДЕНИЯ
Объект регулирования является основной частью системы автоматического регулирования, свойства которого оказывают влияние на качество регулирования и выбор типа регулятора.
К наиболее распространенным объектам регулирования в литейных и термических цехах относятся тепловые устройства (плавильные, нагревательные и сушильные печи), в которых требуется регулировать температуру, расход воздуха, топлива или электрической энергии; установки по приготовлению формовых и стержневых смесей; установки для получения контролируемых атмосфер, где необходимо регулировать одновременно температуру, влажность или состав газовой фазы, и т. д.
Любой объект регулирования характеризуется количеством энергии или вещества, проходящего через него. Режим работы объекта определяется протекающими внутренними процессами, на характер которых влияют внешние воздействия. В системе автоматического регулирования часть внешних воздействий дает ей информацию о задачах регулирования. Поэтому их называют полезными (регулирующими) воздействиями. Они либо вырабатываются регулятором, либо задаются оператором. Воздействия на объект, не связанные с задачей регулирования, называют возмущениями. Именно из-за существования возмущений возникает необходимость регулирования. Природа возмущений всегда носит случайный характер. Например, это может быть понижение температуры нагревательной или плавильной печей из-за случайного открытия дверки, увеличение запыленности воздуха из-за открытия въездных ворот и т. п.
Если объект имеет одну регулируемую величину, то он относится к простым, или одномерным-, при наличии нескольких регулируемых величин его называют многомерным.
Различают два вида объектов регулирования: стационарные, у которых характеристики не изменяются во времени или изменяются незначительно, и нестационарные, характеристики которых изменяются во времени.
В качестве примера объекта регулирования рассмотрим лабораторную нагревательную печь, у которой регулируемой величиной является температура рабочего пространства. К числу внешних возмущений этого объекта относится масса загруженных образцов, частота открытия загрузочной дверки, колебания напряжения электропечи.
Следовательно, объект регулирования — это устройство, заданный режим которого должен поддерживаться регулирующими воздействиями регулятора извне. Для создания системы регулирования необходимы четкие представления о свойствах объекта. Знание этих свойств необходимо также и для выбора технических средств измерения контролируемых и регулируемых величин, элементов регуляторов и их настроек.
-
ПАРАМЕТРЫ ОБЪЕКТОВ РЕГУЛИРОВАНИЯ
К основным параметрам, определяющим свойства объектов регулирования, относятся: нагрузка, емкость, самовырав- н'ивание, инерционность и запаздывание, время разгона и постоянная времени объекта.
Нагрузка. Любой объект регулирования характеризуется нагрузкой, т. е. количеством энергии или вещества, которое расходуется в этом объекте для проведения заданного технологического процесса, например количеством топлива, подаваемого К горелкам печей, количеством электроэнергии, подводимой к электродам дуговых плавильных печей, и т. п.
Нагрузка характеризует производительность или пропускную способность объекта при установившемся состоянии контролируемого процесса.
Значительные колебания нагрузки вызывают изменения регулируемой величины. Однако для процесса регулирования имеет значение не абсолютное значение нагрузки, а.диапазон и характер ее изменения во времени. Чем медленнее изменяется нагрузка и ■ чем меньше ее диапазон, тем легче регулировать объект, и наоборот.
Емкость. Подавляющее большинство видов оборудования литейных и термических цехов (плавильные и нагревательные печи, охлаждающие баки, сушильные установки и т. д.) способны накапливать (аккумулировать) энергию и вещество. Такое накопление возможно благодаря тому, что в каждом объекте имеется сопротивление выходу энергии и вещества (кладка печи, заслонка и шибер и т. д.).
Емкостью регулируемого объекта называют запас накопленной энергии или вещества. Так, например, при. регулировании температуры плавильной печи ее емкость по отношению к регулируемой величине (температуре) будет характеризоваться количеством тепла, накопленном в кладке, в жидком металле и в газах, заполняющих рабочее пространство печи.
Емкость объекта зависит от его размеров. Так, например, при регулировании уровня жидкости в закалочном баке емкость объекта зависит от вместимости бака. Чем больше вместимость бака, тем медленнее будет изменяться уровень при нарушении соответствия между приходом и расходом жидкости. В объекте с большей емкостью регулируемая величина при возмущении медленнее изменяет свое значение, и регулирование протекает более устойчиво.
Однако понятие емкости не позволяет правильно оценить ее влияние на изменение регулируемой величины, поэтому вводят понятие о коэффициенте емкости.
Коэффициент емкости — это количество энергии или вещества, которое необходимо подвести в объект или отвести от объекта, с тем чтобы изменить регулируемую величину на единицу времени. Например, при регулировании уровня жидкости в закалочном баке коэффициент емкости — это количество жидкости, которое необходимо добавить в бак, чтобы уровень жидкости изменился на единицу измерения.
Чем больше коэффициент емкости, тем больше емкость объекта, тем медленнее изменяется регулируемая величина, т. е. меньше чувствительность объекта К возмущениям, и наоборот.
В общем виде коэффициент емкости К с можно представить как отношение емкости объекта С к значению регулируемой величины X:
Ко = С/Х.
Коэффициент емкости может быть постоянной или переменной величиной; в последнем случае коэффициент емкости определяют как отношение изменения емкости к соответствующему изменению регулируемой величины:
Ко = АС/АХ.
Величину, обратную коэффициенту емкости, называют чувствительностью объекта к возмущению.
Различают безъемкостные, одноемкостные и многоемкостные объекты.
К безъемкостным объектам относят объекты с очень малой вместимостью (например, небольшие трубопроводы).
Одноемкостные объекты — такие объекты, у которых нарушение равновесия между подачей и потреблением вызывает одновременные и одинаковые изменения регулируемой величины во всех точках емкости.
Многоемкостные объекты — это те объекты, в которых имеются две или более емкостей, разделенных между собой термическими, гидравлическими или электрическими сопротивлениями.
Примером двухъемкостного объекта может служить термическая печь, у которой одна емкость — рабочее пространство — отделена от второй (где находятся нагревательные элементы) термическим сопротивлением (металлическим муфелем). Другим примером двухъемкостного объекта является, тигельная плавильная печь.
Многоемкостные объекты сложно регулировать, так как они характеризуются так называемым переходным запаздыванием, о чем будет сказано ниже.
Самовыравнивание. Большинство объектов регулирования в литейных и термических цехах обладает свойством самовырав- нивания: при внешних возмущениях самостоятельно (без участия регулятора) входить в новый статический режим работы. Таким образом, в объектах с самовыравниванием возникшее несоответствие между приходом и расходом энергии (или вещества) стремится к нулю, а регулируемая величина — к новому установившемуся значению. Например, если к нагревательным элементам электрической печи будет подводиться меиьшее напряжение, то температура в ней будет понижаться и стремиться к новому установившемуся значению.
Объекты, обладающие свойством самовыравнивания, называют статическими объектами.
В ряде объектов регулирования нарушение равновесия между подачей и потреблением энергии (или вещества) приводит к непрерывному изменению регулируемой величины в ту или иную сторону. Объекты регулирования, лишенные самовыравнивания, называют астатическими объектами. Примером такого объекта может служить закалочный бак, в который жидкость поступает из трубы, а отводится с помощью насоса. При увеличении подачи жидкости в бак количество отводимой жидкости останется прежним. В результате уровень жидкости будет повышаться, и бак через некоторое время переполнится. Только ручное и автоматическое изменение производительности насоса может привести к восстановлению равновесия и предотвратить переполнение бака.
Регулирование в объектах без самовыравнивания сопряжено с преодолением ряда трудностей, а в отдельных случаях регулирование просто невозможно.
Способность объекта к самовыравниванию характеризуется степенью самовыравнивания р:
р = <1д/с1Х0,
где ц — относительная разность между приходом и расходом вещества или энергии; Х0 — Х/Хн — относительное отклонение регулируемой величины; Х„ — номинальное значение регулируемой величины; X — текущее значение регулируемой величины.
Степень самовыравнивания численно равна отношению возмущающего воздействия к отклонению регулируемой величины, вызванному этим воздействием. Чем больше степень самовыравнивания р, тем с большей легкостью объект самопроизвольно восстановит заданное значение величины при кратковременном возмущении и тем быстрее восстановится равновесие и более устойчивым будет процесс регулирования. С увеличением степени са- мовыравнивания уменьшается время переходного периода в процессе регулирования, т. е. повышается его качество.
Однако степень самовыравнивания объекта не является постоянной, она зависит от нагрузки. С уменьшением нагрузки уменьшается степень самовыравнивания, что затрудняет проведение устойчивого и качественного регулирования.
Инерционность и запаздывание. Большинству объектов регулирования в той или иной степени присущи инерционность и запаздывание. Инерционность объекта характеризует его способность к замедлению накапливать или расходовать энергию (или вещество) в результате наличия сопротивлений. В таком объекте в результате регулирующего воздействия и нарушения равновесия между приходом и расходом энергии (или вещества) регулируемая величина изменяется не мгновенно. Отставание регулируемой величины называется запаздыванием.
Время полного запаздывания тп складывается из двух составляющих: времени транспортного (или чистого) запаздывания тт и времени емкостного (или инерционного) запаздывания те.
Транспортное запаздывание — это время, в течение которого регулируемая величина не изменяется, несмотря на произведенное регулирующее воздействие. Например, при изменении напряжения на нагревательных элементах электрической печи потребуется определенное время, пока установится новый тепловой поток, что повлияет в конечном итоге на время начала изменения температуры.
Продолжительность транспортного запаздывания зависит от расстояния между регулирующим органом и чувствительном элементом первичного преобразователя, от нагрузки и емкости объекта. Например, транспортное запаздывание уменьшается при расположении термопары в непосредственной близости от нагревательных элементов. Чем больше нагрузка, тем меньше транспортное запаздывание, а чем больше емкость объекта, тем больше время транспортного запаздывания. Такое запаздывание затрудняет регулирование, и следует всегда стремиться к его уменьшению.
Емкостным запаздыванием называется запаздывание, зависящее от термических, гидравлических и других сопротивлений между емкостями объекта. Оно определяется как интервал времени, затраченный на преодоление межъемкостных сопротивлений. Например, в муфельной печи емкостным запаздыванием будет время с момента возникновения теплового потока от нагревательных элементов до момента изменения температуры муфеля.
 Е
Е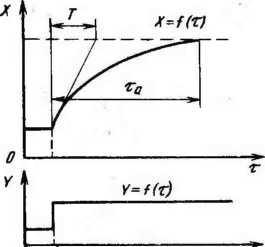 мкостное
запаздывание тем больше, чем больше
число последовательно включенных
емкостей и чем больше их значения.
мкостное
запаздывание тем больше, чем больше
число последовательно включенных
емкостей и чем больше их значения.
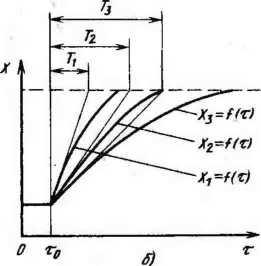
Рис. 126. Кривые разгона объектов:
а — одноемкостного объекта; б — многоемкостных объектов
Емкостное запаздывание отрицательно сказывается на качестве регулирования.
Многоемкостные объекты обладают транспортным и емкостным запаздыванием, одноемкостные — только транспортным.
Однако свойством запаздывания обладают не только объекты регулирования, но и сами регуляторы. Запаздывание регулятора — суммарное время запаздывания измерительной и регулирующей систем.
Запаздывание чувствительных элементов регулятора определяется тем временем, которое необходимо чувствительному элементу первичного преобразователя для обнаружения в объекте изменения регулируемой величины после возмущения.
Запаздывание в регуляторе включает также время, необходимое для преодоления различных зазоров, срабатывания про* межуточных реле, исполнительного механизма и регулирующего органа, преодоления сил трения и т. п. Время преодоления зазоров в механических устройствах исполнительного механизма называют запаздыванием корректировки.
Запаздывание регулятора вызывает выбег регулирующего органа и, как следствие этого, отклонение регулируемой величины. Процесс успокоения затягивается, что ухудшает качество регулирования. Особенно опасно влияние запаздывания, если объект не обладает самовыравниванием.
Время запаздывания регулятора может быть уменьшено за счет применения соответствующей настройки исполнительного механизма и уменьшения времени срабатывания регулирующего органа.
Время разгона и постоянная времени объекта. Временем разгона объекта регулирования называют время, в течение которого регулируемая величина изменяется от нуля до заданного значения при мгновенном 100 %-ном изменении регулирующего воздействия и постоянстве его действия. Для объяснения этого понятия лучше всего рассмотреть кривую разгона, которая показывает изменение регулируемой величины во времени. Такую кривую можно получить, если скачкообразно изменить регулирующее воздействие и записать изменение регулируемой величины для различных моментов времени.
На рис. 126, о изображена кривая разгона X = [ (т) объекта с самовыравниванием, которая показывает изменение значения регулируемой величины при мгновенном изменении регулирующего воздействия У. Время разгона та определяется продолжительностью переходного процесса от момента подачи регулирующего воздействия до момента достижения регулируемой величиной максимального значения. Максимальное значение регулируемой величины отличается от установившегося значения не более чем на 1 %.
Время разгона является мерой инерционности объекта. Оно возрастает с увеличением емкости объекта.
Постоянная времени объекта — это время его разгона при отсутствии самовыравнивания. Значение постоянной времени Т объекта можно определить, если провести касательную к начальной точке кривой разгона (рис. 126, а). Отрезок, отсекаемый этой касательной на прямой, параллельной оси абсцисс, представляет собой постоянную времени объекта Т.
Время разгона та и постоянная времени объекта Т связаны между собой соотношением та = т)Т, где г) — коэффициент нагрузки объекта, который равен отношению нагрузки объекта при рассматриваемом режиме к максимальной .нагрузке.
Постоянная времени объекта Т связана с чувствительностью V и степенью самовыравнивания р соотношением Т — 1/^р).
На рис. 126, б показаны кривые разгона, объектов с различным числом емкостей. Значения постоянных времени различных объектов неодинаковы. С увеличением числа емкостей увеличивается постоянная времени объекта. А чем она больше, тем хуже поддается объект регулированию.
-
ОПРЕДЕЛЕНИЕ ОСНОВНЫХ СВОЙСТВ ОБЪЕКТОВ
Для определения основных свойств объектов используются следующие методы: мегод переходных характеристик (кривых разгона); метод импульсных возмущений (прямоугольного волнового импульса); частотный метод; метод прямоугольной волны; статический метод.
Все перечисленные методы, кроме последнего, основаны на изучении поведения объекта при различного вида возмущений'^*
 Наиболее
широко применяется метод переходных
характеристик (кривых разгона). После
соответствующего анализа и обработки
кривой разгона (рис. 127) можно определить
время запаздывания и природу его
происхождения, т. е. тт, те,
и полное запаздывание тп; время
разгона та и постоянную времени
объекта Т\
степень
самовыравнивания р; скорость разгона
е.
Наиболее
широко применяется метод переходных
характеристик (кривых разгона). После
соответствующего анализа и обработки
кривой разгона (рис. 127) можно определить
время запаздывания и природу его
происхождения, т. е. тт, те,
и полное запаздывание тп; время
разгона та и постоянную времени
объекта Т\
степень
самовыравнивания р; скорость разгона
е.
Рис. 127. Кривая разгона для определения свойств объекта
Времени транспортного запаздывания тт на кривой разгона соответствует отрезок Ьс между временем возмущения То и моментом изменения регулируемой величины.
Для определения времени емкостного запаздывания проводят линию ас начального значения регулируемой величины и находят точку максимальной скорости ее изменения (точка перегиба ц, после которой скорость снижается).
Через точку £ проводят касательную до пересечения ее с линией ас; полеченный шре- збК ей и есть время емкостного запаздывания те.
На основании найденных значений хт и ^ определяют время полного запаздывания тц = тт + те.
Время разгона та — время между моментом внесения возмущения и моментом достижения регулируемой величиной максимального значения.
' Чтобы определить постоянную времени объекта Т проводят горизонтальную линию тр через новое установившееся значение регулируемой величины, затем — касательную до пересечения ее с линией тр в точке к и вертикаль от точки с до точки 1\ отрезок 1к (в масштабе) и соответствует постоянной времени объекта Т.
Величина Т позволяет судить об общей продолжительности самовыравнивания и характере изменения регулируемой величиной во времени. Например, для одноемкостного объекта регулирования по истечении времени с момента, когда закончилось транспортное запаздывание (в объектах с запаздыванием), или С'!Момента возмущения (объект без запаздывания) регулируемая величина, достигнув точки составит 63,2 % предельного отклонения Хтах, что вызвано этим возмущением.
Соответственно через время 27’ регулируемая величина достигает значения 0,865Хшах; через 3Т —значения 0,956Хшах; через
-
значения 0,99Хшах, т. е. к этому времени процесс самовыравнивания практически закончится.
Степень самовыравнивания р определяют из соотношения Р == К/Хтах. По степени самовыравнивания р находят коэффициент усиления Ко (Ко — 1/р), показывающий, насколько существенно изменяется регулируемая величина от изменения положения регулирующего органа.
Скорость разгона е, или максимальную скорость изменения регулируемой величины X в процессе самовыравнивания, определяют для одноемкостного объекта, проводя через точку с вертикаль до пересечения с касательной в точке е и линию, параллельную ай, через точку е; отрезок ес и дает в масштабе скорость разгона е.
Тангенс угла наклона касательной а выражает скорость изменения регулируемой величины X.
Полученные данные, т. е. значения тп, та, Т, р и е, позволяют судить о динамических свойствах объекта регулирования, на основании которых выбирается регулятор и определяются параметры его настройки, обеспечивающие устойчивость и высокие качественные показатели системы автоматического регулирования. Снятие кривой разгона проводят не менее трех раз при различных возмущениях.
Контрольные вопросы а задания
-
Что такое объект регулирования?
-
Что называется нагрузкой и как она влияет на процесс регулирования?
-
Что называется емкостью и как она влияет на процесс регулирования?
-
Что называется самовыравниванием и как оно влияет на процесс регулирования?
-
Что такое время запаздывания и как оно влияет на процесс регулирования?
-
Что характеризуют время разгона и постоянная времени объекта?
-
Расскажите о способах определения свойств объектов регулирования.
-
Какие кривые называют кривыми разгона и как они строятся?
Лабораторная работа 5. Экспериментальное определение динамических характеристик объектов регулирования
Содержание работы. Овладеть методами и навыками определения основных свойств объекта регулирования.
Описание лабораторной установки. В качестве объекта регулирования в работе рассматривается лабораторная электрическая печь сопротивления, а для записи кривой разгона используется самопишущий потенциометр ЭПП-09. В схеме лаборатор* ной установки для определения кривой разгона 'электрической печи (рис. 128) электронагреватели Н включены в сеть через резистор /<?/, рассчитанный на понижение напряжения с 220 В до 190 В. Печь 2 нагревается до установления постоянной температуры, которая фиксируется с помощью системы, состоящей йз термопары ТП (первичный преобразователь), подключенной к потенциометру 1. После стабилизации температуры дается выдержка
-
... 3 мин. Затем включается потенциометр и замыкается контакт ОБ. В результате напряжение на нагревательных элементах повышается примерно на 15 %. Это изменение напряжения соответствует скачкообразному изменению возмущения, которое будет
зафиксировано через резистор К2 потенциометром. Одновременно потенциометр ведет запись £ = f (т), т. е. кривую разгона объекта.
л
2>ГП
н
/
Р77%
VII
-и
п
X7/
-сэ-
ниях. Сначала контакт замыкается, а затем, после установления нового установившегося режима,
контакт <35 размыкается.
Рис.
128. Схема лабораторной установки для
построения кривых разгонв
Снимают кривые разгона. По кривым разгона методом касательных определяются следующие свойства
объекта: полное запаздывание тп, постоянная времени объекта Т, степень самовыравнивания р и скорость разгона е.
Содержание отчета. Отчет должен содержать принципиальную схему и описание установки, кривые разгона и основные свойства объекта регулирования, паспортные данные печи, термопары и потенциометра ЭПП-09. Отчет заканчивается выводами по работе.